|
ȫ�Լ췴��ʽ��������ϵͳ
�콭��
����ժҪ����ȫ�Լ췴��ʽ��������ϵͳ����ɡ�����ԭ������Ҫ����ָ�꼰�ؼ���������Ľ�����������������������DZ������ϵͳ�Ľӿڵ�·��
�����ؼ��ʡ����Ե��������������ǣ������䡣
1 ȫ�Լ췴��ʽ��������ϵͳ����ɺ�����
ȫ�Լ췴��ʽ���������뵯��ʽ��Ť��ʽ������������������ŵ㣬���Ե絯�������е����ʵ���˱ջ�ϵͳ��������DZ��ľ��ȺͿɿ��ԣ�ϵͳ��̬Ʒ�ʺã�Ƶ���ɰ�ϵͳ��Ҫ������ѣ�ϵͳ�նȸߡ������ȸߡ���
CZ-3A(B)����õ���������ϵͳ�����������Ǻ��������ݵ�������������ɣ���ϵͳ����ȫ�Լ췴��ʽ���������DZ����ŷ���·�Ŵ����������Լ����ε�·������ֱ�����ε�Դ��ÿö�������9ֻ8K17-3A��3ֻ8K18-3A���ֱ�װ�ڼ����һ���������������ϡ���
��������ϵͳ���ڻ������̬����ϵͳ����Ҫ��������ǣ����м���ĸ�����ƫ��������3����̬���ٶȣ��������ٶȳ����ȵ�ģ���ѹ�ź������ϼ������ͨ��ִ�л��������������̬����ʵ�ֻ�����ȶ����С�����
2 ����ʽ���������ǵĻ�����ɼ�����ԭ��
2.1 ����ʽ���������ǵĻ�����ɪ�
����ʽ������������Ҫ�����������������������ͬ����������������ϼ�����������֧�в��������װ�õȲ�����ɡ����������ԭ����ͼ1��ʾ��
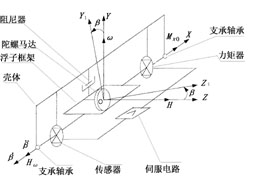
ͼ1 ����ʽ���������ǹ���ԭ��ʾ��ͼ
����Ľ��ٶȣ�(��)��s����W(s)������·�Ĵ��ݺ���
OXYZΪ��������ϵ����������OY�������е������ʦ�ʱ������OX�ĸ������ijһ��������H���أ�������ϼ����������ص������ϣ�����һ�������Ǧ£���֮������������һ����³����ȵĵ�ѹ�ź����ŷ���·�Ŵ����������źŷŴ����Ŵ������ͨ�˲���У�����ź��Ե�����ʽ����������������������������������ƽ������ء���ԭ����ͼ2��ʾ����
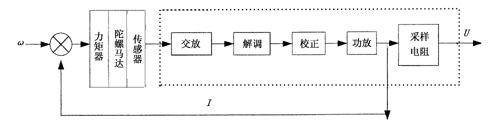
ͼ2 ����ʽ����������ԭ����ͼ
�������������Ǵ��ݺ�������ͼ��ͼ3��ʾ��
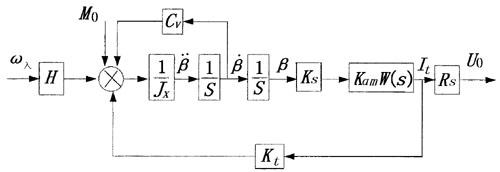
ͼ3 ����ʽ���������Ǵ��ݺ��� ��
H������ĽǶ�����kg��m����s��Jx�����ӵ�ת��������kg��m����Cv���DZ�������ϵ����N��m��rad��Kt��������������ϵ����N��m��A��
Ks���������ı���ϵ����V��rad��Mo�������ĸ������أ�N��m��It�����Ƶ�����A��U0���DZ�����λ��ѹ��V��Rs���������裬����
Kam������·�ķŴ�����V��V���¡����ӵ�ת�ǣ�rad������������
����
2.2 �DZ�����Ҫ�ṹ����
a) ��������(CM-0.025)Ϊ�����ͬ��������ö˸�ʽ������У�������Ķ˸�����Ƕ��һ�ԴŸ֣�������װ�и�Ӧ��Ȧ�������������תʱ����Ȧͨ���и�����ߣ���Ӧ���Լ��ѹ���õ�ѹ�ܼ������������ͬ����ͣת��ȫ���̡���
b) ������(LQY-5)Ϊ��Ȧ����ʽ���������ɶ��������ת�������������ɣ�ת�������װ�п��ƺͲ����������飬��������Զ˸ǵ���ʽֱ�Ӱ�װ���DZ������ϡ���
c) ������(JCW-4)Ϊ��ͬ����ʽ����������������������˸����Ϊһ�壬������ϼ��ڶ˸���������ת�������ö�������Ͽɵ��ݶ�������������λ����
d) ������ϼ����DZ��Ĺؼ���������С���Ϸֱ�װ�д�����ת�Ӻ�������ת�ӡ���
e) ����������ԲͲʽҺ�������������ø��������������DZ������ڱ���֮���С��϶��������������
f) �¶Ȳ���װ��ѡ��ZB-01�Ľ����ͼⲨ���ƹܡ���
g) �DZ�������ɿ����ǰ������ɣ��������������DZ������ᶨλ�Ķ�λ�顣ǰ��װ�б����DZ�������������ı��ơ���
2.3 �����DZ����ƹ����еĹؼ�������
Ϊ�����˿�ϵͳ������Ҫ���ڷ����DZ����ƹ����н�������µĹؼ���������
a) ����ѡ��֧����ʽ����֤�DZ��ĸ������ȣ�����С������϶����Ħ�����ص�����Ȧ�����������Ϊ����֧�У����ƽ����Ϊ����֧�У�����������ϼ�����װ��в�λ��ͬ�Ķ���ߵ�0.01 mm����
b) ����������װ�ã�����DZ���λ��ѹ���ȶ��ԣ����װ��������ѡ����ʴ��������ʴ���͵��ԡ����ӵ�C������ͭ����
c) �����Լ�װ�õ���ƣ������Լ������ڻ�����ǰ������DZ������ܷ������������Լ�װ�ã�����������ϵͳ���������ı�Ҫ���������Ĺ���ԭ���ǣ����õ��ԭ���������������תʱ���Լ���Ȧͨ���и������������ҽ����źţ����Լ����ε�·�����һ��Ƶ��Ϊ1 000 Hz�������źš���
d) ����ѡ���ȴ����淶������������ļӹ����գ��ϸ���ƶ˸�������������ת�Ӵ��Բ��ϵ������ȶ��ԣ�ȷ������ĵ���ͬ���������������Ƚ��ķ����ز��Լ�����Ԥ�ȿ�������ĵ������ܡ���
e) ��Ȧ�����������������ѡ�ö�ת�ӷ���������������Ÿֱ���Ÿ�Ӧǿ��ֵ��ƽ��ֵΪ�������ݵĴŸ������������ȷ��������������ϵ����һ���ԣ���֤�˴Ÿ�����ĺϸ���Ϊ100%����
f) �����DZ����ͼ�����������������װ�õ�����ֿ�����߳���Ч�ʣ�����������߱����֣���С�Ͷ������ߵij������
g) ��·�Լ�װ�õ������������������������Ȧ�����DZ����ʵ��ĵ������Լ����������ϵͳ�Ƿ�������������
�����Լ����·�Լ��ʵ��Ϊ��������Ŀɿ���������Ҫ���á�����
3 �������ݵ��������ɼ����ܪ�
3.1 �������ݵ��������ɪ�
�������ݵ��������뷴���DZ�����ר�õ����豸�������ŷ���·�Ŵ����������Դ�����ŵ�Դ�������Լ����ε�·����ɡ�����
3.2 �����书�ܪ�
a) �������������еĽ��ٶ��ź�ת������֮�ɱ�����ֱ��ģ���ѹ�źţ���
b) �ṩ�������������õ������Դ����
c) �ṩ�������ݼ����õĵ����Դ����
d) �ṩ���������·����ġ�15 V��Դ����
f) �ṩ��ң��ϵͳ�������Դ�����ŵ�Դ����15 V��Դ����·���ݵ�����źš�����
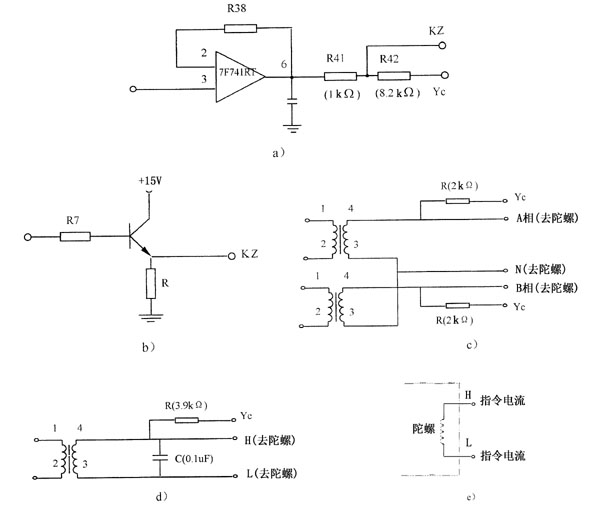
3.3 �ŷ���·�Ŵ�������ɼ����ê�
��·�Ŵ�����Ҫ�ɽ����Ŵ�ͨ�˲��������������ͨ�˲���У�������ࡢ���š���Դ��ͨ���������ȵ�·��ɣ���ԭ����ͼ4��ʾ��
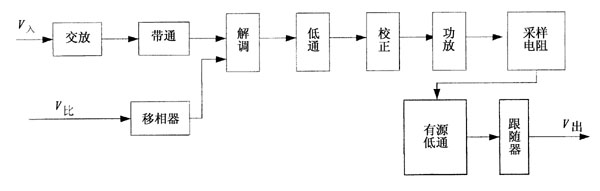
ͼ4 �ŷ���·�Ŵ���ԭ��ͼ
��
3.4 ��·�Ŵ�������еĹؼ�������
a) Ϊ���·�Ŵ����ĵ�ż����������ڻ�·�Ŵ����������������һ�����룬��������(��ͼ4)����
b) ��·�Ŵ�������в����˾��ܺ���Դ��P��N�ᵥ���µIJ��������������ϵͳ�IJ������Ⱥ�����źŵĶԳ��ԡ���
c) ��ϵͳ���ж�̬��ƺͷ�����㣬����ѡ��У������������˲���·��ȷ��ϵͳƵ����������������ϵͳҪ�������˵�·�Ŀ������ԡ������ԡ�����
3.5 �������ݵ�Դ��
a) �������ݵ�Դԭ����ͼ��ͼ5��ʾ��
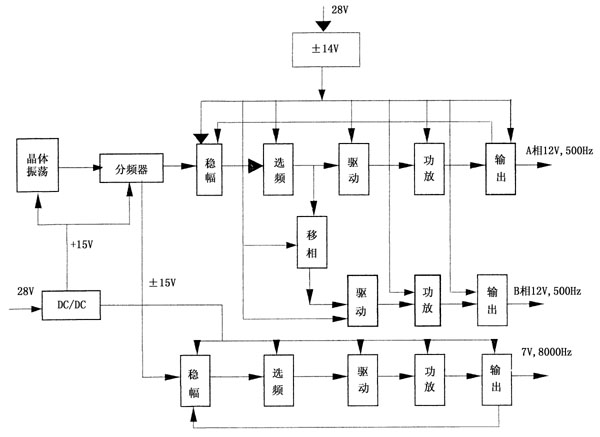
ͼ5 ��Դ��·��ԭ����ͼ
b) ������Դ����ɼ����á���
1) �����ͷ�Ƶ������ʯӢ����ͷ�Ƶ��CC4060�����ɵ���·����һ��Ƶ���ȶ��Ļ��źţ� ��
2) �ȷ���·��Ŀ�����ȶ���Դ�������ѹ�����������ѹ�仯ʱ���������ѹ���ȶ����䣻��
3) ѡƵ��·������Ƶ��ķ����źţ�����Դ��ͨ�˲�����Ϊ���Ҳ�����
4) ���������·����ѡƵ����ź��ٴηŴ��ṩ������������������أ���
5) �����·������RC���࣬����������Ҳ�����90����������
c) ���ε�Դ�����н���Ĺؼ���������
1) �ڵ�Դ��·������DC��DC���뼶��ʹ�����봫�������ŵ�Դ�ֱ��ṩֱ���磬�������Դֱ����28Vֱ���磬�����������ŵ�Դ��DC��DCֱ����Դ������15 V������˵�Դ�ĵ�ż�����������
2) ����Դ��ѡƵ��·���ȷ���·�����ŵ�·���ö��μ��ɼ���������˵�Դ�Ĺ����ɿ��ԡ���
3) ���������Ӽ���������ߵ�����Ĺ����ɿ��ԡ�����
3.6 �����Լ����ε�· ��
�����Լ����ε�·�������ǽ������Լ�װ������Ľ����źŽ��зŴ����Σ���������ʽ�������ԭ����ͼ6��ʾ����

ͼ6 �����Լ����ε�·ԭ����ͼ
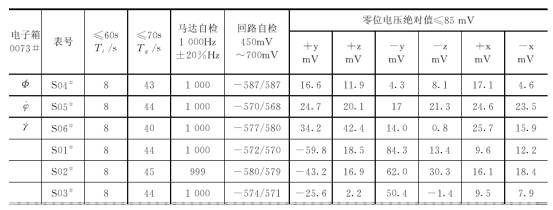
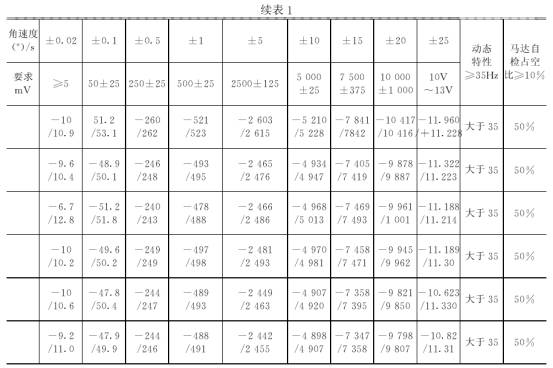
4 ��������ϵͳ����Ҫ����ָ��
4.1CZ-3A(B)��������ϵͳ����Ҫ��������ָ��
a) ����ϵ����0.5 V��(��)��s����������
b) ����ϵ������
�����ٶȪ��ء�1�㣯sʱ����������С�ڻ����0.1�㣯s����
�����ٶ�1�㣯s���ء�15�㣯sʱ����������С�ڻ����5%����
�����ٶ�15�㣯s���ء�20�㣯sʱ����������С�ڻ����10%����
c) �����ȣ���
���ء�0.02�㣯s����
�����ٶȪ���=0.02�㣯sʱ����Ӧ������ľ���ֵ���ڻ����5 mV����
d) ��λ����U0��0.17 �㣯s(��Ӧ85 mV)����
e) ������Χ������min����max��0.02�㣯s��20�㣯s��
�����ٶȦ�max=20 �㣯sʱ����Ӧ�����Ϊ10 V����
f) ����Ƶ�ʣ���f��35 Hz����
g) ����ȣ�0.3��0.8����
h) �������ݵ��Լ죺��
���������⣺����ͬ�������Լ�����Ϊ(1 000��20%) Hz����
��·�Լ��⣺��7 mV��������·�����ѹ�ľ���ֵΪ(500��20%) mV����
�������������������������ľ���ֵ������20 mA������
4.2 ���ε�Դ����Ҫ����ָ��
a) ���������Դ��(12��1) V��(500��0.5) Hz��ʧ���С��5%����
b) ���༤�ŵ�Դ��(7��0.2) V��(8 000��1) Hz��ʧ���С��3%����
c) DC��DCֱ����Դ��(��15��0.2) V����15 V����ֵ֮��С��0.15 V���Ʋ�С��25 mV����
��
4.3 ��������豸��������ת̨C-145�ľ���ָ��
a) ���̣���0.01 �㣯s����300 �㣯s����
b) ���ȣ�1%��0.5%������
4.4 ��������ϵͳ�Զ��������豸8C140-3A�IJ��Ծ���
���Ծ���Ϊ0.5%������
5 ��Ԫ���Ԫ�
������������ϵͳ����Ҫ���Զ��������豸ѡ����̨��������ת̨��ȫ�Զ����Է������������Ϊ������һ��ΪZ80���������ģ�黯��ƣ���һ��ΪBASIC�������������λ����Ӳ���С���λ�������̨����������ת̨�о����б���IEEE-488�ӿڡ������������ǵIJ����豸�У��״����������������ƣ�����������������������ϵ�������ص㡣����������������Զ����ԣ�ÿ�����������ж��ֹ��ܲ��Լ����Ȳ��ԣ������������Ƴɹ�������Զ����ϵͳ�����ܻ��̶ȣ�ʵ�������������Dz�ؼ����ʵķ�Ծ����
a) ����̨���ܣ�����DZ���������λ��ѹ���DZ������ȡ���·�Լ졢�����Լ졢�DZ�������Լ���Դ�����IJ��ԣ����������ݲɼ���������ϡ����ݴ�����ϵ�����롢�����ӡ�ȡ�
��
b) ȫ�Զ����Գ���ԭ����ͼ7��ʾ��
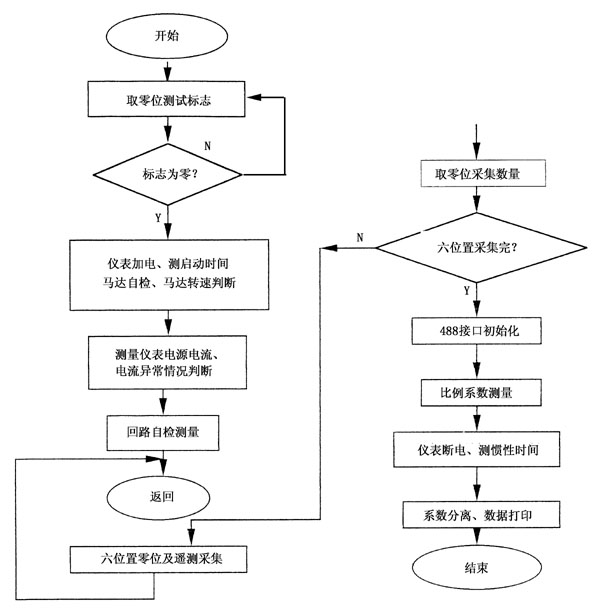
ͼ7 ȫ�Զ����Գ���ԭ����ͼ
��
c) �߾��ȵ�������ת̨�ɻ�е̨��Ϳ�������������ɣ����е̨����һ����Ħ���Ҹ�������С�ľ�����ϵ�����ÿ������֧�У�̨���������̨��Ĵ�ֱС��0.01 mm��Ϊ�˱�֤
���ʵľ����Ժ�ƽ���ԣ����û���ʽ���װ�ã���ԭ����ͼ8����
d) ��������ϵͳ�ڲ��̨�����µ��Զ����Կ�ͼ��ͼ9����
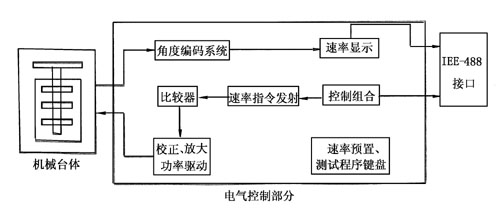
ͼ8 ����ת̨ԭ����ͼ
ͼ9 ���̨��������������ϵͳ�Զ����Կ�ͼ
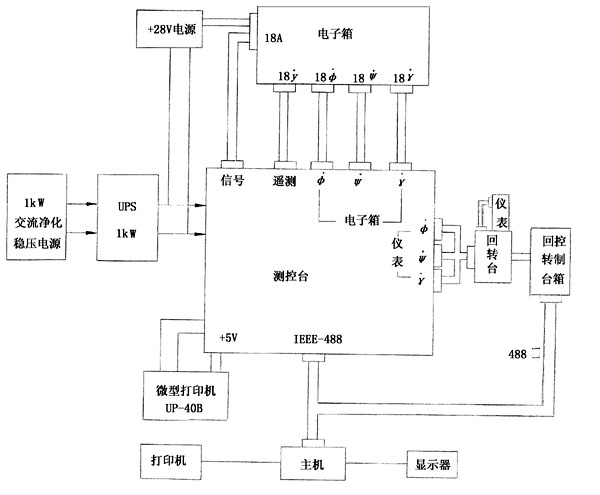
6 ��������ϵͳ�����ϵͳ��ң��ϵͳ�Ľӿڵ�·��
��������ϵͳ�����ϵͳ��ң��ϵͳ�Ľӿڵ�·��ͼ10���� ��
ͼ10 �����ϵͳ��ң��ϵͳ�Ľӿڵ�·
7 �����瘟
CZ-3A(B)��8K17-3A���������ڹ������Ȳ��÷���ʽȫ�Լ췽����ʵ����С�ͻ����Գ���ϵ����ϵͳ����CZ-3A(B)������Ѿ�ȡ��CZ-3A Y1��Y3��CZ-3B Y2��Y5���������Բ���ɹ������������Dz������ݼ���1��
a) ����������ϵ�����źŽӿڣ�b) �����Լ��źŵ�����ӿڣ�c) �����Դ12 V��500 Hz��ң���źŽӿڣ�d) ���ݼ��ŵ�Դ7 V��8 000 Hz��ң���źŽӿڣ�e) ����ָ���źŵ�����ӿڡ�
����������1 �Ľ�����ʽ���������Dz������ݱ���
Description of Whole Self-Check Feedback Rate-Gyro System
Zu Jianghong
(Beijing Institute of Control Device,Beijing,100076)
����Abstract��This paper describes the composition, working principle, main technical performance parameters and the solution of main technical problems of the whole self-check feedback rate-gyro system. And the interface circuits of meters and control system are introduced.
����Key Words��Inertial navigation, Rate gyroscope, Electronic box.
�콭�죺Ů��������ʦ��38�꣬��Ҫ���º�����������о�
�콭�죨�����������о�����������100084��
1999-09-15 |