��������IMU ��ԭ����Ƚ�
���� �C ʲô�� IMU�� ���Բ�����Ԫ ��IMU�� �Ǵ�����ϵ���еĵ���Ԫ������ʹ�ü��ٶȼơ������Ǻʹ����Ƶ�������������������ٶȡ����ٶȺͷ���I �� IMU �ɼ��ٶȼƺ���������ɡ�II �� IMU �����������ơ� ���ٶȼơ������Ǻʹ������ص����ᣨX��������Y�������Z��ƫ�����������ݡ�Ҫ��ȡ��������������ݣ���Ҫ����ÿ�����������������ٶȼơ������Ǻʹ����ƣ������� II �� IMU�����͵� IMU ���������� 9 �����ɶȣ����ɶȣ���������
3 �����ٶȼ�
3 ������
3 ��������
һЩ IMU ���ܾ��и�������ɶȣ������¶ȴ�������GPS ��������ѹ���������ȡ����ǿ��Ը��ݼ��ٶ�ִ����̬���ٶȺ�λ�ü��㡣 ���������ڼ����λ�á��������͵�IMU�������ƶ����������DZز����ٵġ����뼤���״�Ͳ�̲���һ��ʹ�á� IMU ��ι�����
Ҫ�˽� IMU �Ĺ���ԭ�����������ȷ���ÿ��������� �����1�����ٶȼ� ���ٶȼ���һ�����ڲ����������Ļ����豸����Щ�������ǣ�
��̬��������
��̬�������˶���������
���ٶ����ٶȱ仯���ٶȳ���ʱ��IJ��������磬һ�����г��� 30 ���ڴӾ�ֹ���ٵ� 6 ����/Сʱ������ٶ�Ϊÿ�� 30 ����/Сʱ��5 ���� <>����
�μ����ɲ���2�������� ��������һ�����ڲ����ַ���ͽ��ٶȵ��豸������һ���ij���Բ�̣�������ת��������ɵ����ге��κη�����תʱ�����ݽǶ����غ㣬����ķ����ܰ�װ����б����ת��Ӱ�졣
�����3�������� ��������һ�ֲ������Ե��豸��
���ķ���
��������
�ض�λ�ôų�����Ա仯
ָ�����������һ�ֲ��������ų�������豸������������£�����Ĵų��� ROS �C ���� IMU ���� ������ ROS ���ݵ� IMU ���������� sensor_msgs/Imu.msg ��Ϣ��ʽ�����й� /imu ��������ݣ�
std_msgs/����

geometry_msgs/��Ԫ��
geometry_msgs
/ʸ��3
ȡ�� 3D ��ת�ͷ�����Ա�ʾΪŷ���ǻ���Ԫ����
ŷ���� ŷ������ X��Y �� Z ��������Ƕ�ֵ��ʾ��ÿ����תֵ��˳��Ӧ�ã�������Ӧ�á� Ч�棺 ŷ���Ǿ���ֱ�۵ġ�����ɶ�����ʽ��
�ȣ� ��ijЩ�����У�ŷ���ǻ��ܵ������������Ӱ�죬��ʧȥһ�����ɶȡ� ������Ӧ��������תʱ����һ����ڶ�����ת���ܻᵼ�µ�������ָ����ǰһ������ͬ�ķ���Ȼ��������תֵ����Χ��Ψһ��Ӧ�á�
��Ԫ�� ��Ԫ�������ڱ�ʾ����ķ������ת�����ֱ�ʾ���ĸ�������ɣ��ڵ�λ������Ϊx��y��z��w������Щֵ�������ǶȻ��ᣬͨ������Ҫֱ�ӷ������ǡ�
Ч�棺 ��Ԫ����ת���������������Ӱ�졣
�ȣ� ������Ԫ�����ܱ�ʾ���κη����ϳ��� 180 �ȵ���ת������ֱ���������⡣
���ٶ� ���ٶ�����άʸ����x��y �� z����ʾ�����ٶ�ֵȡ���� x��y �� z �ᡣ
���Լ��ٶ� ���Լ��ٶ�����άʸ����x��y �� z����ʾ�������Լ��ٶ�ֵȡ���� x��y �� z �ᡣ
Э���� ���ڴ�������Э�����Ǵ��������ȵ����Ŷȡ�Э������Ը��ݴ����������Ǿ�̬�ģ�Ҳ���Ը��ݾ��ȹ���ֵ��ʱ��仯�����ϸ��¡� ��ͬ�������� IMU;���ǿ��Ծ��о�̬��̬Э���ÿ����������һ��������Э����ϵ������ϵ���ɴ���������Ӳ�����������ָʾ��ֵ�Ŀɿ��ԡ�
IMU ���Ը��� �������� ��ȷ����������Ŀ�Ĺ���Ҫ��ʱ����Ҫ�������ʹ�û������Լ�ʹ�öʱ�䡣���磺
��Դ��ѹ�����أ�
�������������ࣩ
���ʣ����أ�
���������� ���ֱַ��������˴����������崫������������������ɣ� 1. ��Χ =>���������ɵ��ƶ�����
���ڼ��ٶȼƣ�������G��Ϊ��λ������
�����Ǹ��������ܹ��Զ�/��Ϊ��λ�����Ľ���ת���ʽ��з���
�������Ԧ�TΪ��λ������������������������ᣨx��y��z������
2. ������ => һ���������֣���ʾ���Բ����ͼ�����С�仯�������ڴ�����������Ϊ��ش�����������λ��ֱ����ء�λ��Խ�࣬������Խ�ߡ� ������ƫ�ƣ�δʩ������ʱ���ٶȼ��ϵĶ�������������������С�� ������ƫ�ƣ��������ڽ��˶�ʱ������ֵ��ƫ�ƣ���������¶��йء� �������ʣ��ڸ���ʱ����ڽ��еIJ��������� �����ܶȣ���ÿƽ��������Ϊ��λ���壬ͨ��Ϊ��
ug/sqrt��Hz�� ���ڼ��ٶȼ�
�����ǵĶ�/��/ƽ�������ȣ�
���������ٶȼƻ������ǹ�����Ƶ�ʷ�Χ��
�ӿڣ����� IMU ��Ƕ��ʽϵͳ��ͨ�ŵ��º�Э�顣
�¶ȷ�Χ������������ȫ�������ṩȷ��������ͺ�������¶ȡ� ������� ��̬���ȣ����豸����ȶ�/��ֹʱ����������ľ��ȡ�
��̬���ȣ��豸�˶�ʱ����������ľ��ȡ�
��ת�����������������֮��IJ��죬�Զ�Ϊ��λ��
���������ƫ������ƫ��֮��IJ��죬�Զ�Ϊ��λ��
����Ư�ƣ��ۻ������ʱ��仯��
ԭʼ���ٶ�/������/������ÿ���������ڽ����κδ���֮ǰ��ԭʼ�����
У���ٶ�/������/�������������ںϺ�ÿ������������������ڴ���������ÿ���źš�
У ��鴫���������������Ҫ������һ���£�У��Уѡ�ȡ����Ԥ�����Ŀ���� ��ƣ����Уʹ�ô�������ƽ��ֵ���ṩƽ�����ܡ�
ÿ���豸��ÿ���豸��У�����������УijЩ���أ����紫�������档 ��̬��������У���Խ��ܣ�����������ֳ��Կ��ܶ�̬�Ľ����������������¶ȶ��仯�������ڴ���������������Ӧ��ʱ���е�����
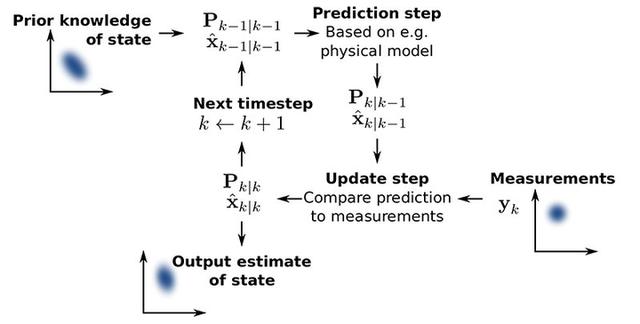
�����ں��㷨 �������˲��� �������˲���ʵ����һ��ģ�ͣ�
�ף��˲���������ģ�ͶԴ���������һ�����ֵ���м���
Ȼ������ȡ����ֵ���������������бȽ�
�����������ģ�ͣ�Ϊ��һ�β���������ȷ�ļ���
�Ӵ�������õ�ÿ���������ж�����ͳ�ƸĽ�ģ�ͣ��Ա���������ͬʱ�����жϴ������ľ��ȡ���ģ��ȡ���ڴ������������Ӧ�á������ƶ�������ϵͳ����ʵ�����֪ʶ���������ǣ����������ڿռ���ƽ�ȶ��������ƶ���������������GPS������ܱ������������͵�̫���С�
����ζ�ţ����һ��ʼ���ṩԽֵ�Ĵ�������ʼ�����㲻̫���ܵ����飨���統��������ʱGPS/���ߵ�ϵͳ�����������Ŀ��ŶȻ��ڼ�����ĵ������½���ֱ�����ٴο�ʼ�������ֵ����ȼؼ���ƽ��ֵҪ�ã���Ϊ�������˲������Թ����������ʱ��ȷ�Ĵ����������ǣ�����������һ���������ܹ��������ȷ��ֵ�� �⽫ȷ���������������У�ֱ�������������ٴ�����������
�������˲���Ӧ�������ɷ����ͱ�Ҷ˹�����ĸ�һ��ĸ�������ǻ���֤������������������ѧϵͳ��
PID �˲���
���Ļ�����ϵͳ�����䱸PID�˲�������Щ�����ɵ������������͵�ԭʼ�������˲��������е������ö����жϲ��滻Ϊ�����̶�ֵ��kp��ki �� kd��������һ��У��ϵͳ��ͨ�����ƻ�·���������Ի����ȷ���������ʹPIDֵ���Զ����ֶ����õģ����������������̣����������У��жϣ��ظ���Ҳ�ǿ��������⻯�汾��������ִ����������衣
�Զ��������
������ϵͳͨ���ǻ�ϵģ���������֮�䡣
ROS IMU ��
����� ROS �����л����������������� ROS ���ݵĴ�����������ס�����ζ���������Ѿ�������һ�� ROS ����ʹ�������� ROS �½������� IMU ���ԣ����������� /imu �����Ϸ���ԭʼ���ݻ���������ݣ�����ȡ����ʹ�� IMU �ķ�ʽ��Ȼ���� ROS �ϣ����Զ��������Ի�ȡ�����ڵ��������ݡ� һЩ ROS �������Ѿ�ʵ�ֲ����£�
imu_transformer �� �ṩ�ڵ�/�ڵ���ϵ��������������ڽ� IMU ���ݴ�һ�� TF ֡ת��Ϊ��һ�� TF ֡
imu_tools ��
Imu_filter_madgwic �� �˲�����������ͨ�� IMU �豸�Ľ��ٶȡ����ٶȺͣ���ѡ�����Զ����ںϵ�һ�������ϣ����� Sebastian Madgwick �Ĵ���
Imu_complementary_filter �� �˲�����������ͨ�� IMU �豸�Ľ��ٶȡ����ٶȺͣ���ѡ���Ŷ����ںϳ���Ԫ�����Ա�ʾ�豸�����ȫ��֡�ķ����� Roberto G. Valenti ���㷨
rviz_imu_plugin����ʾ sensor_msgs����Imu ��Ϣ�� rviz ���
imu_utils �� ������ MATLAB �ϸ��� IMU ���ܵ�������
ѡ����ʵ� IMU
���ɼ���
���ɹ�����
Ƕ��ʽ������
��⣨Arduino��Raspberry Pi �ȣ�
ROS������
�ӿ�
������ĿҪ��ѡ�� IMU������˵� IMU ���ṩԭʼֵ���� UM7 ���˴������ֵ��ֱ���� ROS ��Ϣ�з������ǡ����ܷdz����ƣ���ʹ������ IMU�������������ǵĸ��ӷ������;��
���ɼ���
�����˲����������ܣ�IMU SBG ϵͳ )
Ƕ��ʽ������
��⣨Arduino��Raspberry Pi �ȣ�
ROS������
�ӿ�
�� GPS �����ݼ��� �� SBG ϵͳ ��Բ 2 �� INS IMU )
�ڴ浥Ԫ���� IMU �����������ӵ��������ϵ���������������������Щֵ�������ṩ�й���̬������λ�á��ٶȡ����ٶȺ���ת�ٶȵ���Ϣ�����ǣ�IMU���׳���Ư�ƴ����������ʱ������ƶ��ۻ�����Ϊ��ֵ������ǰ��ֵ�����⣬ʹ�ôų�����ֵ��IMU���ܻ��ܵ������ų�������������ṹ�ȣ���Ӱ�죬����ܻᵼ�¾����
���ǿ��Խ��и�����ʹ�ù�������������Щ���� IMU ������Ư�ƺ����ӡ�����������һ�ַ����ǿ���Э����ֵ������ˮƽ����������Ƕ�̬�ģ���Э����ֵ����ʱ����仯����һ�ַ��������� GPS ��������GPS �źſ��Ը��� IMU ֵ��������Ư����
���ۣ�IMU����ȱ��
IMU ������
���Ե���ϵͳ���������κ��ⲿ��Ϣ����������̫������
���Ե���ϵͳ�����ṩλ�á��ٶȡ���̬�ͽǶ����ݣ��ɴ˲����ĵ�����Ϣ�������ġ�
���ṩ��Ƶ���������ȶ�
IMU �ľ�����
��ʹ�����Լ��ɵ���ϵͳ����Ϣ����˶�λ�������ʱ������ƶ����ӣ����ھ��ȵ�
ÿ��ʹ��ǰ����Ҫ��ʼ���룬����Ҫʱ��
�����ṩʱ����Ϣ