原创 挽风 古月居 2021-07-20 17:15
背景
在运输行业,自动导引车(AGV)由于具有自动导向、路径识别、安全避障等功能,在自动化运输、生产管理等多方面发挥了重要作用,其研究受到了广泛的关注。当前移动方式包括轮式、足式、履带、蛇形四大类方式,其结构如下图所示。

AGV移动类别<图源于网络>
其中轮式移动最为广泛,而为了适应空间狭小,提高运动灵活度,全方位移动自动导引车诞生了,全向轮作为全方位移动实现的关键部件,目前已经发展了正交轮、单排轮、双排轮、Castor轮、各向异性摩擦轮、Mecanum轮等,其结构如下图所示。
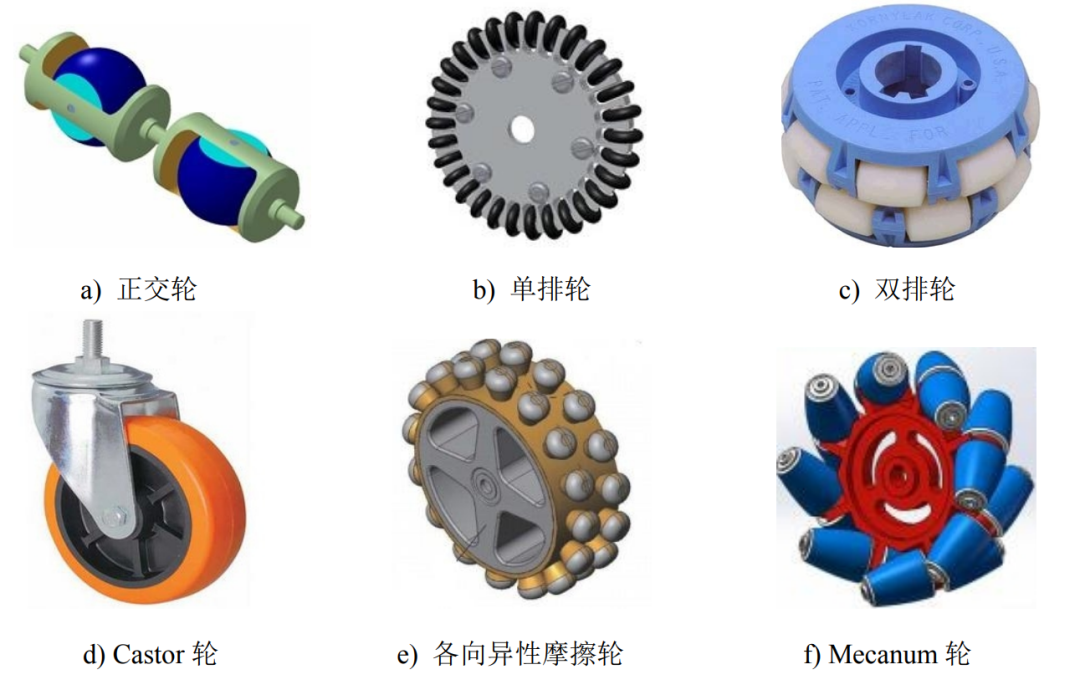
全向轮类别[1]
什么是麦克纳姆轮
定义
麦克纳姆轮(Mecanum wheel)外形结构如下图,,瑞典麦克纳姆公司发明的一种全方位移动轮式结构,由基于主体轮辋和一组均匀排布在轮毂周围的回转辊子组成,且辊子轴线与轮毂轴线呈一定角度(一般为 45°),小辊子的母线是等速螺旋线或椭圆弧近似而成,当轮子绕着轮毂轴线转动时,周边各小辊子的外包络线为圆柱面,因此该轮可以连续地向前滚动。

麦克纳姆轮结构图
麦克纳姆轮根据夹角45°,可以分为互为镜像关系的A轮和B轮。由速度的正向分解,A轮可以分解为轴向向左和向前的力,如下图所示。
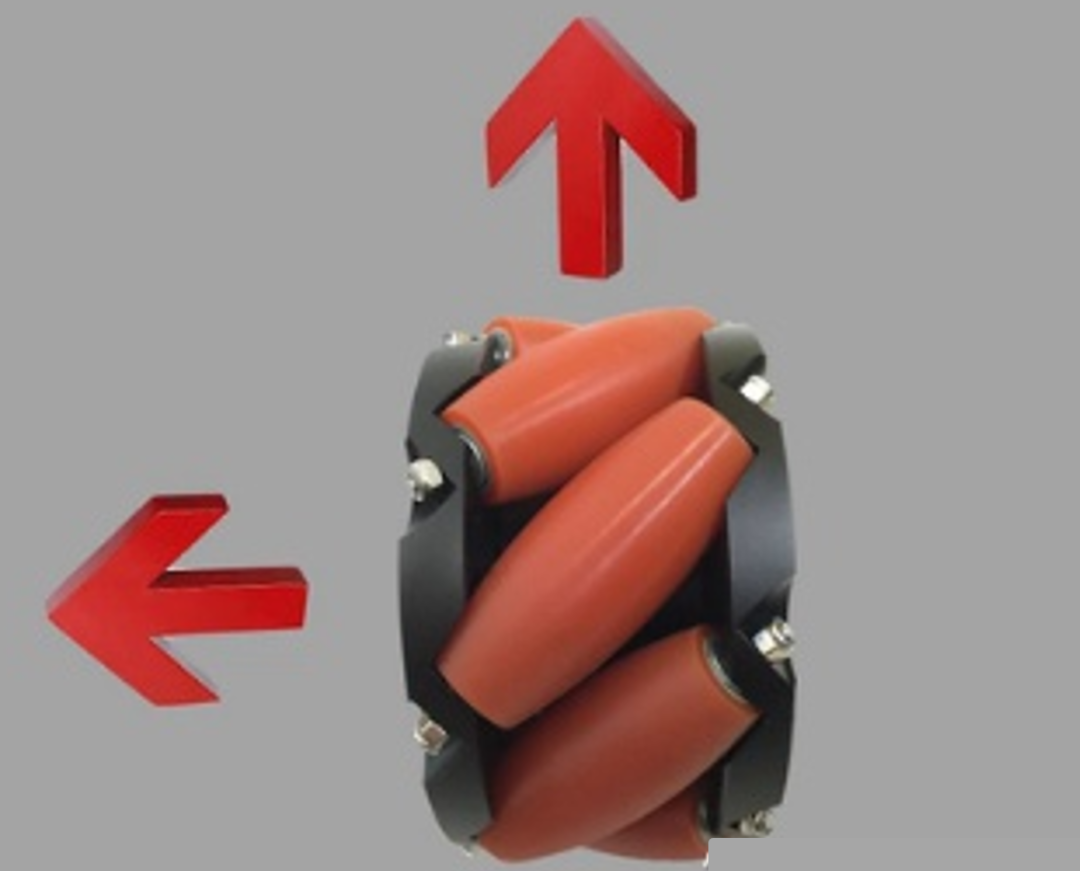
麦克纳姆轮运动速度分解示意图
特点
(1)结构特点:由轮毂,辊子构成,部分含有减震环(或减震装置),轮毂轴线与辊子轴线成45度夹角。
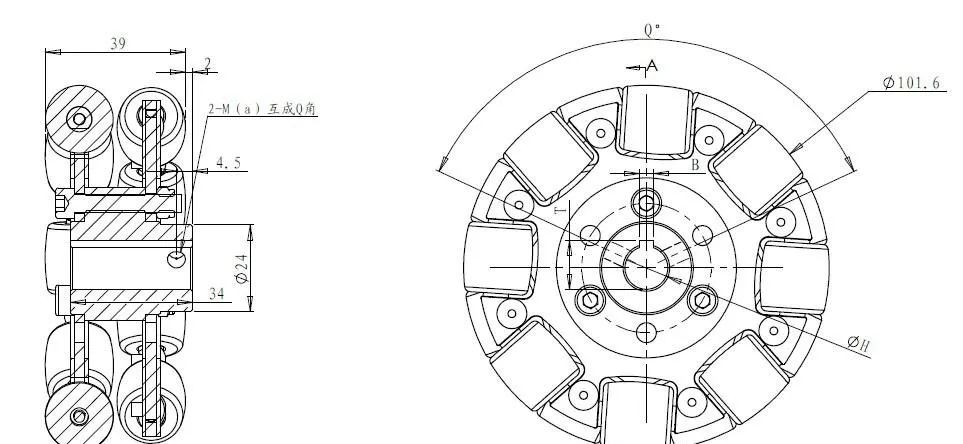
麦克纳姆轮内部结构图
(2)万向性:在生产或者物流运输的过程中,货物需要多方向的运输,如果底部轮子太死板,无法轻松的改变方向,那么只会增加劳动力,浪费时间。麦克纳姆轮的万向性,让运输更加轻松改变方向,满足不同客户的需要。
(3)灵活性:麦克纳姆轮的灵活性是非常重要的,只有解决了底部平移的灵活性,才能让智能搬运设备更加轻松的完成用户的指令。
(4)平稳性:麦克纳姆轮的平稳性也是相当有利的,在运输一些贵重物品的时候,如果设备运行不平稳,很容易造成损失。
不足
(1)效率较低:在运动中总需要抵消某一方向的速度分量,相对于普通的车轮损失了很多功率;
(2)触地性能差:对行驶地面的平整度要求较高,在不平坦的地面上由于辊子触地不均匀,摩擦力分配有误差,无法按照预定的轨迹运行,会偏离轨道;其次,需要靠弹性机构来保证四个轮子都触地,设计要相对复杂一些。
(3)行驶时由于不连续的辊子在起运动作用,会有颠簸感,即使有缓冲机构,但是还是无法避免,因此只适合在低速运动下运动;
应用
麦克纳姆轮运动灵活,微调能力高,运行占用空间小,但是成本相对较高,结构形式相对复杂,对控制、制造、地面等的要求较高,适用于空间狭小,定位精度要求较高、工件姿态快速调整的场合,所以当前麦克纳姆轮一般应用于大型物件的精密对接装配、转运、高精尖机器设备的检修方面等领域,例如航天航空的检修、企业工厂的物流搬运等环节。
麦克纳姆轮运动分析
麦克纳姆轮的运动速度
麦克纳姆轮旋转运动时,给辊子一个力相对于地面运动。由于辊子轴线与轮毂轴线有一定夹角,使得运动方向产生偏离。此时设定辊子上一点到轮毂中心距离为r,轮毂角速度为ω则,辊子上该点的线速度为v=ωr。且分解此时辊子速度,由于辊子轴线与轮毂轴线夹角为45度,得到平行于轮毂轴线速度分量v1=ωr/√2,同时垂直于轮毂轴线的速度分量v2=ωr/√2,与v1相等。
麦克纳姆轮的运动方向
以如图所示麦克纳姆轮作为标准摆放方向,麦克纳姆轮顺时针旋转时辊子相对于地面有向左后方运动的趋势,麦克纳姆轮逆时针旋转时辊子相对于地面有向右前方运动的趋势。

麦轮结构图
(1)轮子逆时针旋转时
选取其中一个辊子做受力分析,辊子所受摩擦力方向与其运动趋势方向相反。当麦克纳姆轮逆时针时,辊子相对于地面有向右前方运动的趋势,则所受摩擦力方向为接触点左后方向。分解此时的辊子运动,则会得到向后以及向左的速度分量,所以说此时麦克纳姆轮向左前方运动。
(2)轮子顺时针旋转时
选取其中一个辊子做受力分析,辊子所受摩擦力方向与其运动趋势方向相反。当麦克纳姆轮顺时针时,辊子相对于地面有向左后方运动的趋势,则所受摩擦力方向为接触点右前方向。分解此时的辊子运动,则会得到向前以及向右的速度分量,所以说此时麦克纳姆轮向右前方运动。
麦克纳姆轮受力分析
麦轮受力分析图如下。
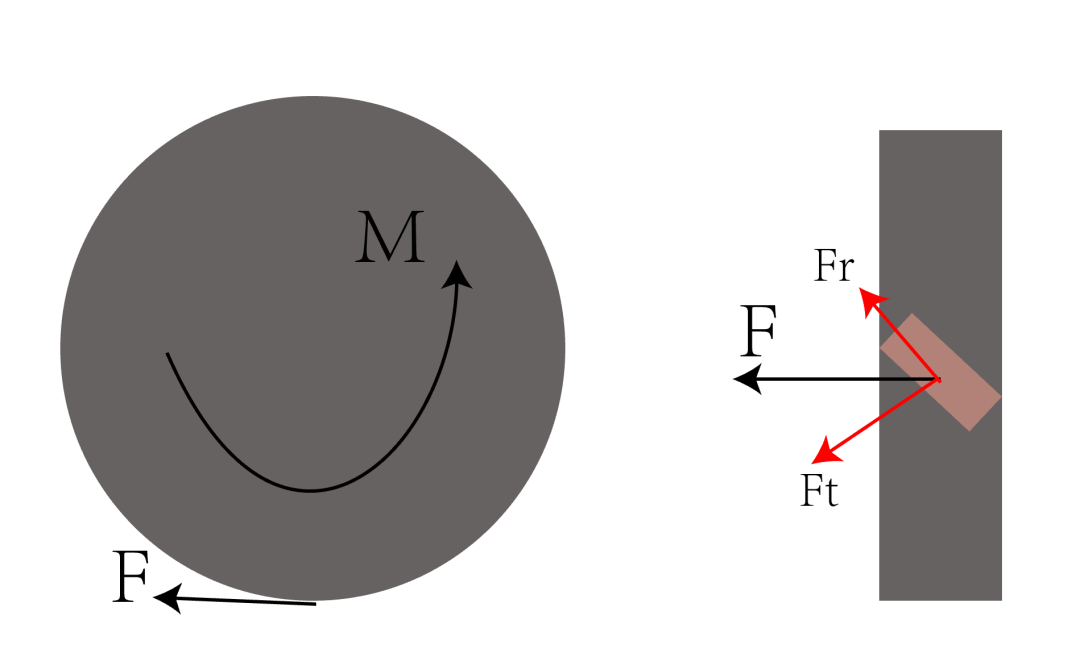
当麦轮受电机驱动时,驱动力矩使得绕轮毂轴转动,辊子会与地面产生摩擦力F,其作用力方向与抵消力矩方向一致;
将地面摩擦力Ff沿着垂直和平行于辊子轴线方向进行力分解,由于辊子是被动轮,因此会受到垂直于轮毂轴线的分力Ft作用而被动转动,也说明分力Ft是滚动摩擦力,对辊子的磨损较大;沿着轮毂轴线的分力Fr也会迫使辊子运动,是主动运动(辊子被轴线两侧轮毂机械限位),所以分力Fr是静摩擦,滚动摩擦力促使辊子转动,属于无效运动;静摩擦力促使辊子相对地面运动,带动整个麦轮沿着辊子轴线运动。
因此,电机输入轮毂的扭矩,一部分被辊子自转“浪费掉”,另一部分形成静摩擦驱动麦轮整体运动;单个麦轮实际的(受力)运动方向为辊子轴向方向,因此改变辊子轴线和轮毂轴线的夹角,就可以改变麦轮实际的(受力)运动方向。
参考文献
[1] 朱艳杰,基于麦克纳姆轮全向车设计与性能研究 [D]
详谈麦克纳姆轮(二)
原创 挽风 古月居 2021-08-18 17:20
前言
《详谈麦克纳姆轮(一)》提及了全向运动中蟾宫的移动方式,对比如表1,全向轮的类别、麦轮的外形、结构、运动分析,本文将依据前述分析从安装、机械设计的角度介绍麦轮的安装方式、底盘的设计方案。
由绪论章节,国内外研究的消防机器人其移动功能采用的方式主要有三大类:仿人足、履带式、轮式。下表是对上述三类消防机器人移动装置优缺点的总结[25,26-27]。

表1 移动方式优缺点比较
麦轮的整体布局
1. 安装方式
(1)麦克纳姆轮安装在相互平行的轴线上。
(2)先按照以下方法区分麦克纳姆轮的安装方向。

图1 A轮(右旋轮)

图2 B 轮(左旋轮)
则合理的安装方式共有一下两种:
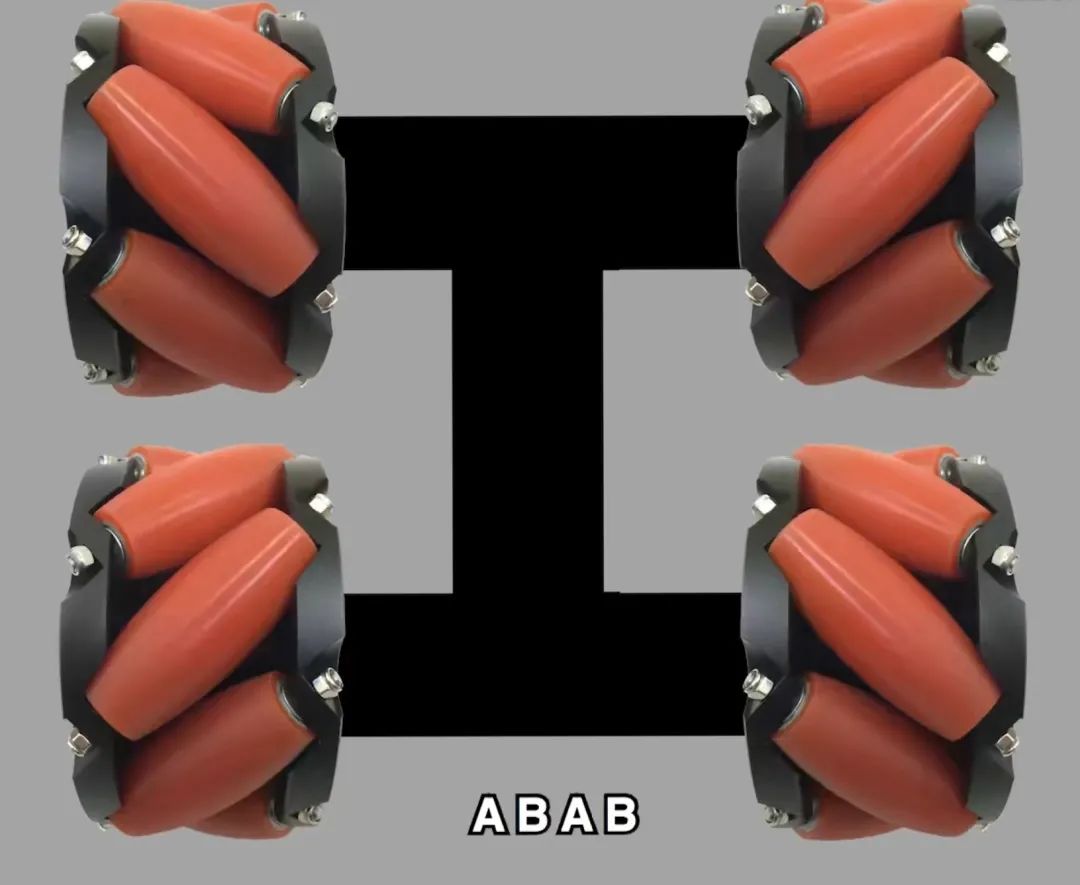
图3 X形布局
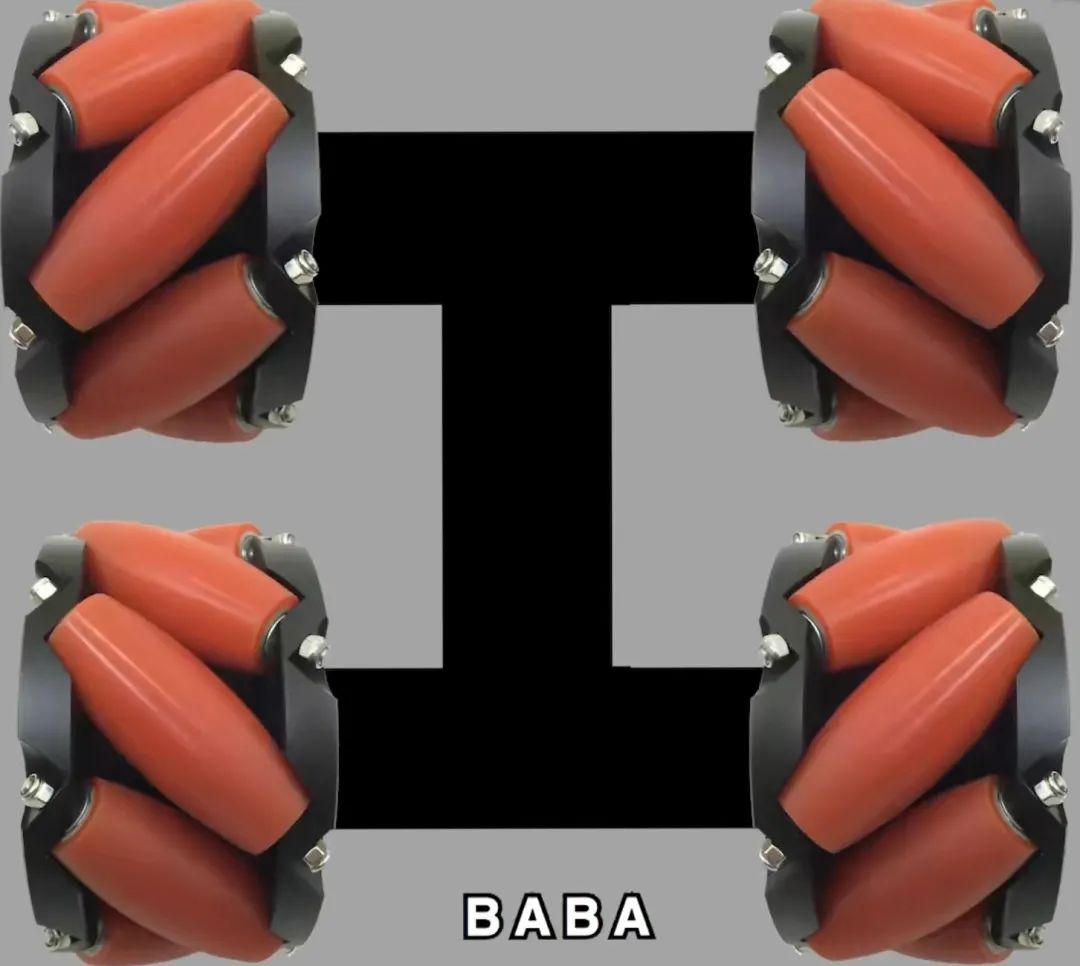
图4 O形布局
即:相同的麦克纳姆轮(左旋轮或右旋轮)放在底盘对角线。
2. 布局
麦克纳姆轮的布局主要分为:X-正方形(X-square)、X-长方形(X-rectangle)、O-正方形(O-square)、O-长方形(O-rectangle)。其中 X 和 O 表示的是与四个轮子地面接触的辊子所形成的图形;正方形与长方形指的是四个轮子与地面接触点所围成的形状,如图5所示。
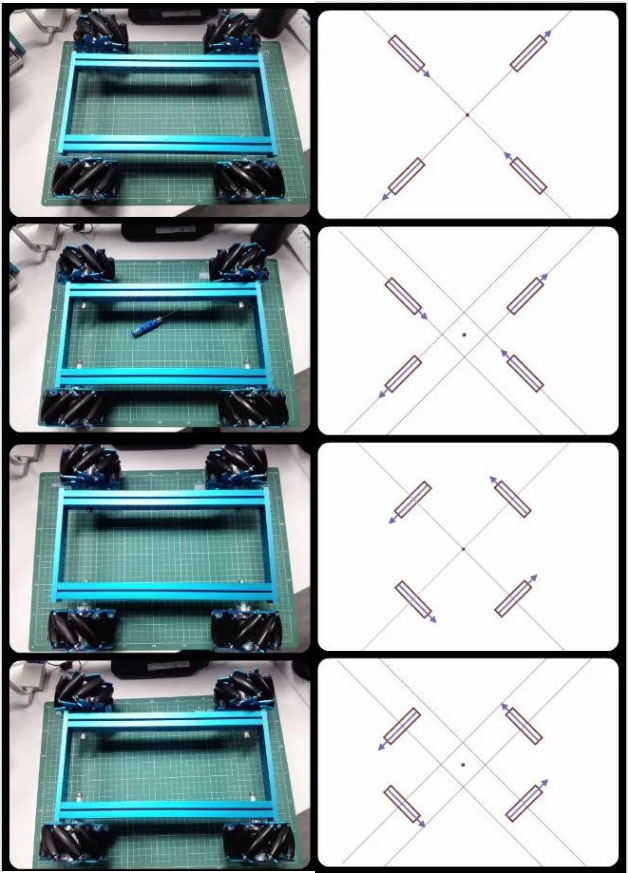
图5 麦克纳姆轮的布局方式
X-正方形:当主轮在电机转矩的驱动下,主轮转动产生的力矩经摩擦力分解后,辊子分解力一部分垂直于辊子,一部分沿辊子轴线,这两部分摩擦力垂直方向的另辊子空转,浪费力,而沿着辊子轴线的力则可以起到驱动小车运动,因此在X-正方形中,如图6所示,红色箭头表示有效摩擦力,因此在水平方向的摩擦力会被抵消,而向前的摩擦力则驱动整个底盘向前运动。
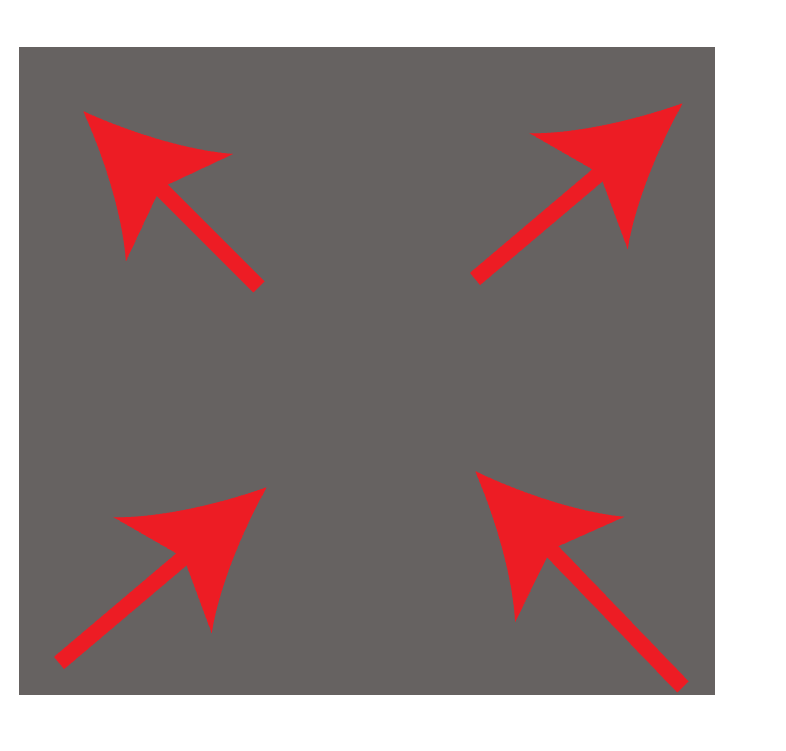
图6 摩擦力示意图
通过改变主轮旋转方向,可以更改摩擦力的方向。但是,除了可以实现左右前后移动外,当进行旋转运动时,发现无论摩擦力朝向怎么排布,摩擦力始终都会经过会经过同一个点,所以无法保证底盘可以绕中心旋转一定的角度,这很大程度限制了麦轮的活动特性,因此很少使用这种排布方式。
其余分析同样,特征如下:
X-长方形:轮子转动可以产生 yaw 轴转动力矩,但转动力矩的力臂一般会比较短。这种安装方式也不多见。
O-正方形:四个轮子位于正方形的四个顶点,平移和旋转都没有任何问题。受限于机器人底盘的形状、尺寸等因素,这种安装方式虽然理想,但可遇而不可求。
O-长方形:轮子转动可以产生 yaw 轴转动力矩,而且转动力矩的力臂也比较长。是最常见的安装方式。
结构设计
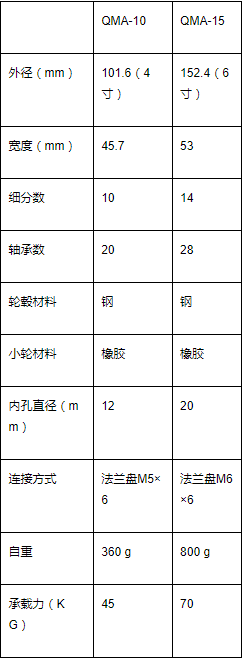
1.麦克纳姆轮尺寸
QMA系列全向轮是轻负载的45°全向轮。轮毂使用钢板冲压成型,坚固而轻便,每个小轮子内嵌两个轴承,滚动平稳顺滑。下表为麦轮的部分尺寸,列出了选型时重要的参数。
2.麦轮与电机连接方式
轮组与电机之间直接连接,可减少因中间传动件损耗的效率。连接示意图如图7所示。
连接法兰2固定在底盘上,电机通过端部的螺栓孔与连接法固定。电机输出轴与连接法兰之间通过轴承连接,末端与麦轮法兰连接,麦轮法兰与麦克纳姆轮固定。电机输出轴端部带有螺纹孔,在麦轮的另一端通过加挡片,用螺栓连接挡片和电机轴,以充当电机轴的轴向定位。
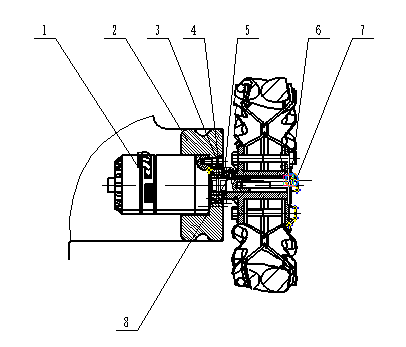
1-电机 2-连接法兰 3-连接螺钉 4-滚动轴承
5-麦轮法兰 6-挡片 7-固定螺钉 8-紧定螺钉
图7 轮组电机连接示意图
3.底盘设计
轮式底盘设计最常见的方案为将麦轮直接安装于底座上,在满足运动学的条件上,还需要具备良好的控制性能与驱动性能。但需要考虑的因素为:当路面不平坦时或者安装不到位时,就会出现其中三只轮子着地,另一只轮子无法接触地面。4个麦轮若无法保证同时着地的话,此时整体运动方向将会发生改变,因为移动装置的运动状态是由所有轮子共同决定,只要一个轮子脱离地面运动状态将会发生变化,因此在设计底盘时需要加入弹性装置,从而保证四轮同时着地。
另外,底盘设计应当满足移动功能的同时,要确保整体功能的实现。在达到要求的基础上,力求结构简单、方便拆装、质量轻便等特点。
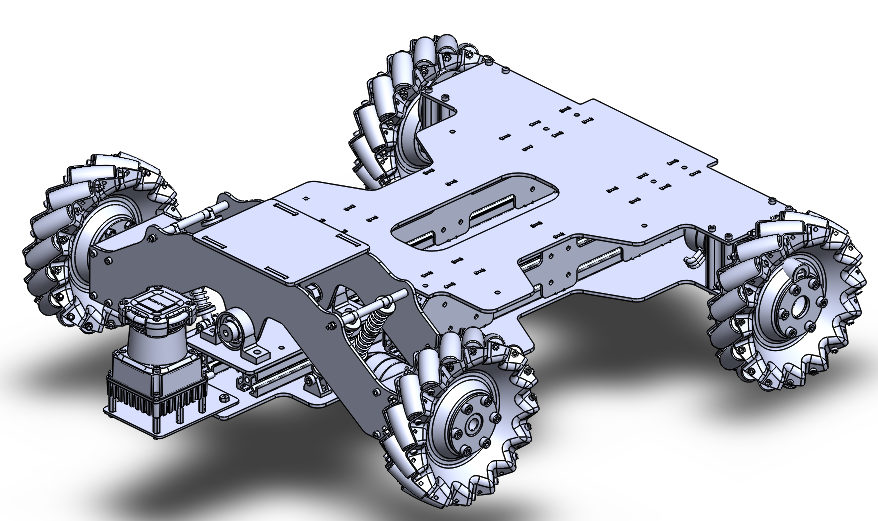
图8 底盘结构示意图
为保证在地面不平整或装配误差存在情况下,四个轮子能够同时着地,底盘整体结构为底盘前架为悬挂摇摆式,后架与底盘整体固定,从而前轮可以绕中心轴左右摆动,在任何情况下总可以保证四个轮子同时着地。
底盘由四组麦克纳姆轮、四个驱动电机、悬挂前车架、底盘固定支架、2525铝型材及部件固定件和连接件组成。悬挂前车架通过轴承座和中心轴连接到底盘底板上,并在前轮组两侧各放置两对弹簧阻尼器充当避震,以保持底盘搭载部件的稳定性。
为保护系统结构免受振动的损伤和提高越障能力,在底盘上安装弹簧避震器。弹簧避震器的作用是减少外界的震动或冲击对设备、控制元件等的影响,并凭借其材料、结构的特点,如弹簧器件,吸收外界的振动或冲击的能量,然后缓慢地释放,从而起到减震缓冲的作用。
底盘支架采用碳纤板作为材料,碳纤板是一种由碳纤维、金属、陶瓷、树脂、等基体复合制成的结构材料。根据与碳纤维复合的材料种类不同,可以将碳纤维复合材料分为四类:金属基、陶瓷基、树脂基、混凝土基碳纤维复合材料,具有抗冲击性、拉伸强度高、抗震性、耐腐蚀性等良好性能。其力学性能如表3。
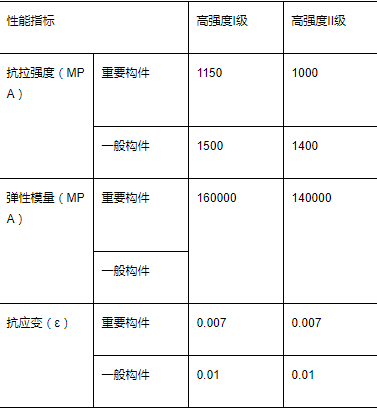
表3 碳纤维板设计计算力学性能
为避免避震器局部受力而导致断裂,避震器与安装座之间均应留有缝隙,如图9所示,可以使用垫片填充。
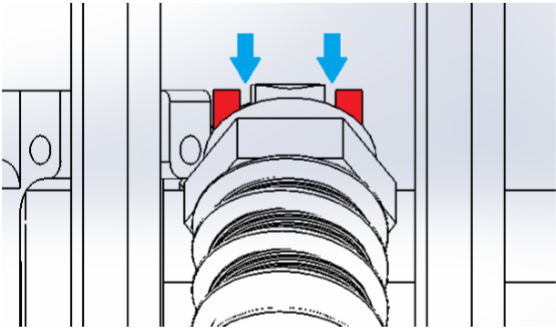
图9 避震器安装图
图片