激光导航AGV车结构设计概述 
1、 底盘设计
底盘最终性能要求:
1)面对各种高低起伏的路面,所有驱动轮必须着地,这样驱动轮才可以正常传递牵引力,否则出现悬空打滑的现象。
2)空载和满载状态下,传递到驱动轮上面的正压力足够大,足以驱动上爬设计坡度。最大牵引力=驱动力正压力*驱动轮摩擦系数。需要克服阻力=滚动摩擦阻力+自重在坡度方向的分量。
注意:针对AGV的工作工况,一般不需要做类似于汽车的阻力减震的(特殊场景除外)。
2、 舵轮简介
舵轮有一个行走轮和一个转向轮组成。行走轮负责牵引,转向轮负责牵引方向。
舵轮根据安装结构的不同分:卧式舵轮和立式舵轮。舵轮承载一般在500Kg以上。行走轮一般会带刹车。

驱动电机分:直流有刷、交流异步电机、交流同步电机。直流有刷是最早舵轮厂商采用的电机,今后的趋势是交流同步电机将会成为主流。
国外舵轮品牌:意大利CFR(浙江同普代理)
国外驱动器品牌:美国ROBOTIQ、 AMC、 Copley、 美国CURTIS柯蒂斯
国产舵轮品牌:巨轮、广州智轮、凤凰动力等
国产驱动器品牌:步科、兴颂、北京诺泰信、亚大传动等。

3、 脚轮介绍
脚轮从运动原理上分:定向轮、万向轮。具体选用要看底盘结构。
脚轮主要指标是:材质、承载能力。
不同材质的抗磨损能力不一样,人造胶一类材质较软,运行静音性能好,对地面保护友好。但是使用久后容易磨损,所以要考虑使用寿命进行更换。
聚氨酯材料,可以做成不同的硬度,高硬度聚氨酯抗磨性能好,但是运行噪音大,长时间运行容易把地坪漆磨出印记。
万向轮分单轮结构和双轮结构,建议120mm直径下的选用双轮结构,保证转向灵活性。在AGV空间结构允许的情况下,尽量选用大轮径的脚轮和驱动轮,带来的好处是寿命长、越障碍物、过空沟能力更强。

驱动轮一般需要根据选用的减速器定制、或者直接购买减速器和驱动轮一体的产品。
驱动轮用减速器一般采用法兰输出行星减速器,尽量不要选择拐角行星减速器(价格高、噪音大)。
脚轮品牌:科顺、上海屹上。
减速器品牌:纽斯达特、东莞威格

4、 减速器和驱动轮一体
建议直接采购减速器和驱动轮一体结构。结构紧凑、故障率低。


5、 单舵轮结构
该结构在叉车上面有着非常广泛的应用。
底盘有1个舵轮、 2个定向轮组成。通过3点确定一个平面的原理,我们知道,这种结构
可以直接适应各种地面,保证驱动舵轮一定着地。根据车重心分布的不同,舵轮是大概会承担50%的自重,所以牵引力非常强。
设计要点:
1)脚轮计算和选型。
2)舵轮计算和选型。
3)底盘上面刚性连接2个定向轮、 1个舵轮。

6、 双舵轮结构
双舵轮底盘由2个舵轮、 2个万向轮组成。 2个舵轮和2个万向轮分别成对角布置。这个4个轮都会受力,为了适应不同起伏路面,需要把2个轮做成上下浮动结构。一般将2个万向轮用弹簧做成上下浮动(或直接选用带弹簧浮动的脚轮)。
浮动结构带来的弊端:横向加速度比较猛的时候,车身会有一定倾斜。
设计要点:
1) 浮动弹簧的选型设计。
2) 弹簧刚度太大时,空载时,可能让舵轮悬空或舵轮正压力太小。
3) 弹簧刚度太小时,满载横向加速时,车身倾斜的厉害

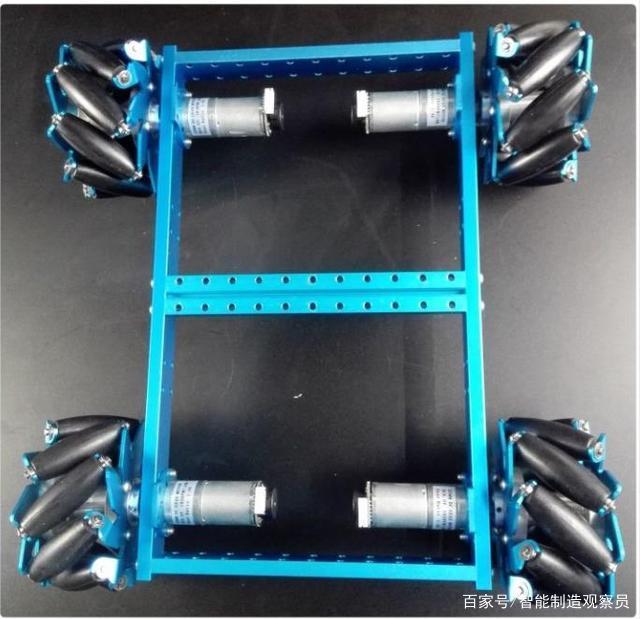
7、 麦克拉姆轮结构
麦克纳姆轮底盘由4个麦克纳姆轮组成,麦克纳姆轮的滚轴倾斜角必须按照下图布置。
该底盘的优点是可以任意方向平移或旋转,是运动灵活度最好的底盘。
运动学要求4个轮子必须同时着地,这样才可以达到理想的运动控制。 4个轮子如果刚性与底盘连接,根据3点确定1个平面的原理可以知道,其中1个轮子必然悬空或受力很小。
为了解决该问题,有如下2种建议方式:
1)将前面或后面2个轮子使用弹簧做成上下浮动结构。
2)将前面或后面2个轮子做成一组浮动桥臂。
所谓的平衡桥臂就是1根杆上面左右固定2个轮子,中间做一个铰接轴和车架固定。使2个
轮子合并为1个受力点。从而使4个麦克纳姆轮都可以同等受力。
8、 双轮差分驱动底盘
服务机器人、 500KG负载以下的AGV常用该结构。
双轮差分驱动底盘可以分2种: 3轮结构、 6轮结构。
3轮结构: 2个驱动轮、 1个万向轮。服务机器人上面有应用。因为是3轮结构,
所以轮与车架采用刚性连接就可以。缺点是,原地旋转时,占用空间较大。
6轮结构: 2个驱动轮在中间、 4个万向轮在车的4个拐角。 6轮结构,必须做特殊浮动处理,才可以保证2个驱动轮始终受力着地。
方案1: 2个驱动轮做2个独立的弹簧上下浮动结构。弊端是:空载和满载时对于弹簧的要求是不一样的,导致适应性较差。特别是爬3度以上的坡时,驱动轮很容易悬空,导致打滑,爬不上去。
方案2:使用3组平衡桥结构,把6个轮子转换为3个受力点。
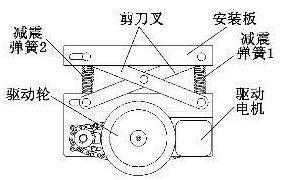
弹簧浮动结构。可以采用剪刀叉或导向轴来上下导向。
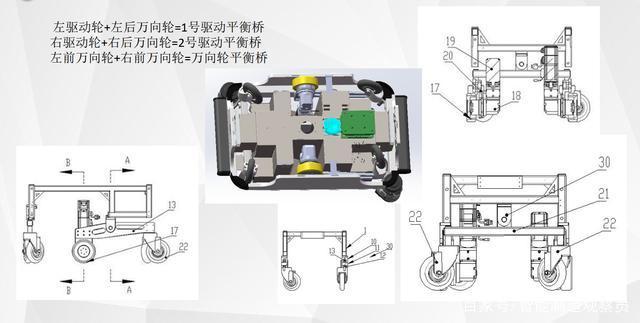
9、 3组平衡桥底盘
左驱动轮+左后万向轮=1号驱动平衡桥
右驱动轮+右后万向轮=2号驱动平衡桥
左前万向轮+右前万向轮=万向轮平衡桥
10、 激光雷达
激光雷达分:测量雷达、避障雷达、测量避障两用雷达。按照应用场景分:室内、室外。
雷达最重要参数是测量距离。用户先根据应用场景,评估需要雷达的探测距离。

11、 激光雷达的安装要求
激光雷达分:测量雷达、避障雷达、测量避障两用雷达。
1、首先根据雷达抗震动和冲击能力,确定是否需要减震支架。
2、如果不需要减震支架,可以使用安装耳固定或者雷达上面的其它
固定螺丝孔。
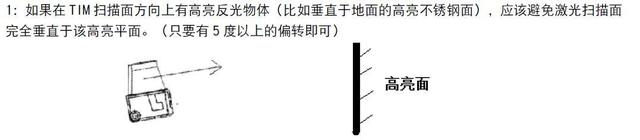
3、避障雷达要求水平朝上倾斜5度左右,以解决高反射物体的探测。
4、测量雷达要求安装平面尽可能与地面平行,用于提高普通定位精
度,因为如果有倾斜角度的话,雷达在不同位置探测出来的轮廓会有
较大误差,最终影响定位精度。
5、激光头安装的位置最好低于200mm的地方,约170mm高度安装位
置最佳(即可做安全避障, 又可以做测量用)。根据车身结构去选择
雷达正装或倒置安装都可以。
6、在雷达布置上面,可以选择车头中间位置、或者车的4个对角点。
如果布置2个雷达在车对角,可以实现车身360度都被激光雷达探测到,
从而避障无死角。
7、不同车体,雷达的安装x、 y方向和旋转姿态会有误差,最终导致
理论相同的定位点,车体却有不同的位置和姿态。通过导航系统可以
设置这3个误差的补偿值,从而保证多车一致性。

12、 避障安全设计
先查阅安全相关标准,确定整车需要达到的安全级别,然后根据安全级别选择安全方面的部件和设计。
整车的安全级别来说,一般是负载越大、速度越快的AGV,安全级别要求就越高。
安全相关的传感器。
1)避障用激光雷达。
2)机械防碰撞结构(拉绳式、橡胶开关式)。建议车身前后安装橡胶防撞条。
3)超声波传感器(不建议使用,多台相互之间容易干扰,单台使用也建议不超过1个)
4)红外避障传感器(容易受阳光干扰)
电气要求:
1)如果要符合欧盟严格的安全要求,需要选择黄色安全避障雷达,同时雷达避障信号必须用黄色安全PLC和电机控制回路关联。
2)机械碰撞信号,急停开关信号,必须使用继电器切断行走电机驱动器的动力或连接到
安全专用STO接口。

13、 充电结构
AGV上面一般会设计手动充电插头。看是否需要自动充电,来决定是否设计自动充电结构。
手动充电插头可以使用:航空插头或安德森插头。 充电电流15A以下可以选用航空插头。安德森插头最大350A的规格都有。
自动充电一般采用刷块式结构。安装方式有:底部、前面、侧面。建议采用前面安装,充电部位安装一对光电开关。 AGV到位后,通过光电开关发出光电信号,控制充电器的工作。

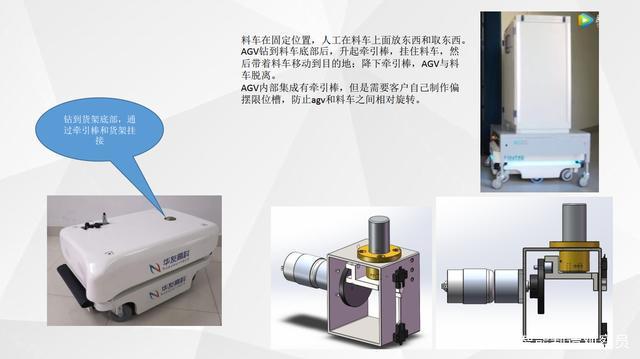
14、 附属执行机构-牵引棒机构
传统牵引棒机构使用弹簧和机械式开关。故障率高。建议采用非弹簧凸轮结构+光电检测开关。
直流减速马达可选择ZHENG ZGB60FG
导向建议采用铜套而不是线性轴承(导柱碰撞后,容易损坏线性轴承)
15、 附属执行机构-顶升机构
顶升机构用于AGV钻到货物底部后,把货物顶起来,运输到目的地后,下降放置到架子上面,然后AGV离开。
常用顶升机构。
1)涡轮丝杆+4导向立柱,使用直流有刷或无刷电机,上下限位安装感应开关。
2)使用一体化的丝杆。

16、 附属执行机构-滚筒机构
一般选用电动滚筒来实现,在滚筒的2个端部设计反射式光电开关,用来检测物料的
到位情况。 2个端部同时可以设置顶升式阻挡机构,用于阻挡物品。
阻挡机构可使用电动推杆作为执行元件。

本文的目的是使客户更好的理解"激光导航AGV"的结构设计要点,希望对您有所帮助。