SRC-2000(S) 选型指导手册
2021年4月19日 更新
编辑作者:Seer Technical Support
编辑时间:2020 年 04 月 20 日
联系邮箱:support@seer-group.com
文档版本:v1.0.1
一、导航型激光支持列表
|
品牌 |
型号 |
基于 SLAM 技术的定位导航功能 |
基于反光板的各项功能 |
|
西克 |
NanoScan3 |
√ |
√ |
|
倍加福 |
OMD30M-R2000-B23-V1V1D-HD-1L |
√ |
√ |
|
西克 |
LMS 系列 |
√ |
× |
|
北阳 |
UAM 05LP |
√ |
× |
激光导航扫描仪安装原则:避开环境中的动态物体可能存在的高度范围,典型高度为 20CM. 激光导航扫描仪安装好后的姿态需要保持为水平姿态,倾斜和旋转都不超过 ±1°, 且在所选激光导航扫描仪的测距范围内, 测量平面不能与地面相交。低于或高于激光导航扫描仪的障碍物检测可以额外选配触碰开关等其他防撞传感器。
二、避障型激光支持列表
所有避障激光需要选用输出 NPN 信号的型号。如果需要使用 SRC 自带的切区功能,需要选用输入为 PNP 信号的型号(用于接入 SRC 的 PDO 输出),目前仅有 TIM310 有相应的型号。如果使用输入为 NPN 信号的传感器,需要在 SRC 的 PDO 上接继电器进行转换才能使用切区功能。(推荐的继电器型号有 OMRON G2RV-SR500 24VDC 或 HF41F-024-ZS)
|
品牌 |
型号 |
扫描距离 |
角速分辨率 |
扫描时间 |
切区功能 |
|
西克 |
TIM310-0130000S02 (NPN) |
0.05~4m |
1.0° |
67ms |
√ |
|
北阳 |
UST-05LN |
0.06~5m |
0.5° |
25ms |
× |
|
兴颂 |
CNS-LS05I |
0.025~5m |
0.5° |
50ms |
× |
三、驱动器、电机支持列表
1.Kinco(步科)
步科官网:
https://www.kinco.cn/product/servo
步科官网可下载完整的手册、CAD 图纸等。
|
步科 |
减速比:16
驱动轮直径:0.2m |
减速比:25
驱动轮直径:0.2m |
减速比:32
驱动轮直径:0.2m |
|
电机型号:
SMC60S-0020-30A_K-3DKH
驱动器型号:
FD123-CA-000
是否可选抱闸:是,24V
电机额定电压:
DC24-70V
功率:200W |
减速器型号:KPX65-16
额定转速:3000rpm
最大行走速度:1.963m/s
|
减速器型号:KPX65-25
额定转速:3000rpm
最大行走速度:1.256m/s
|
减速器型号:KPX65-32
额定转速:3000rpm
最大行走速度:0.981m/s
|
|
电机型号:
SMC60S-0040-30A_K-3DKH
驱动器型号:
FD123-CA-000
是否可选抱闸:是,24V
电机额定电压:
DC24-70V
功率:400W |
减速器型号:KPX65-16
额定转速:3000rpm
最大行走速度:1.963m/s
|
减速器型号:KPX65-25
额定转速:3000rpm
最大行走速度:1.256m/s
|
减速器型号:KPX65-32
额定转速:3000rpm
最大行走速度:0.981m/s
|
|
电机型号:
SMC60S-0040-30A_K-3DKH
驱动器型号:
FD124-CA-000
是否可选抱闸:是,24V
电机额定电压:
DC24-70V
功率:400W |
减速器型号:KPX65-16
额定转速:3000rpm
最大行走速度:1.963m/s
|
减速器型号:KPX65-25
额定转速:3000rpm
最大行走速度:1.256m/s
|
减速器型号:KPX65-32
额定转速:3000rpm
最大行走速度:0.981m/s
|
|
电机型号:
SMC80S-0075-30A_K-3DKH
驱动器型号:
FD133-CA-000
是否可选抱闸:是,24V
电机额定电压:
DC24-70V
功率:750W |
减速器型号:KPX85-16
额定转速:3000rpm
最大行走速度:1.963m/s
|
减速器型号:KPX85-25
额定转速:3000rpm
最大行走速度:1.256m/s
|
减速器型号:KPX85-32
额定转速:3000rpm
最大行走速度:0.981m/s
|
2.MOTEC
手册、CAD 图纸等请联系 MOTEC 中国经销商。
注:选择 Motec 驱动器时请同时配 Motec 原厂的 CAN 终端电阻。
|
MOTEC |
减速器型号:APE 系列
减速比:16
驱动轮直径:0.2m |
减速器型号:APE 系列
减速比:25
驱动轮直径:0.2m |
减速器型号:APE 系列
减速比:32
驱动轮直径:0.2m |
|
电机型号:
DSEM-V240330E40L*
驱动器型号:ARES8015-E-AC(CANopen)
是否可选抱闸:是
电机额定电压:24V
功率:50W |
减速器型号:APE40
额定转速:3000rpm
最大行走速度:1.963m/s |
减速器型号:APE40
额定转速:3000rpm
最大行走速度:1.256m/s |
减速器型号:APE40
额定转速:3000rpm
最大行走速度:0.981m/s |
|
电机型号:
DSEM-V240530E40L*
驱动器型号:ARES8015-E-AC(CANopen)
是否可选抱闸:是
电机额定电压:24V
功率:100W |
减速器型号:APE40
额定转速:3000rpm
最大行走速度:1.963m/s
|
减速器型号:APE40
额定转速:3000rpm
最大行走速度:1.256m/s
|
减速器型号:APE40
额定转速:3000rpm
最大行走速度:0.981m/s
|
|
电机型号:
DSEM-V241230E60L*
驱动器型号:ARES8015-E-AC(CANopen)
是否可选抱闸:是
电机额定电压:24V
功率:200W |
减速器型号:APE60
额定转速:3000rpm
最大行走速度:1.963m/s
|
减速器型号:APE60
额定转速:3000rpm
最大行走速度:1.256m/s
|
减速器型号:APE60
额定转速:3000rpm
最大行走速度:0.981m/s
|
|
电机型号:
DSEM-V480230E40L*
驱动器型号:ARES8015-E-AC(CANopen)
是否可选抱闸:是
电机额定电压:48V
功率:50W |
减速器型号:APE40
额定转速:3000rpm
最大行走速度:1.963m/s
|
减速器型号:APE40
额定转速:3000rpm
最大行走速度:1.256m/s
|
减速器型号:APE40
额定转速:3000rpm
最大行走速度:0.981m/s
|
|
电机型号:
DSEM-V480330E40L*
驱动器型号:ARES8015-E-AC(CANopen)
是否可选抱闸:是
电机额定电压:48V
功率:100W |
减速器型号:APE40
额定转速:3000rpm
最大行走速度:1.963m/s
|
减速器型号:APE40
额定转速:3000rpm
最大行走速度:1.256m/s
|
减速器型号:APE40
额定转速:3000rpm
最大行走速度:0.981m/s
|
|
电机型号:
DSEM-V480630E60L*
驱动器型号:ARES8015-E-AC(CANopen)
是否可选抱闸:是
电机额定电压:48V
功率:200W |
减速器型号:APE60
额定转速:3000rpm
最大行走速度:1.963m/s
|
减速器型号:APE60
额定转速:3000rpm
最大行走速度:1.256m/s
|
减速器型号:APE60
额定转速:3000rpm
最大行走速度:0.981m/s
|
|
电机型号:
DSEM-V481230E60L*
驱动器型号:ARES8015-E-AC(CANopen)
是否可选抱闸:是
电机额定电压:48V
功率:400W |
减速器型号:APE60
额定转速:3000rpm
最大行走速度:1.963m/s
|
减速器型号:APE60
额定转速:3000rpm
最大行走速度:1.256m/s
|
减速器型号:APE60
额定转速:3000rpm
最大行走速度:0.981m/s
|
|
电机型号:
DSEM-V482030E80L*
驱动器型号:ARES8020-E-AC(CANopen)
是否可选抱闸:是
电机额定电压:48V
功率:750W |
减速器型号:APE80
额定转速:3000rpm
最大行走速度:1.963m/s
|
减速器型号:APE80
额定转速:3000rpm
最大行走速度:1.256m/s
|
减速器型号:APE80
额定转速:3000rpm
最大行走速度:0.981m/s
|
3.鸣志
鸣志官网:
https://www.moons.com.cn/
注:鸣志相关机型电机为我司定制款,需通过我司采购,否者无法完成适配。
|
鸣志 |
减速比:20
驱动轮直径:0.18m |
|
电机型号:MDXK61GNMCA000-F01
驱动器:一体化集成
电机额定电压:48V
功率:200W |
减速器型号:PAD064L2-20-P2-OP2-T-14-30-50-70-M5(32907,6-M6,薄油封)
额定转速:3000rpm
最大行走速度:1.43m/s |
|
电机型号:MDXK62GN3CB000-F01
驱动器:一体化集成
电机额定电压:48V
功率:400W |
减速器型号:PAD064L2-20-P2-OP2-T-14-30-50-70-M5(32907,6-M6,薄油封)
额定转速:3000rpm
最大行走速度:1.43m/s |
4.Copley
Coply 官网:
https://www.copleycontrols.com
|
Copley |
减速比 16
驱动轮直径:0.08m |
减速比 30
驱动轮直径:0.18m |
|
电机型号:
60M-01930C5-E
驱动器:ADP-090-36
电机额定电压 48V
功率:600W |
减速机型号:AST60-4-5
额定转速:3000rpm
最大行走速度:0.78m/s |
|
|
电机型号:
SMJ62
驱动器:ADP-090-36
电机额定电压 36V
功率:284W |
|
减速机型号::AD064L2-030-P2-8-30-50-70-M5
额定转速:3500
最大行走速度:1.65m/s |
5.HLS(森创和利时)
HLS 官网:
http://www.syn-tron.com
森创和利时官网可下载完整的手册、CAD 图纸等。
注:森创和利时驱动器必须选择支持 IO 类型的系列,需要使用 2019 年 4 月以后的固件版本,并且支持私有协议。
|
森创和利时 |
减速器型号:PS 系列
减速比:16
驱动轮直径:0.2m |
减速器型号:PS 系列
减速比:25
驱动轮直径:0.2m |
减速器型号:PS 系列
减速比:30
驱动轮直径:0.2m |
|
电机型号:
40LCB010C
驱动器型号:
LS-10510BK(CAN)
是否可选抱闸:是
电机额定电压:48V
功率:100W |
减速器型号:PS-40-16
额定转速:3000rpm
最大行走速度:1.963m/s
|
减速器型号:PS-40-25
额定转速:3000rpm
最大行走速度:1.256m/s
|
减速器型号:PS-40-30
额定转速:3000rpm
最大行走速度:1.047m/s
|
|
电机型号:
60LCB020C
驱动器型号:
LS-10510BK(CAN)
是否可选抱闸:是
电机额定电压:48V
功率:200W |
减速器型号:PS-60-16
额定转速:3000rpm
最大行走速度:1.963m/s
|
减速器型号:PS-60-25
额定转速:3000rpm
最大行走速度:1.256m/s
|
减速器型号:PS-60-30
额定转速:3000rpm
最大行走速度:1.0472m/s
|
|
电机型号:
60LCB040C
驱动器型号:
LS-10520BK(CAN)
是否可选抱闸:是
电机额定电压:48V
功率:400W |
减速器型号:PS-60-16
额定转速:3000rpm
最大行走速度:1.963m/s
|
减速器型号:PS-60-25
额定转速:3000rpm
最大行走速度:1.256m/s
|
减速器型号:PS-60-30
额定转速:3000rpm
最大行走速度:1.047m/s
|
|
电机型号:80LCB075C
驱动器型号:LS-10530BK(CAN)
是否可选抱闸:是
电机额定电压:48V
功率:750W |
减速器型号:PS-80-16
额定转速:3000rpm
最大行走速度:1.963m/s
|
减速器型号:PS-80-25
额定转速:3000rpm
最大行走速度:1.256m/s
|
减速器型号:PS-80-30
额定转速:3000rpm
最大行走速度:1.047m/s
|
四、电池推荐列表
我司的 SRC 的电池适配说明详见: SRC-2000(S) 控制器电池适配说明
|
品牌 |
型号 |
描述 |
|
锂平 |
48V35AH |
48V35AH(适用 AMB150) (269*213*124mm) |
|
锂平 |
48V52AH |
48V52AH(适用 AMB300) (359*249*125.5mm) |
五、手动充电器推荐列表
|
品牌 |
型号 |
描述 |
|
君盘 |
KP900F-60L |
君盘/KP900F-60L/AC:220V/DC:54.6V 15A/带指示灯/带显示屏 |
六、DCDC 稳压开关电源推荐选型表
|
DCDC 品牌 |
DCDC 型号 |
输入电压 |
输出电压/电流 |
|
明纬 |
RSD-100B-12 |
DC 16.8-31.2V |
12V/8.4A |
|
明纬 |
RSD-100B-24 |
DC 16.8-31.2V |
24V/4.2A |
|
明纬 |
RSD-200B-12 |
DC 16.8-31.2V |
12V/16.7A |
|
明纬 |
RSD-200B-24 |
DC 16.8-31.2V |
24V/8.4A |
|
明纬 |
RSD-200C-24 |
DC 33.6-62.4V |
24V/8.4A |
|
明纬 |
SD-500L-24 |
DC 19-72V |
24V/21A |
|
明纬 |
SD-500L-48 |
DC 19-72V |
48V/10.5A |
|
明纬 |
SD-1000L-24 |
DC 19-72V |
24V/40A |
|
明纬 |
SD-1000L-48 |
DC 19-72V |
48V/21A |
七、HMI 屏幕推荐选型表
|
HMI 品牌 |
HMI 型号 |
输入电压 |
通讯方式 |
屏幕大小 |
外形尺寸 |
备注 |
|
顾美 |
MT6037H-W |
DC24V |
以太网 ModbusTCP |
3.5″TFT |
88×88×25mm |
可提供程序示例源文件 |
|
步科 |
GL070E |
DC12V~DC28V |
以太网 ModbusTCP |
7″TFT |
207x125x41mm |
可提供程序示例源文件 |
|
威纶通 |
MT8103IE |
DC24V |
以太网 ModbusTCP |
10.1″TFT |
271x213x36.4mm |
|
|
Proface |
PFXGP4402WADW |
DC24V |
以太网 ModbusTCP |
7″TFT |
207x152.4x38.2mm |
|
八、Wi-Fi 客户端推荐选型表
|
品牌 |
型号 |
输入电压 |
外形尺寸 |
WLAN 标准 |
频率 |
|
Moxa |
AWK-1137C |
9~30VDC |
130×86×26mm |
802.11 a/b/g/n |
2.4Ghz/5Ghz |
|
西门子 |
SCALANCE W734-1 |
19~29VDC |
127x26x147mm |
802.11 a/b/g/n |
2.4Ghz/5Ghz |
|
节点通 |
CPE-2458-AC-S-I |
12~48VDC |
120x85x32mm |
802.11 a/b/g/n/ac |
2.4Ghz/5Ghz |
九、旋转顶升车体驱动器及电机推荐选型
该配置可以顶升 1000 kg 的货物。
|
模组 |
驱动器型号 |
电机型号 |
电机参数 |
减速机参数 |
|
行走模组 |
LS-10530D4 森创私有 CAN 协议版本 |
交流伺服电机 80LCB075C-J43A15 |
750W 3000rpm 2.4Nm 22A |
KOFON SVX85-20
SN:K190102043 |
|
|
|
|
|
|
|
顶升模组 |
交流伺服电机 110LMB040L-243B11 |
400W 550rpm 7Nm 16A
|
无减速机,通过齿轮减速 |
|
|
随动模组 |
交流伺服电机 60LCB040C-J43A16
|
400W 3000rpm 1.27Nm 12.5A |
KOFON SVX65-10
SN:K190102032 |
|
十、双舵轮车体驱动器及电机推荐选型
进口品牌
舵轮:意大利 CFR
http://www.shtongpu.com/
驱动器:美国 RoboteQ
https://www.roboteq.com/index.php
国产品牌推荐同毅全套方案
舵轮:TYD160-SM07530BA-20-126
TYD160-SM07530BA-20-126 20200517.pdf1.2MB
TYD160.SM07530BA.20.126 20200517.stp8.9MB
驱动器:IXL-Ⅱ
IXL-Ⅱ_驱动硬件参数及接口说明1.0.pdf2.3MB
试用手册:
同毅自动化舵轮及驱动器简易使用手册.pdf3.2MB
十一、轮毂电机及驱动器推荐选型
推荐使用森创的轮毂电机以及配套的伺服驱动器。
相关资料可以下载附件查阅浏览。
森创伺服电动轮.pdf0.3MB
DS系列二合一驱动器操作手册20191226.pdf13MB
原理图(供参考).pdf0.3MB
十二、光电传感器型号推荐
光电传感器主要用于检测物体的有无,能否检测黑色物体是评判光电传感器优秀与否的标准。我司测试过很多光电传感器,符合要求的型号为 Sick G10 GTB10-N1212
有关资料可以查阅如下链接:
https://www.sick.com/cn/zh/photoelectric-sensors/photoelectric-sensors/g10/gtb10-n1212/p/p342969
十三、关于超声雷达
鉴于超声传感器存在盲区,方向性差,多车间存在干扰等诸多问题,在 AGV 上不建议采用。
如仍需使用,推荐使用倍加福 I/O 型超声:超声波直接检测传感器 UB100-F77-E0-V31, UB100-F77-E1-V31 等系列(这里的型号只是举例,请根据实际需求选择不同距离的型号)
也可在倍加福官网搜索【超声波传感器】进行相关资料的查阅。
https://www.pepperl-fuchs.com/china/zh/
注:超声雷达必须选用 NPN 型传感器,若对传感器有使用相关的问题可以咨询我司。
十四、接触器型号推荐
经常碰到客户选型的接触器起跳电流过大导致 PDO 保护甚至控制器整机过流保护,下面推荐两款韩国 YM 品牌的 24V 驱动,低功耗,带灭弧接触器。可以联系我司购买。
|
规格 |
型号 |
线圈内阻 |
标称电流 |
|
50A 接触器 |
EVR50-24S |
180 Ω |
133mA |
|
100A 接触器 |
EVR100-24S |
110 Ω |
245mA |
十五、Wi-Fi 组网方案选型
网关/路由器/控制器一体机:
- UniFi Dream Machine Pro(8 普通 LAN 口)/ 3400.00
交换机:
- US-8-60W(8 口,4 POE,4 普通) / 1000.00
- US-8-150W(8 口,8 POE) / 1800.00
- USW-16-POE(16 口,8 口 POE,8 口普通) / 2700.00
- USW-24-POE(24 口,16 口 POE,8 口普通) / 3400.00
AP:
- UAP-nanoHD(覆盖半径 20 米)/ 1600.00
SRC-2000(S) 技术协议-标准条款
2021年3月20日 更新
一、项目概述
1.1 项目内容
根据买方的要求,为买方提供 SRC-2000(S) 系列移动机器人控制器,满足买方自行制造车的需求。
买方基本需求如下:
车辆类型:填写底盘模型
基本功能:描述移动机器人的功能,比如搬运还是牵引,是否需要控制器支持上层机构,上层机构的基本动作是什么.....
适配需求:是否需要适配新的外设?如电池,驱动器,灯板等
二、项目技术说明
2.1 改装要求
控制器改装车型需要根据卖方控制器支持的电气元件进行组装,附表将所需配件适配表列出,请从附件中选择指定品牌的产品,不能根据买方的提出的品牌和设备进行兼容;
选用选型指导手册之外的选型的,出现问题需要将相关部件寄送至仙工或付费到现场解决;
2.2 移动机器人组成
功率模块:锂电池、DCDC 稳压开关电源、充电器,推荐选型见附件
动力模块:驱动器、电机(内置编码器)、减速机,选型支持列表见附件
感知模块:激光导航扫描仪,选型支持列表见附件
其他模块:开机按钮、急停按钮等,推荐选型见附件
2.3 移动机器人本体及配线要求
移动机器人本体的机械设计、加工、安装、改装和电气接线等工作由买方完成,但是必须严格按照卖方的相关要求进行。买方需要安排一名机械和一名电气工程师到卖方公司进行相关工作,包括车体设计、车体改装、电气配线和总体调试等。
2.4 网络构架及要求
2.5 运动设备设置要求
电机驱动器等负责运动的设备和仙工控制器之间的通讯会因为人为和非人为的因素产生中断,如果没有软件或硬件看门狗功能,电机驱动器会持续执行通讯中断前的指令,从而有可能导致车辆失控,因此和仙工控制器适配的驱动器必须配置看门狗功能并在运行的时候保持打开。当异常的通讯中断发生时,驱动器会采取主动停车措施,保证周围的人员和财物安全。如果因客户未按仙工要求配置看门狗功能,导致客户的任何损失,仙工不承担责任。
三、SRC-2000(S) 产品说明
SRC-2000(S)产品使用说明书统一由项目经理提供 PDF 版本。
四、软件功能
|
基于 SLAM 技术的激光自然轮廓导航 |
差动移动机器人模型构建 |
|
|
基于激光扫描仪的环境轮廓建模、地图编辑及路线规划 |
|
|
基于自然环境轮廓的定位及导航 |
|
|
基于 SRC-2000(S) 标准硬件接口的扩展 |
|
|
单机器人监控、任务下发 |
|
|
单机器人网络通讯协议 |
|
|
车体内外参数标定功能 |
五、方案实施
买卖双方根据以下细则进行实施,未尽事宜以双方协商为准。
买方:
5.1. 按照卖方提供的设备备选表进行选型
5.2. 买方自行设计和制造移动机器人本体
5.3. 派遣一名机械和一名电气工程师到卖方现场协助改造
卖方:
5.4 负责控制器 SRC-2000(S) 的调试及相应的培训工作
六、验收标准
6.1 产品验收
按照合同约定的交付清单进行产品验收。
6.2 功能验收
6.2.1 精度
精度依赖于移动机器人本体质量及运行环境,典型的重复到点精度通常为 ±10mm 与 ±50mm 之间。当满足以下条件时,移动机器人的重复到点精度将可以显著提升,典型重复到点精度通常可达到 ±10mm:
1.环境要求 1:去除环境动态干扰因素,比如大量玻璃墙存在的环境导致激光扫描仪扫描数据动态变化太大等。
2.环境要求 2:去除地面不平整因素,需要达到 FF50 (ACI 117 standard), 即 3 米靠尺误差在 ±3mm, 这是一个容易达到的平整度,需要精准到位的点位,地面刚好存在一个凹坑会对到点精度产生影响。
备注:ACI 117(American Concrete Institute's standard for concrete floors)
3.机械结构要求 1:移动机器人本体结构设计合理,开环运动【SRC-2000(S) 不参与闭环控制的情况下】可以进行直线行走及直线倒退,比如不会出现弧线轨迹,之字形轨迹等。且连续的前进后退移动机器人本体两次的直线轨迹可重合,因万向轮换向、结构影响等带来的外力,导致两条轨迹的偏差不超过 1°.
4.机械结构要求 2:移动机器人本体结构设计合理,开环运动【SRC-2000(S) 不参与闭环控制的情况下】的原地旋转 1080 度(3 圈),移动机器人不会发生轨迹圆心偏移超过 0.5 mm.
5.机械组装要求:移动机器人本体结构组装可靠稳定,运动部件回差很小,保证移动机器人本体的执行精度能够达到 1mm/s,比如轮子安装松动,导致回差很大,下发 1mm/s 的速度指令,轮子完全没有反应。
6.核心部件安装要求:SRC-2000(S) 严格按照说明书要求进行了安装,电气连接稳定;驱动器等核心设备,稳定可靠安装,电气连接稳定,通讯链路质量符合要求。比如:要求激光不能斜着安装,通讯线在机器人运行过程中会发生连接时断时续的情况等。
若甲方提供的移动机器人本体,在机械结构设计、机械组装、核心部件安装层面,不满足上述 3 4 5 6 要求,乙方在自身技术能力水平范围内负责给出修改建议,从而帮助甲方迭代优化同一款产品。
6.2.2 基本功能
移动机器人能实现自主定位导航,能根据 Roboshop Pro 软件规划的路线进行前进、后退、原地转向等功能,能够对感知范围内的障碍物进行感知并实现对应功能,包括减速、停止等。
七、 保密
该文件所包含的所有信息均属上海仙工智能科技有限公司所有,包括业务、产品、服务及工艺等。
所以,获得该文件的相关人员必须对所有信息予以保密,同时,该文件的使用者必须承诺:
- 未经仙工书面授权,不得以任何形式向第三方透露文件内的信息。
- 未经仙工书面授权,不得复制、修改或翻印文件内的信息。
- 未经仙工书面授权,该文件不得用于个人或第三方用途。
SRC-2000(S) 程序升级操作指南
编辑作者:Seer Technical Support
编辑时间:2020 年 05 月 11 日
联系邮箱:support@seer-group.com
文档版本:v1.0.0
一、连接准备
1.无线升级时,客户需要将 SRC2000 连入用户自身无线局域网,并了解 SRC2000 此时的无线 IP 地址。
2.有线升级时,客户需要将升级用电脑通过网线,连接 SRC2000 的交换机接口,并配置升级用电脑 IP 为 192.168.192.xx(不可以是 192.168.192.5, 192.168.192.4, 192.168.192.100, 尽量设置 192.168.192.200 之后的 IP 地址),此时,SRC2000 的有线 IP 地址为 192.168.192.5.
二、软件准备
1.升级所需电脑,请安装 chrome 浏览器,不支持 IE 浏览器。
2.已获取我司提供的更新包(.zip 格式)。
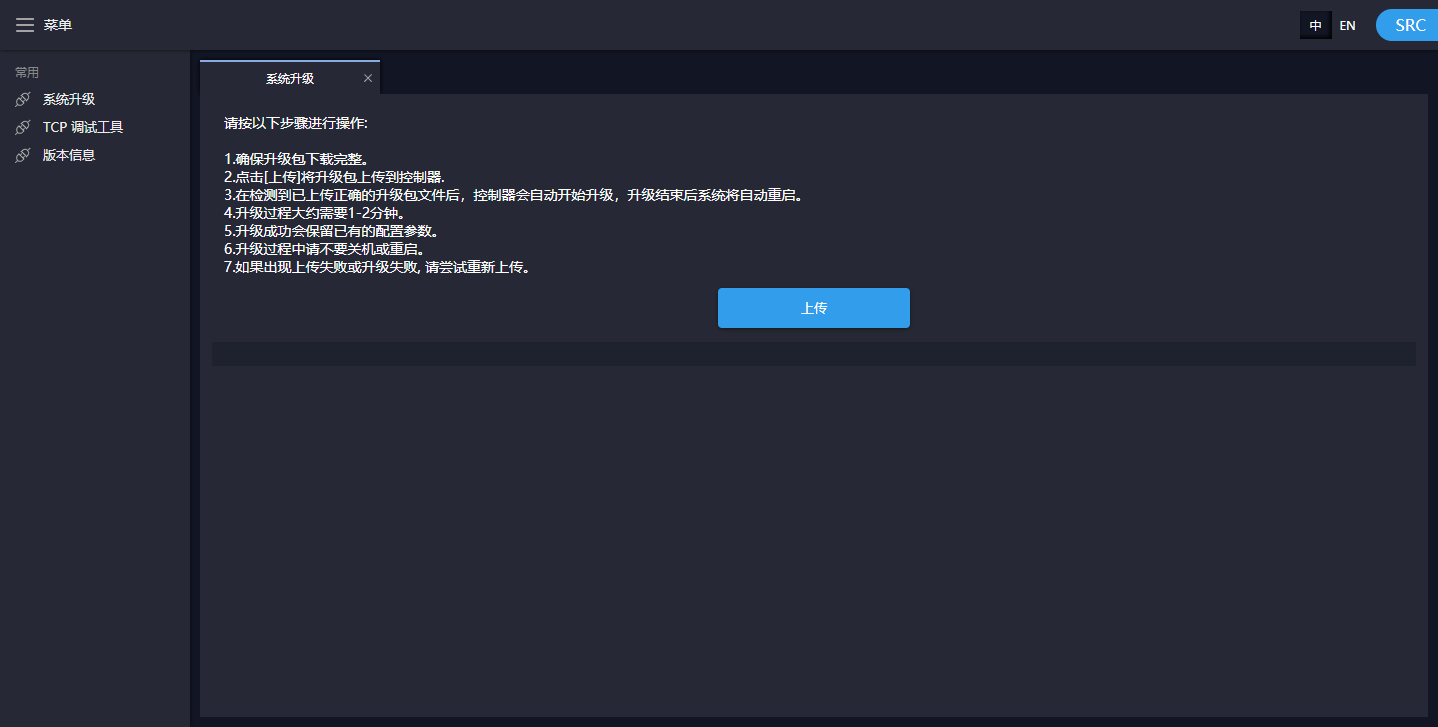
三、软件升级步骤
1.打开 chrome 浏览器,输入 SRC2000 的 IP 地址,将会出现如下界面。
注:若打不开网页,在确认网络连接状态无误后(如通过命令行 ping SRC2000 IP 地址可以 ping 通),请联系仙工售后。
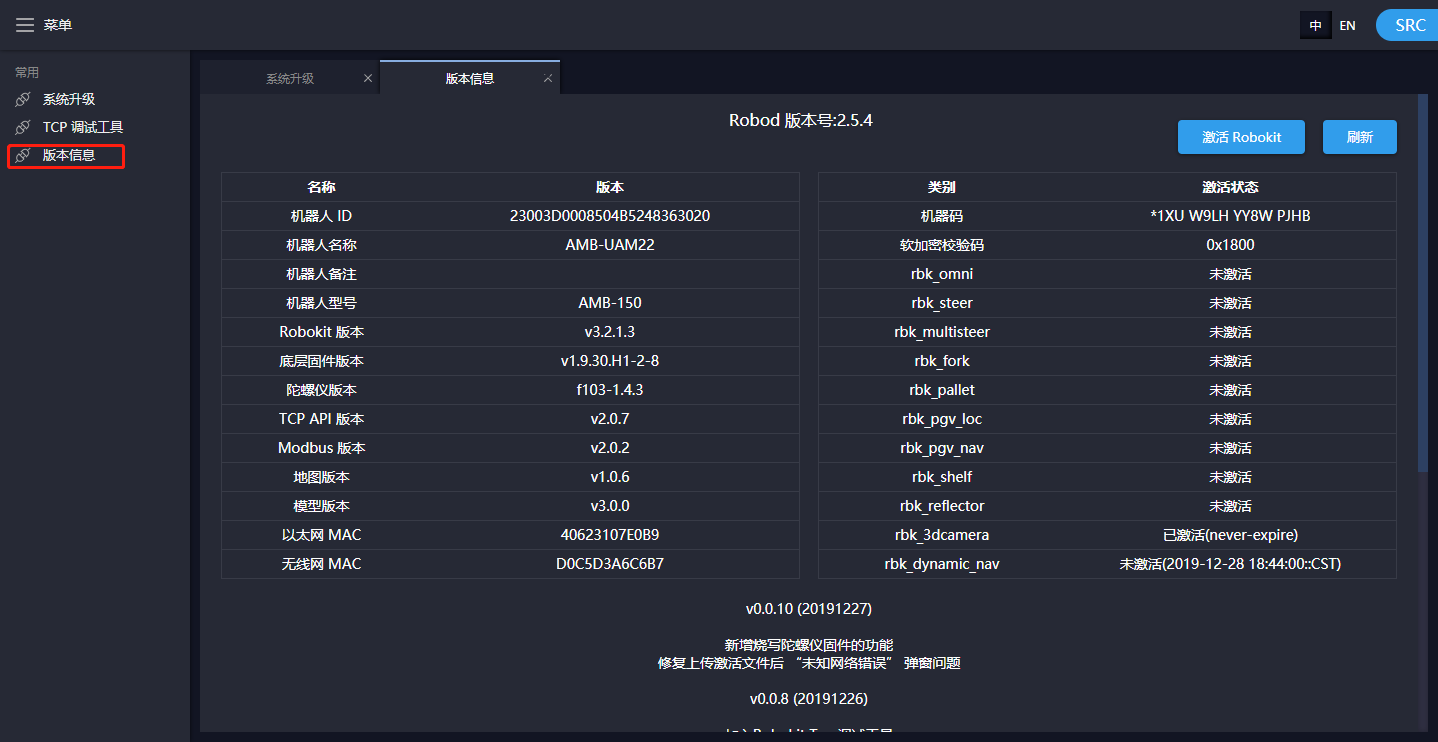
2.左侧点击【版本信息】查看 SRC2000 当前版本信息,必要时候可以截图记录备份。
3.点击左侧【系统升级】进入升级界面。
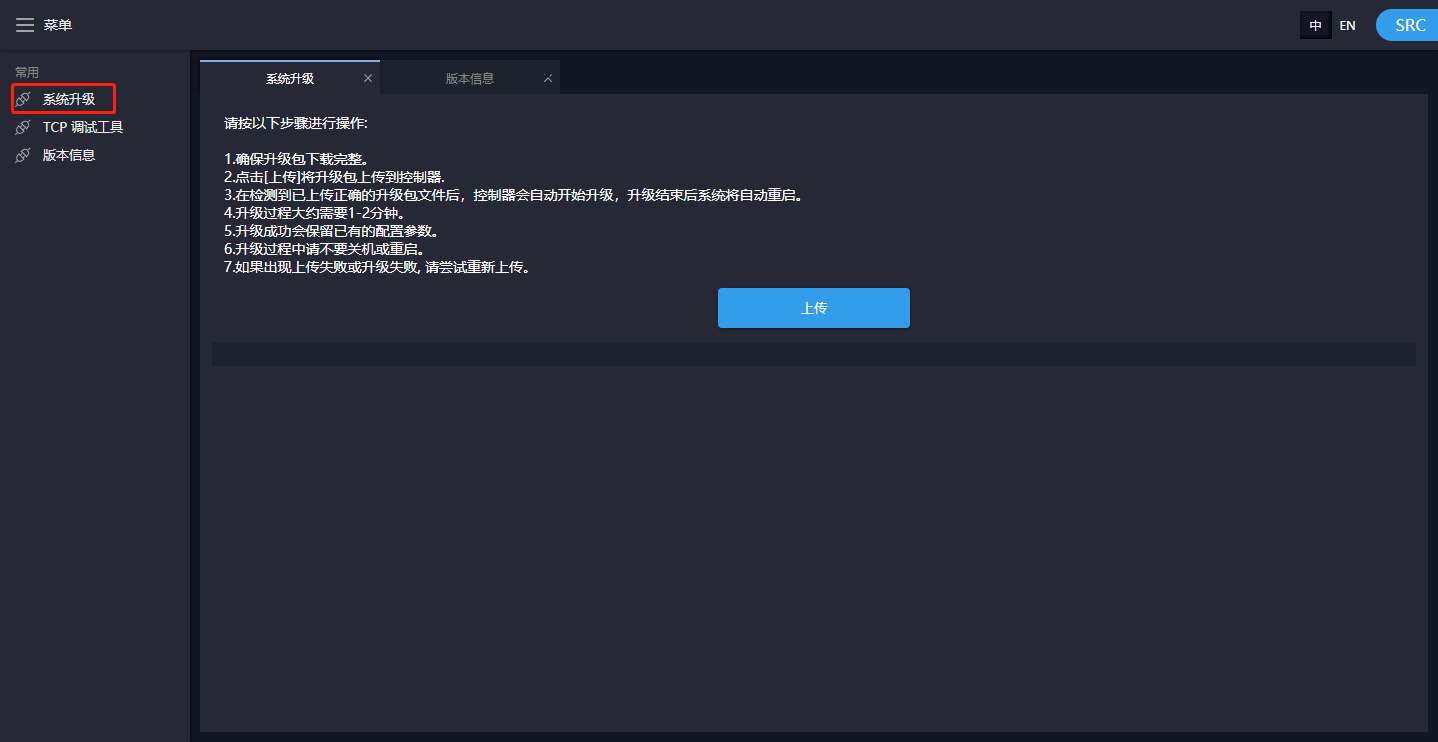
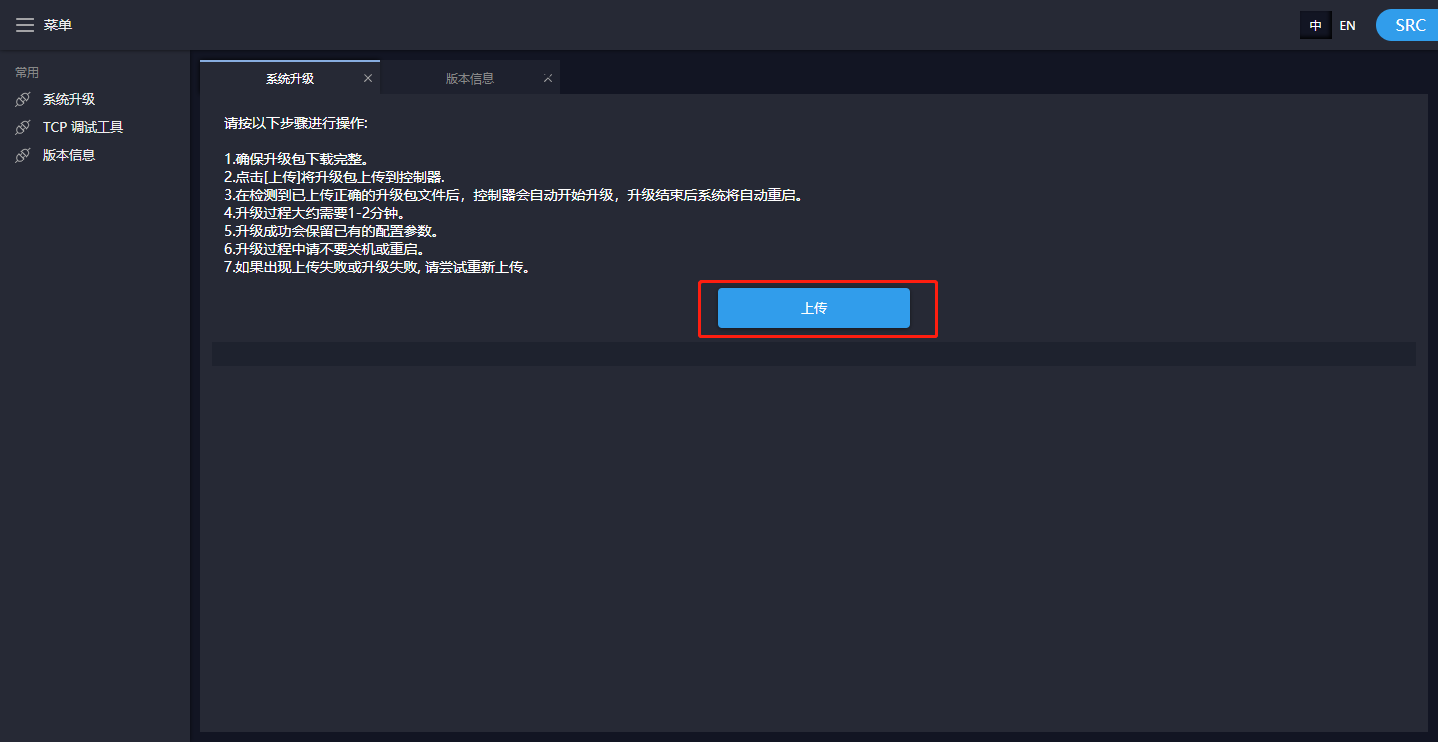
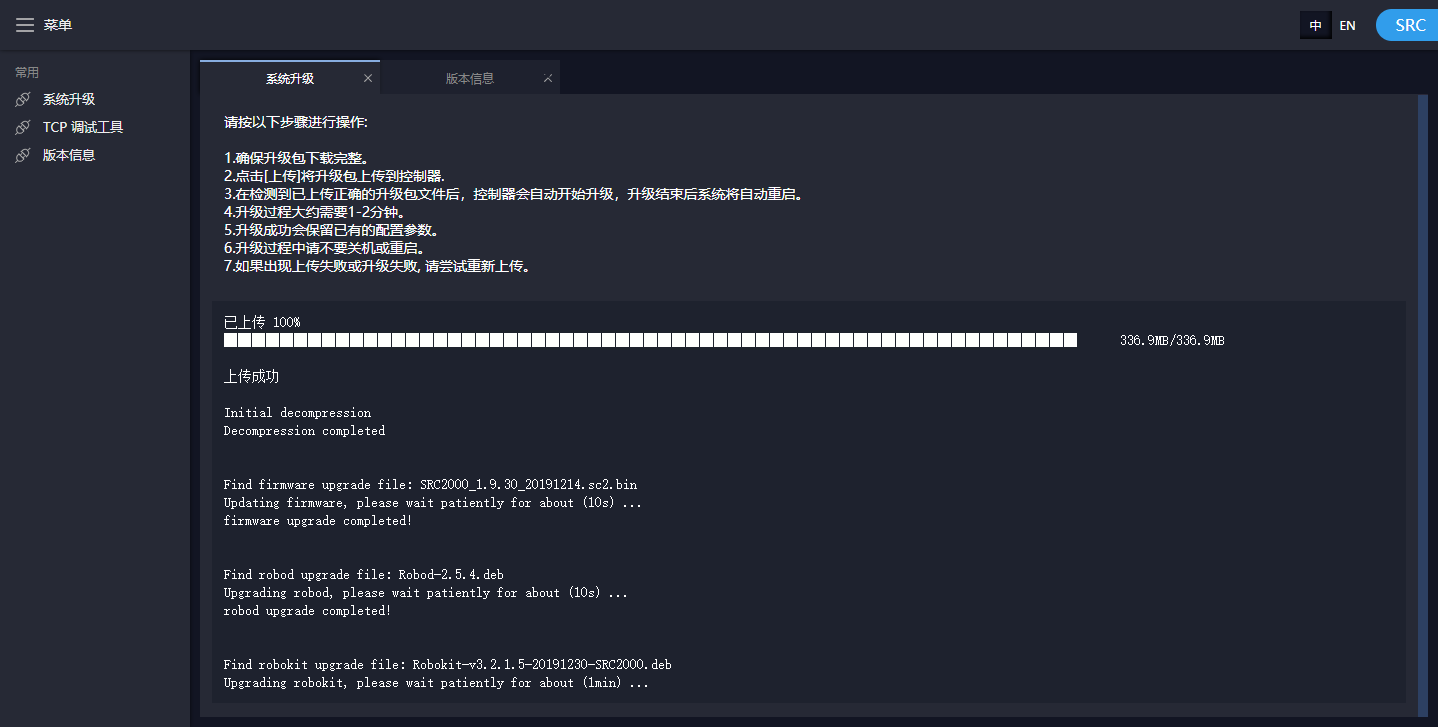
4.点击【上传】按钮。
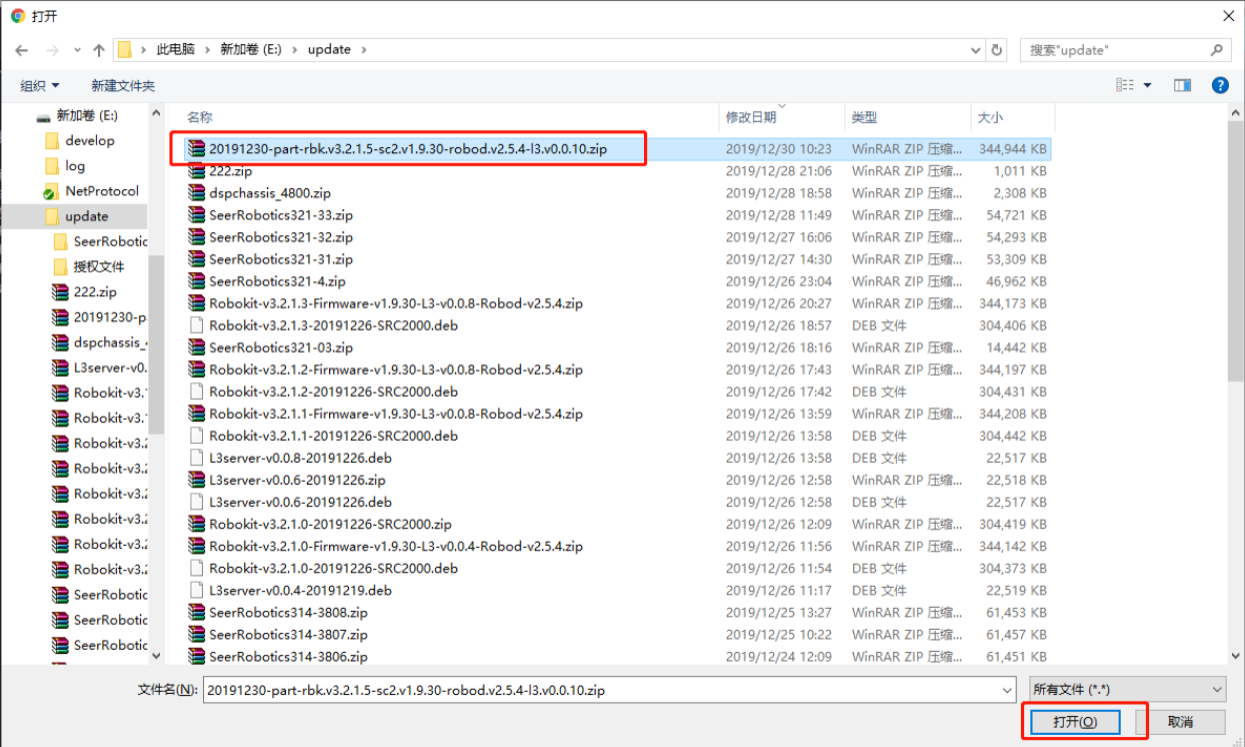
5.在跳出的 windows 资源管理器中,找到从我司获取的升级包,选择后点击【打开】按钮,文件包将会自动上传并安装。
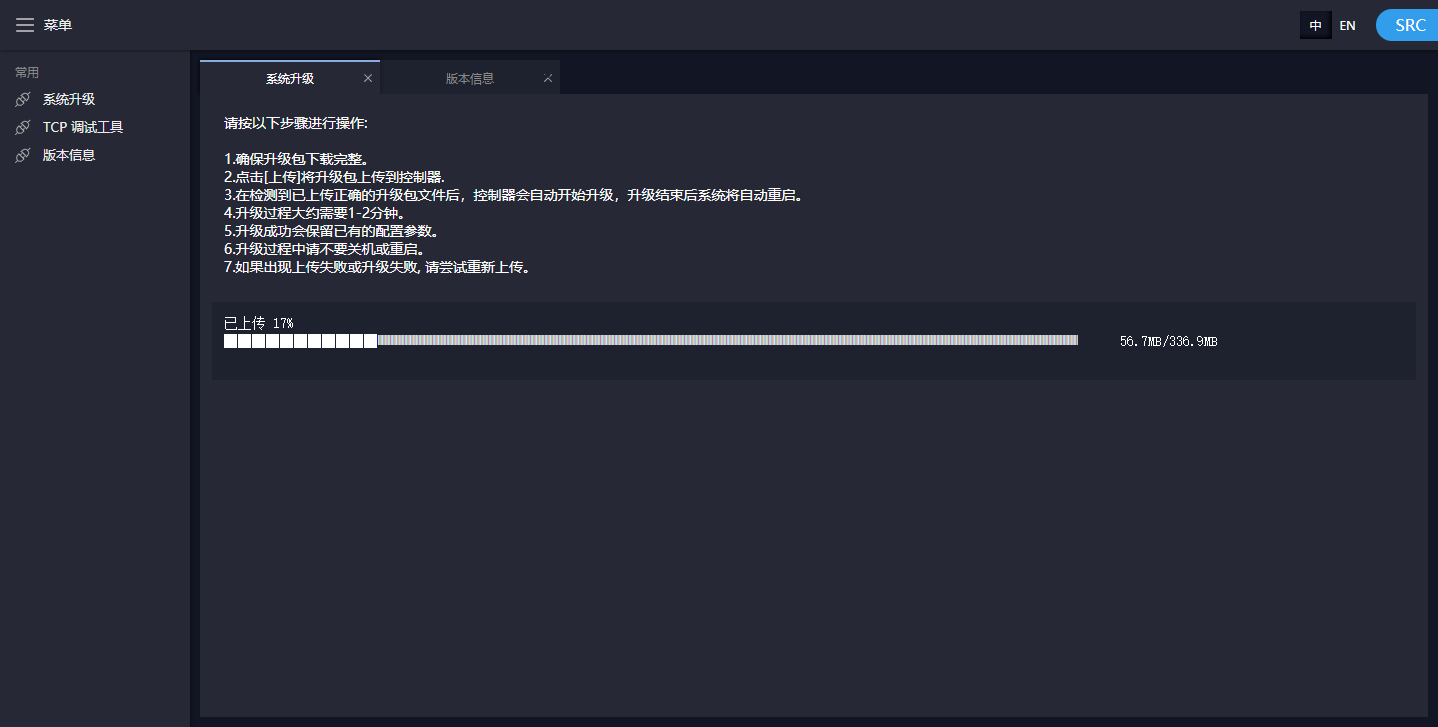
6.等待 SRC2000 升级,升级成功会有提示,过程中机器人可能多次重启,若是通过无线网络升级,提示可能会显示不全,但可以通过步骤 7 确认是否升级成功。
7.升级完成后,点击【版本信息】查看版本是否已经更新成升级包中的版本(和升级包名字一致)。

四、高级功能授权 TODO
使用 PLC 做 ModbusTCP I/O 扩展说明
2021年6月2日 更新
编辑作者:Seer Technical Support
编辑时间:2019 年 6 月 22 日
联系邮箱:support@seer-group.com
文档版本:v1.0.2
一、使用场景
对于主控扩展 I/O 数量有更多要求的客户可以使用支持 Modbus TCP 协议,通过网络链接进行 I/O 扩展。
二、Roboshop配置
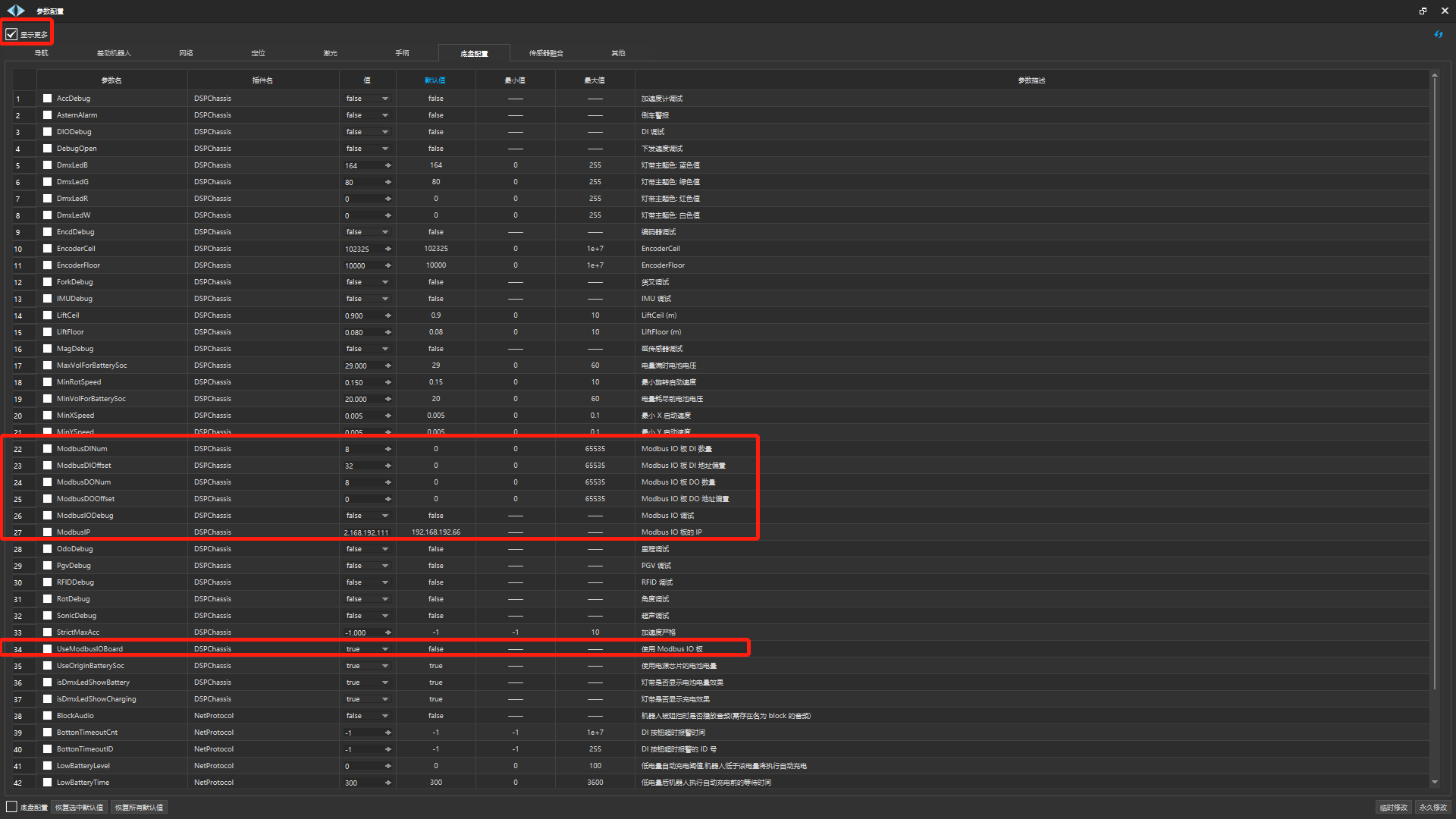
- 参数 ModbusDINum 配置为扩展设备 DI 数量
- 参数 ModbusDONum 配置为扩展设备 DO 数量
- 参数 ModbusDIOffset 配置为扩展设备 DI 地址偏置
- 参数 ModbusDOOffset 配置为扩展设备 DO 地址偏置
- 参数 UseModbusIO 配置为 true 则启用扩展设备
三、机器人模型配置
3.1 扩展DI设置
1.上述roboshop参数配置完成后,在模型文件中找到DI设备类型。如下图,右单击设备即可添加新的DI设备。(可添加需要使用的DI,不使用不需要添加。)
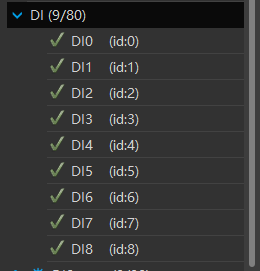
2.单击DI设备,在右侧的属性窗口中,更改id。Modbus id的范围如下图提示,即在roboshop参数中设置的扩展DI数量按照17-80序号进行排序。
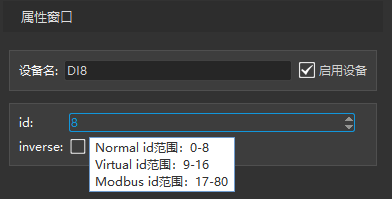
3.inverse属性为DI的高低电平反转设置。
4.功能配置可见DISensor设备及Trigger设备。
3.2 扩展DO设置
1.上述roboshop参数配置完成后,在模型文件中找到DO设备类型。如下图,右单击设备即可添加新的DO设备。(可添加需要使用的DO,不使用不需要添加。)
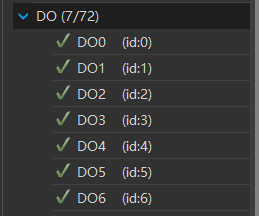
2.单击DO设备,在右侧的属性窗口中,更改id。Modbus id的范围如下图提示,即在roboshop参数中设置的扩展DO数量按照8-71序号进行排序。
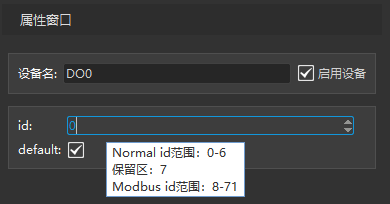
3.default属性为DO的在控制器上电时的首次状态。
4.功能配置可见IndicatorLight设备。
四、设备配置
- 配置扩展设备 IP 至 192.168.192.XX 网段,一般使用192.168.192.66
- 标准的 Modbus TCP 协议的端口是 502;
五、应用案例――使用 PLC 作为 Modbus TCP 的扩展 I/O
5.1 原理概述
5.1.1 为什么使用 PLC 进行 Modbus TCP 的 I/O 扩展?
首先选用支持 Modbus TCP 的 PLC 进行扩展;其次因为 PLC 在执行机构的稳定性和网络延迟方面具有不可忽略的作用;PLC 在 I/O 上扩展上具有可插拔的特性,可以随时进行扩展。
5.1.2 PLC 的选择要求
首先 PLC 需要支持 Modbus TCP 通讯,且 I/O 点在 Modbus TCP 的地址上必须是连续的;其次 PLC 的以太网可以进行 IP 地址和端口修改,而不是只能使用出场的默认地址+端口号;对于长时间开合的 DO 信号尽量选择晶体管输出类型;尽量选用对 PNP/NPN 输入传感信号都支持的型号。
5.2 推荐 PLC 选型
5.2.1 台达系列 DVP26SE11T/DVP12SE11R
概述: DVP26SE11T 是是一款小型网络型 PLC,12DO/14DI,支持 Modbus TCP/RTU 通讯以及串口通讯协议,产品截面数据图如下:
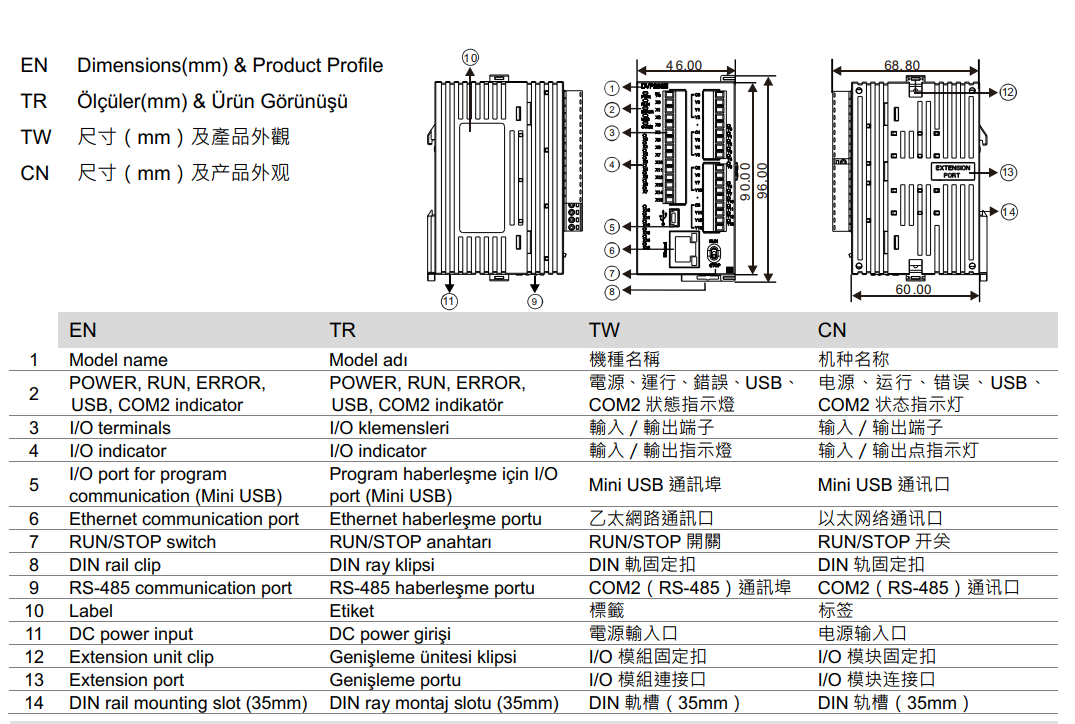
对于体积要求过高的客户可以考虑使用。
配置说明:
1.IP 设置,该款 PLC 出厂的时候已经配置好了网络 IP,所以对于 IP 和网端有要求的客户需要使用台达官方提供的设置软件(DCISoft)修改静态 IP,连接如下:
http://www.delta-china.com.cn/services/DownloadCenter2.aspx?secID=8&pid=1&tid=1&CID=06&itemID=060301&typeID=1&downloadID=,&title=--%20%E8%AF%B7%E9%80%89%E6%8B%A9%20--&dataType=8;&check=1&hl=zh-CN
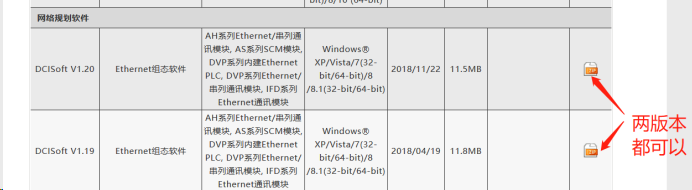
在下载的网页中找到如图如上图片进行软件的下载,下载完成后直接进行安装。
安装完成后在软件的运行界面中依次按照下图进行操作,在步骤3中就可进行静态 IP 的设置,点击确认即可;(注:首次链接的时候保证 PC 的 IP 静态地址是 192.168.1.**,因为 PLC 的默认 IP 是192.168.1.5)
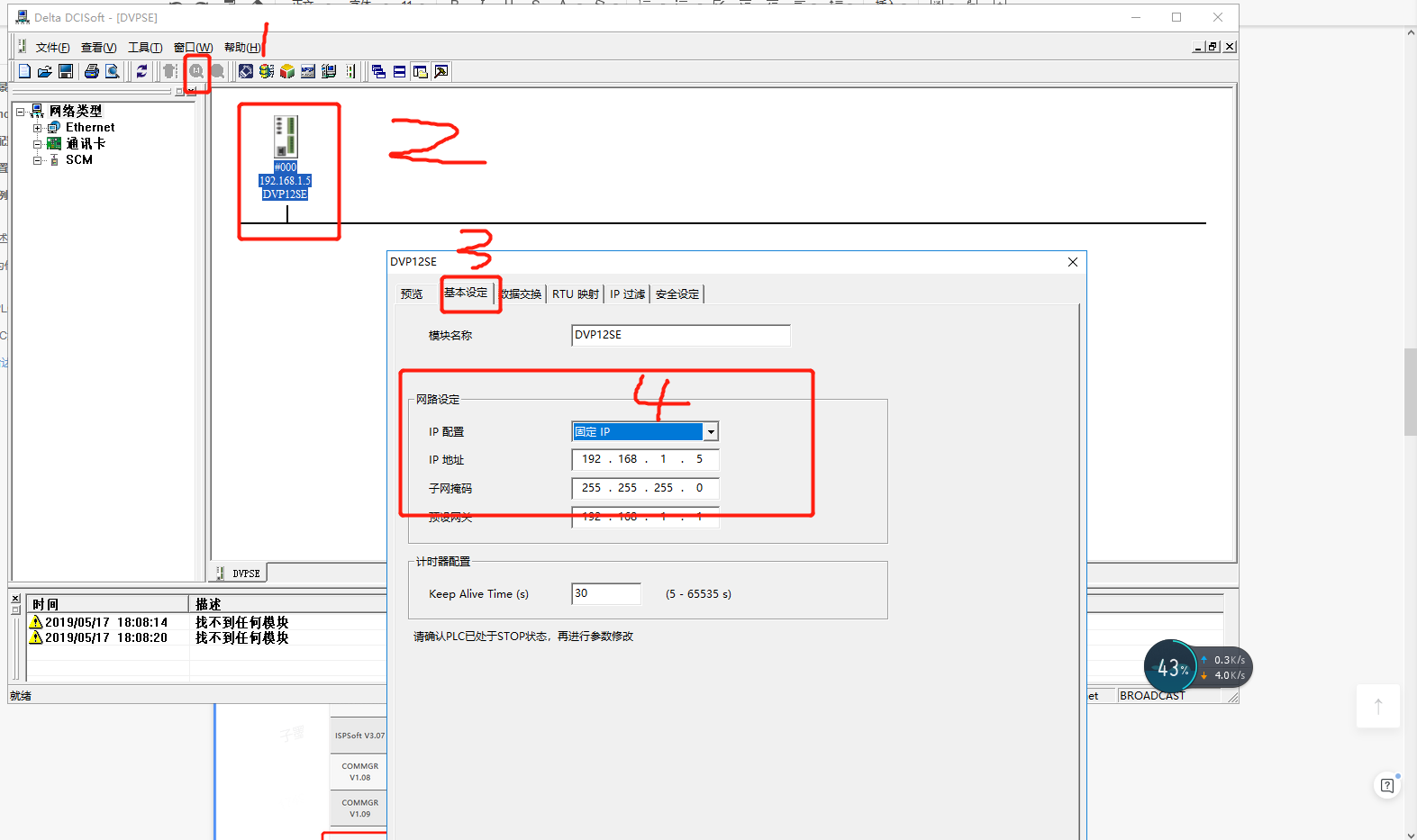
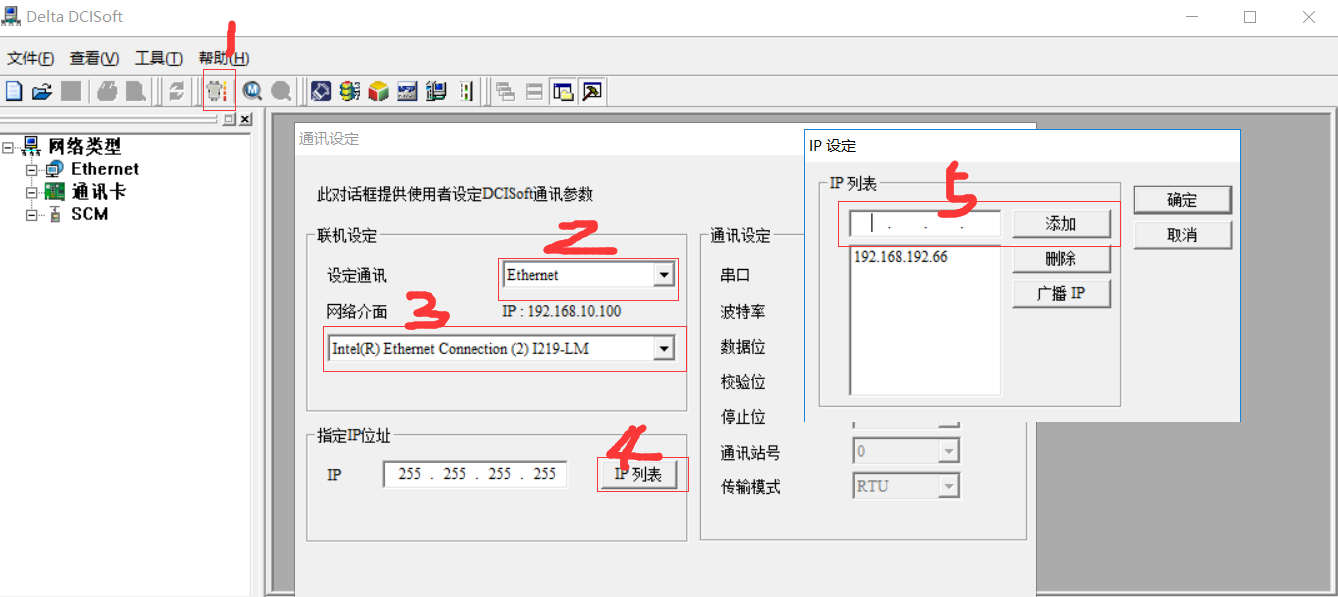
如果上述方法不能刷新出网络配置,使用下图步骤进行 IP 添加,设置步骤如下:
2.PLC 程序的编写和下载
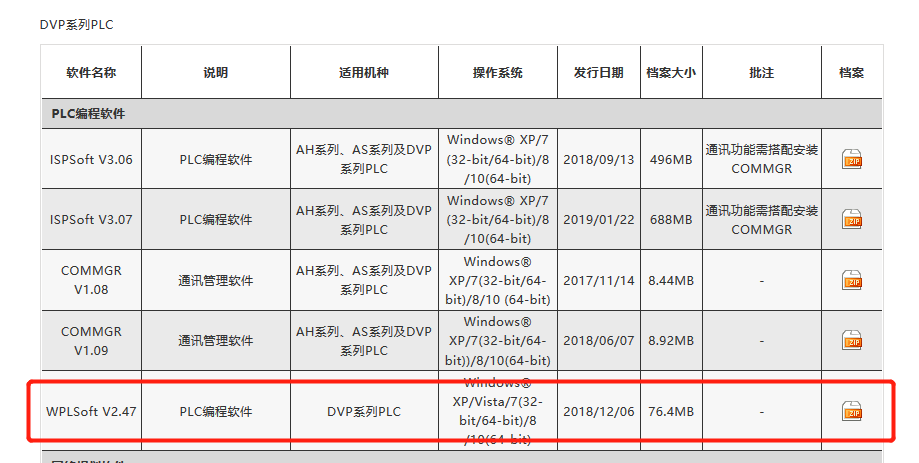
需要使用台达 PLC 的编写软件进行 ModbusTCP 通讯,软件下载地址和 PLC 编程软件的下载地址相同。
程序如下:
Dvp-tcp.dvp0.2MB
在上述的下载链接中下载如下图的软件并进行安装。
安装完成之后如下如的快捷方式:

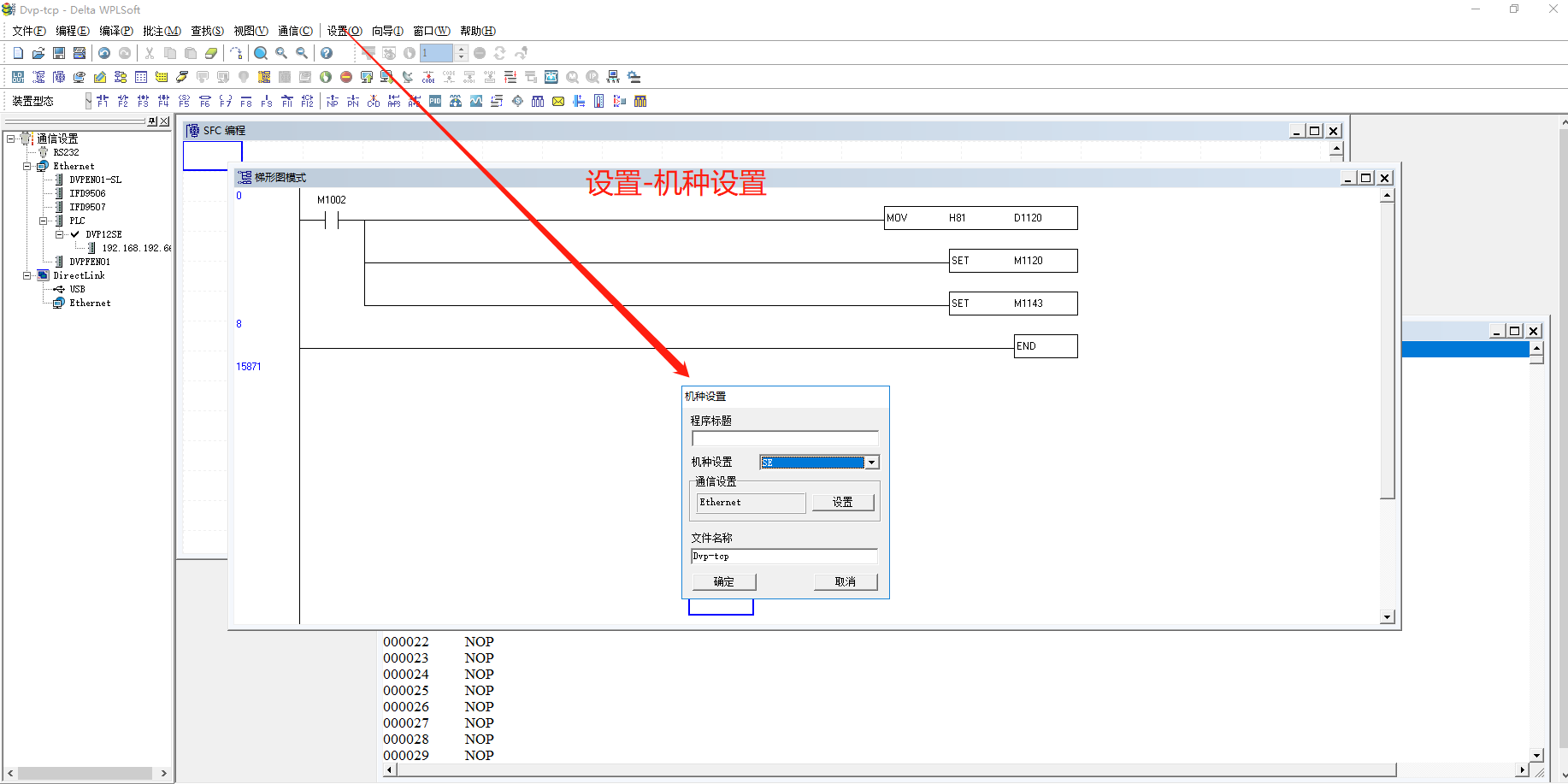
运行软件之后如下图操作:
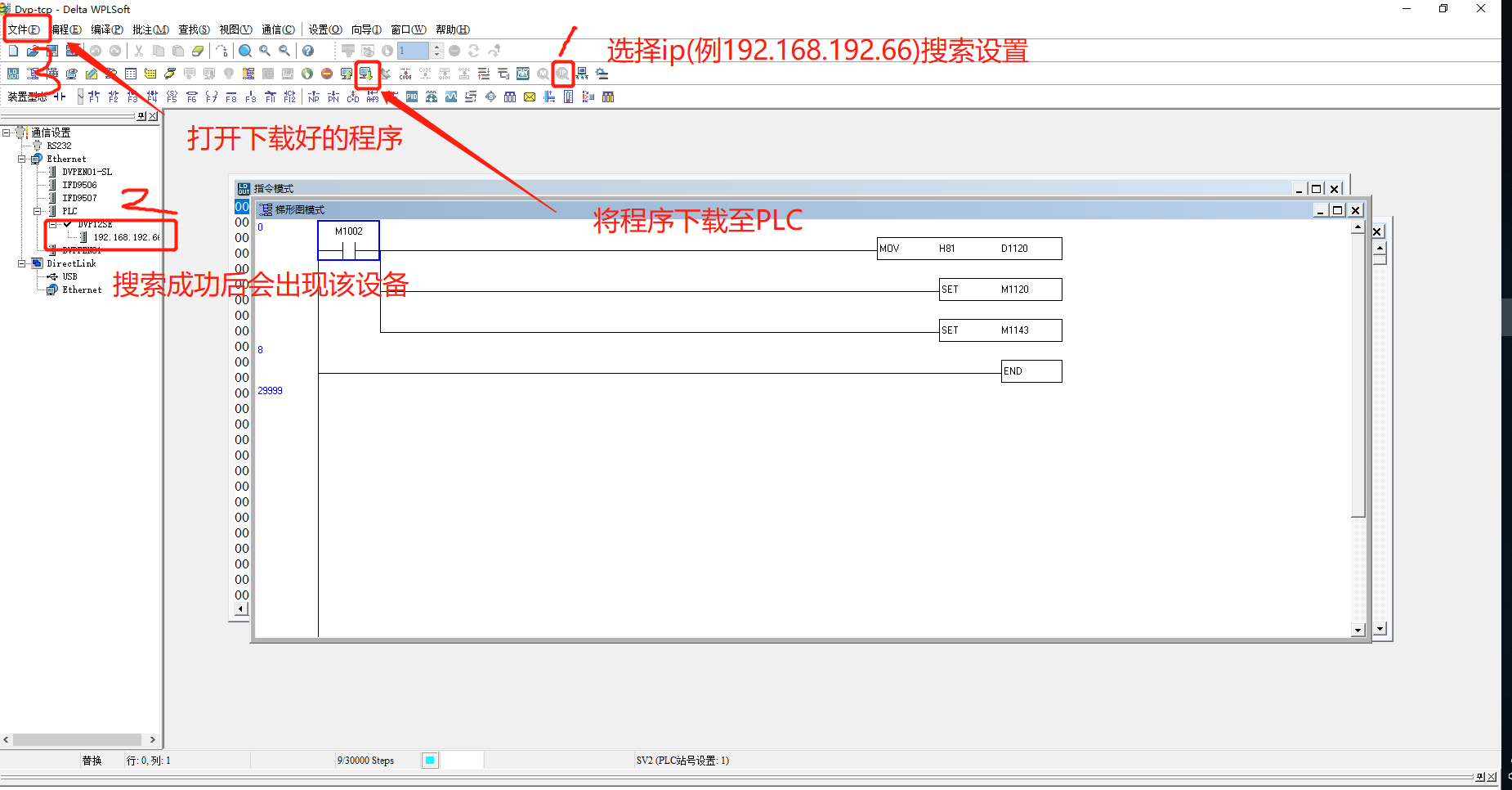
注: 如果过程中出现 PLC 与记忆容量不符合的情况请设置机型为 SE 再下载程序到 PLC,如下图。
3.IO 说明
DVP26SE11T/DVP12SE11R 系列对应的 ModbusTCP 只读/读写位,需要在 Roboshop 中进行地址映射,配置方法如下图所示:

注1:台达 DVP(26/12)SE 系列的 Modbus TCP 地址如上所示,但是由于系列不同或者品牌不同会导致这个起始地址发生变化,所以在换非我司提供的选型时候就需要您咨询 PLC 供应商获取 ModbusTCP 对应的输入输出地址。
注2:如果 PLC 的本体使用的点数任然不能够满足需求,此时需要在 PLC 本体上加入扩展 I/O,此时需要注意,这个地址并不是顺延的,例如 DVP12SE 系列的输入/输出分别是8/4口,如果您想分别加入8个点的输入和输出模块各一个的话,这个时候在 Roboshop 中配置的modbusDInum>8+8+8(第一个8代表 PLC 本体的X0至X7,第2个8代表X8至X15。
注3:台达 PLC 将 Modbus 起始地址的输入/输出的前16位给 PLC 本体使用,不管 PLC 本体有没有16个点。所以针对上述的 DVP12SE 来说这个8就算在 Roboshop 中配置了也没有实际操作意义;但是如果您选择的本体是 DVP12SE 您又想使用扩展模块就必须要这么使用,最后这一个8就代表8输入的DI模块的点数,modbusDOnum>28,与上述 DI 配置的说明相同。
5.2.2 西门子S7-1214C(6ES7 214-1AG40-0XB0)
概述:
西门子s7-1200系列作为西门子中小型 PLC,14 个 24V DC 数字输入;10 个 24V DC 数字输出。自带 PN 口并且支持 ModbusTCP,产品尺寸为(110mm*100mm*75mm)
配置说明
1.软件环境
a).下载地址
软件必须使用 TIA 13 sp1 以上版本(因为只有这个版本以上才支持 ModbusTCP 的 client 和 server 的通讯模块),可以从西门子官方网站进行下载,也可以通过第三方的应该进行下载(百度网盘:地址:https://pan.baidu.com/s/1tvjvWpzGpfmMZKF0xiDb2A 提取码:ax28 );下载之后需要使用第三方破解秘钥来授权使用 TIA 软件,授权的下载地址(百度网盘:https://pan.baidu.com/s/1GJ-gASoSyEVhlAgY-tm5aA 提取码:9xu6)。
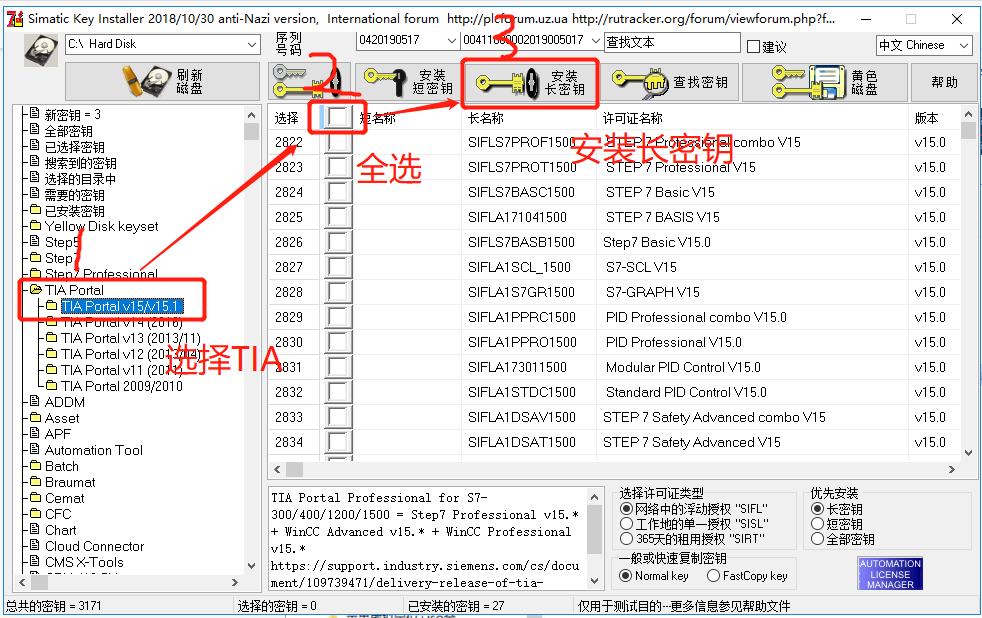
2.TIA 15 软件的安装和授权
软件的安装过程中可能出现错误,请自行百度,里面讲述的非常详细,这里就不在赘余了。
授权文件下载好了之后的操作如下图:
3.PLC 的组态和编程
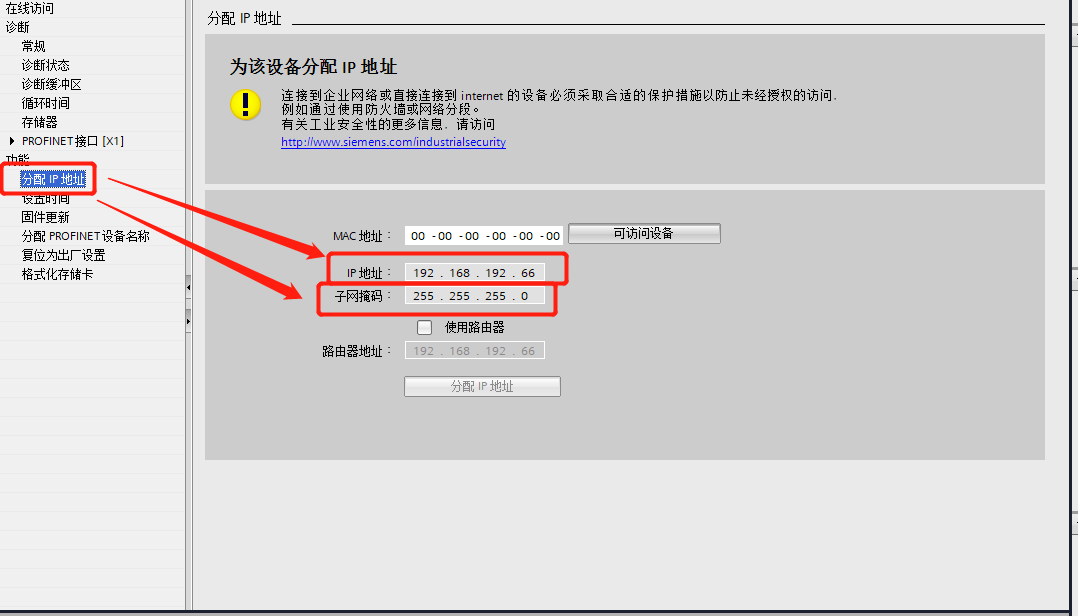
注:s7-1214c的出厂 IP 是0.0.0.0,主控 SRC 默认的外部扩展 I/O 的地址是 192.168.192.66,这个需要在 TIA 中进行组态设置;程序已经写好,在 TIA 中进行归档操作即可使用,程序如下:
Modbus TCP_V15.1.zap15_10.7MB
(说明:这是一个博图 v15的程序,如果您安装的是非v15版本,请自行百度如何打开)
具体的组态和操作流程如下图:
a).软件安装完成之后回出现一下四个快捷方式,按图中的红框运行:
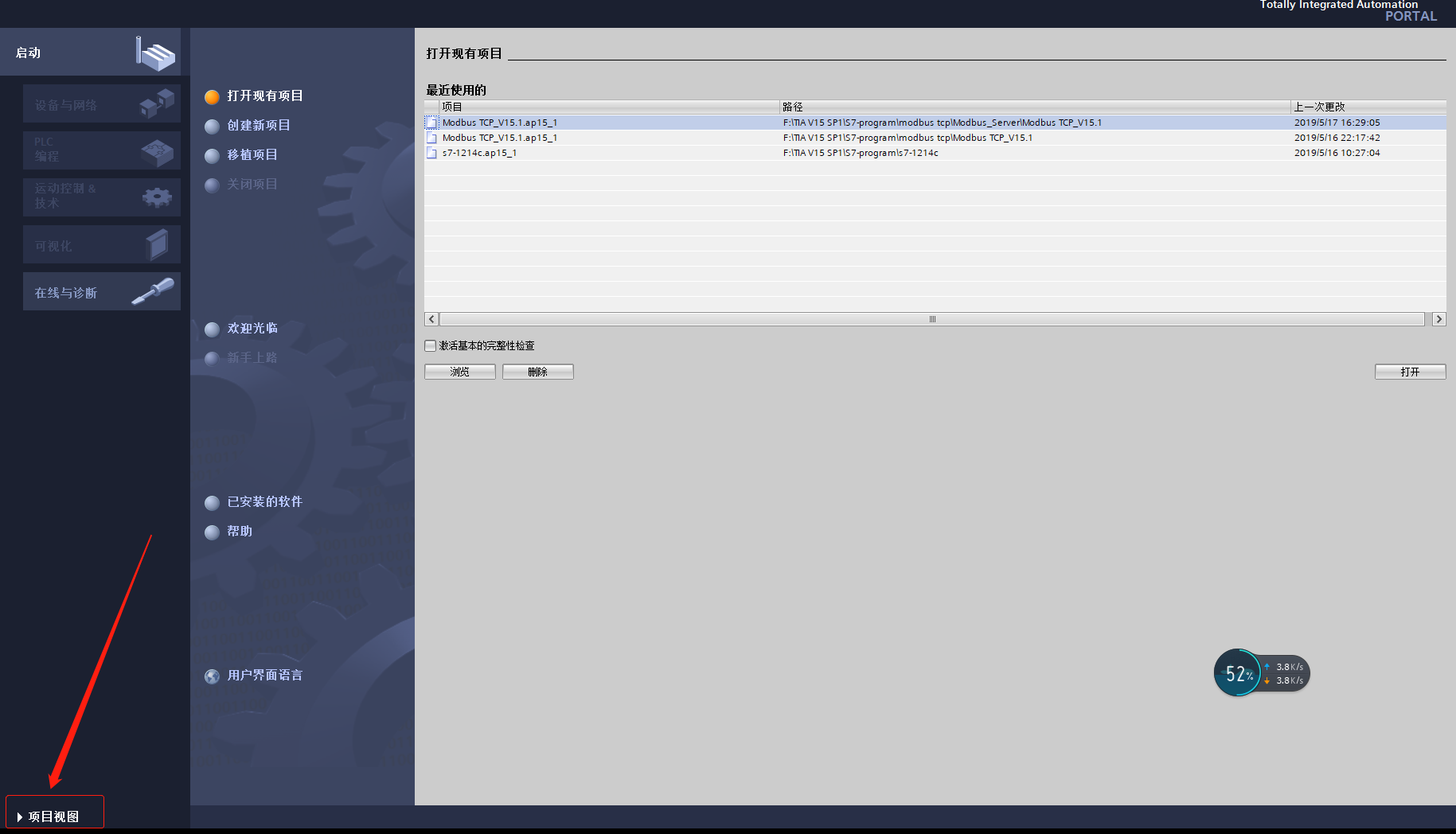
b).点击项目视图
c).【项目】-【恢复】 恢复程序(解压程序)
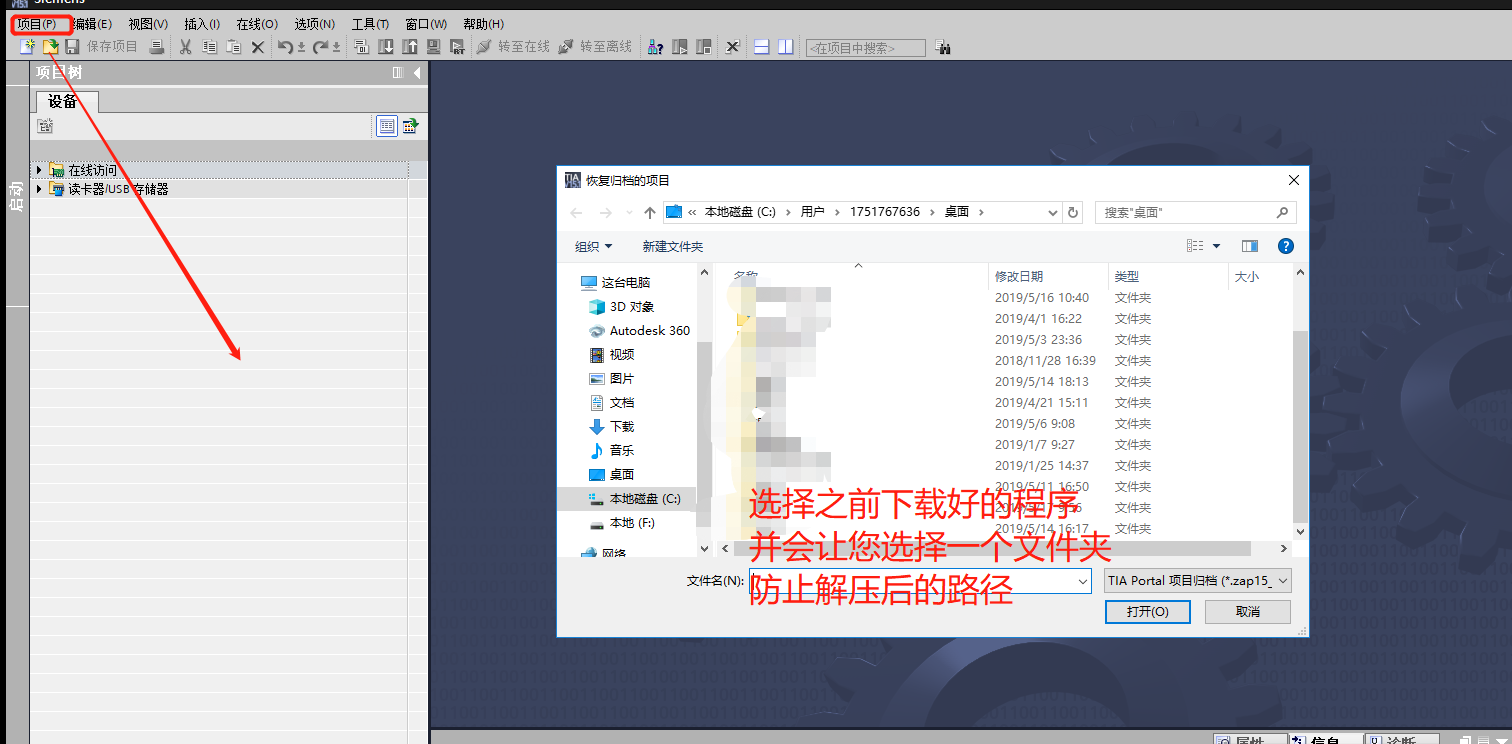
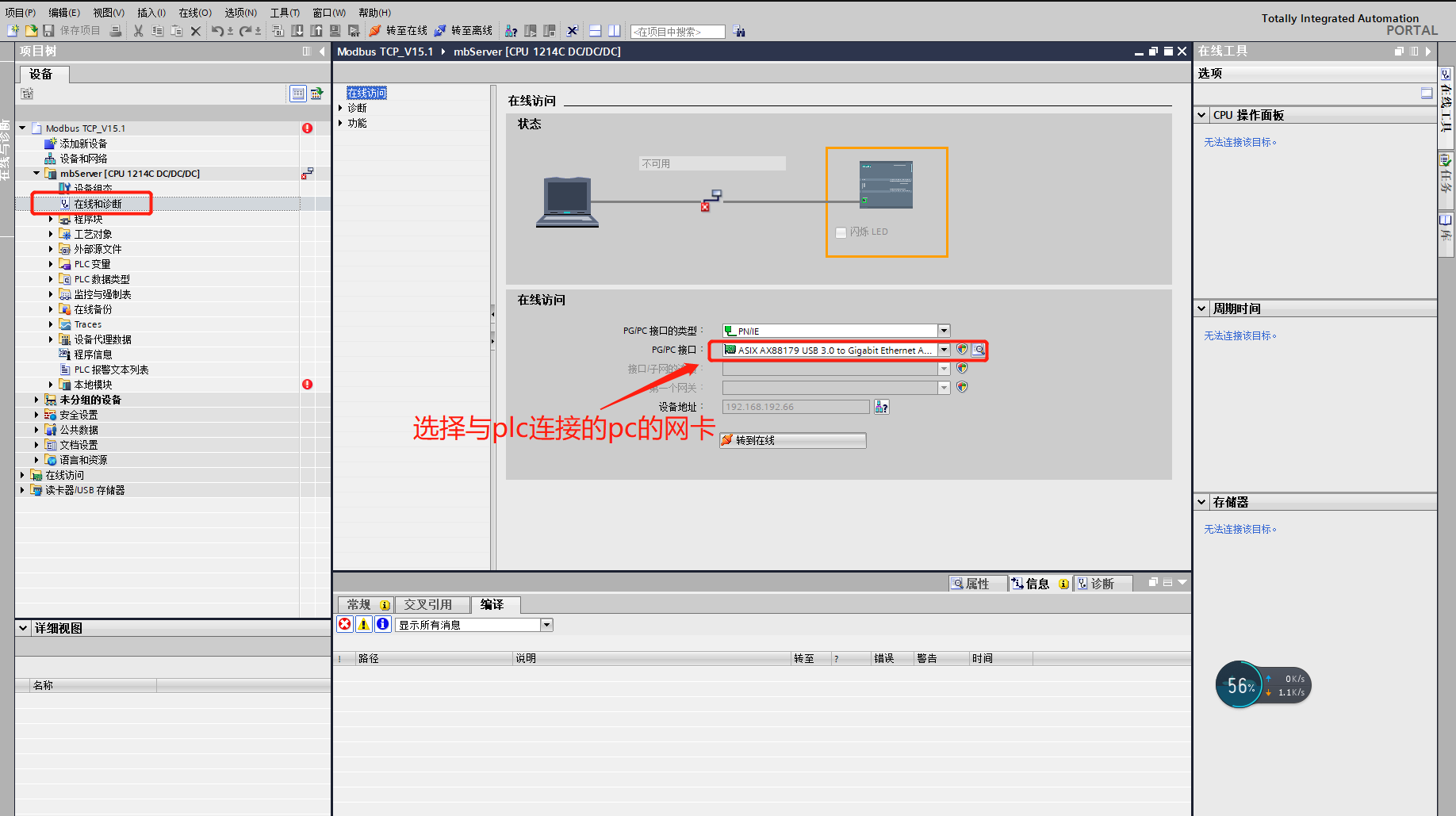
d).【Modbus TCP_V15.1】-【mbSserver[CPU 1214C DC/DC/DC]】-【在线和诊断】网络组态(设置ip和子网掩码)
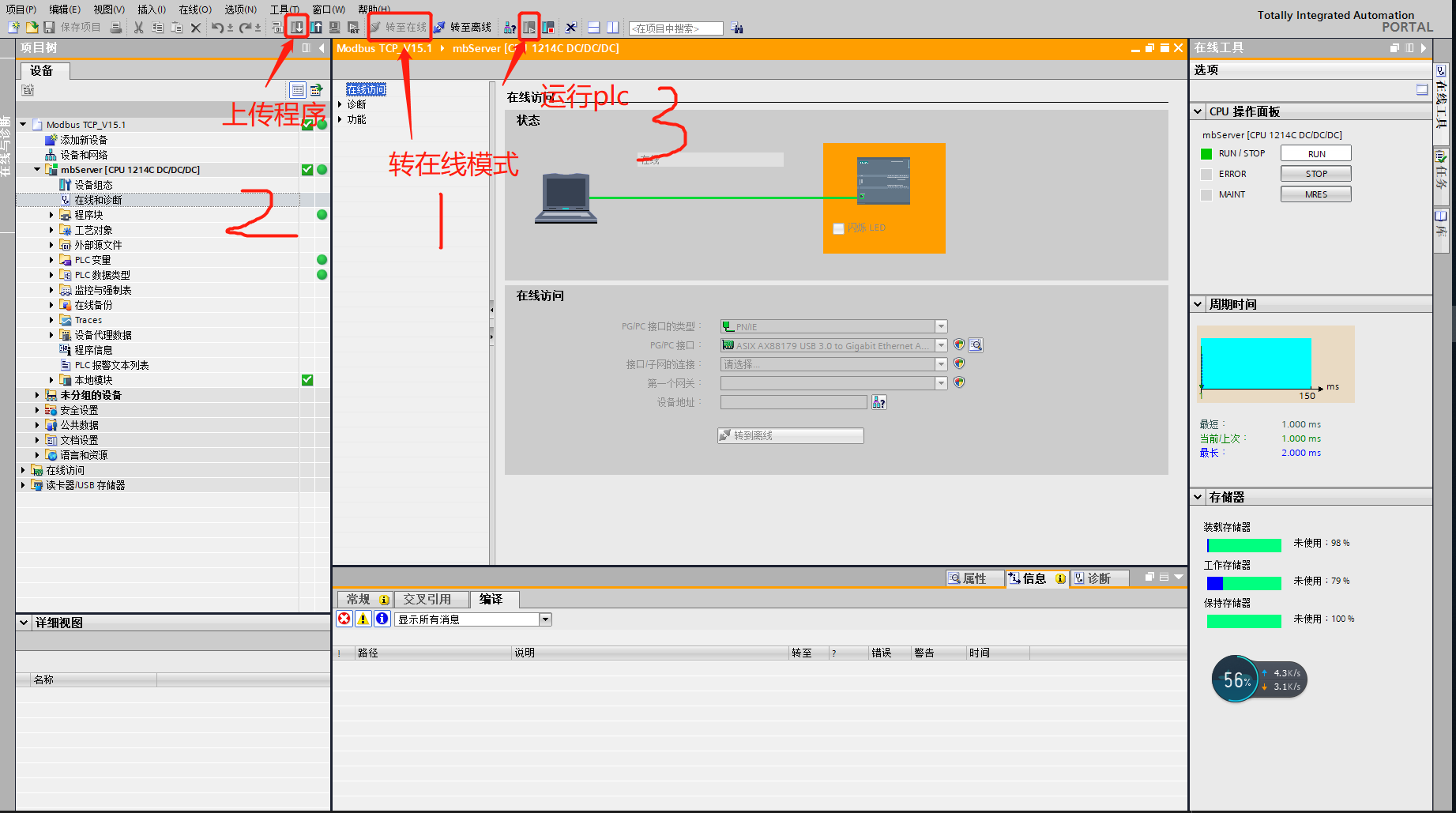
点击转至在线,并将程序和组态下载至 PLC,顺序必须按照下图操作:
e).Roboshop 中 I/O 地址配置如下,其他配置参见本文开头

六、接线图实例
6.1 SIEMENS S7-1214C 与北洋 UST-05LN 激光传感器接线方式
如下图所示:
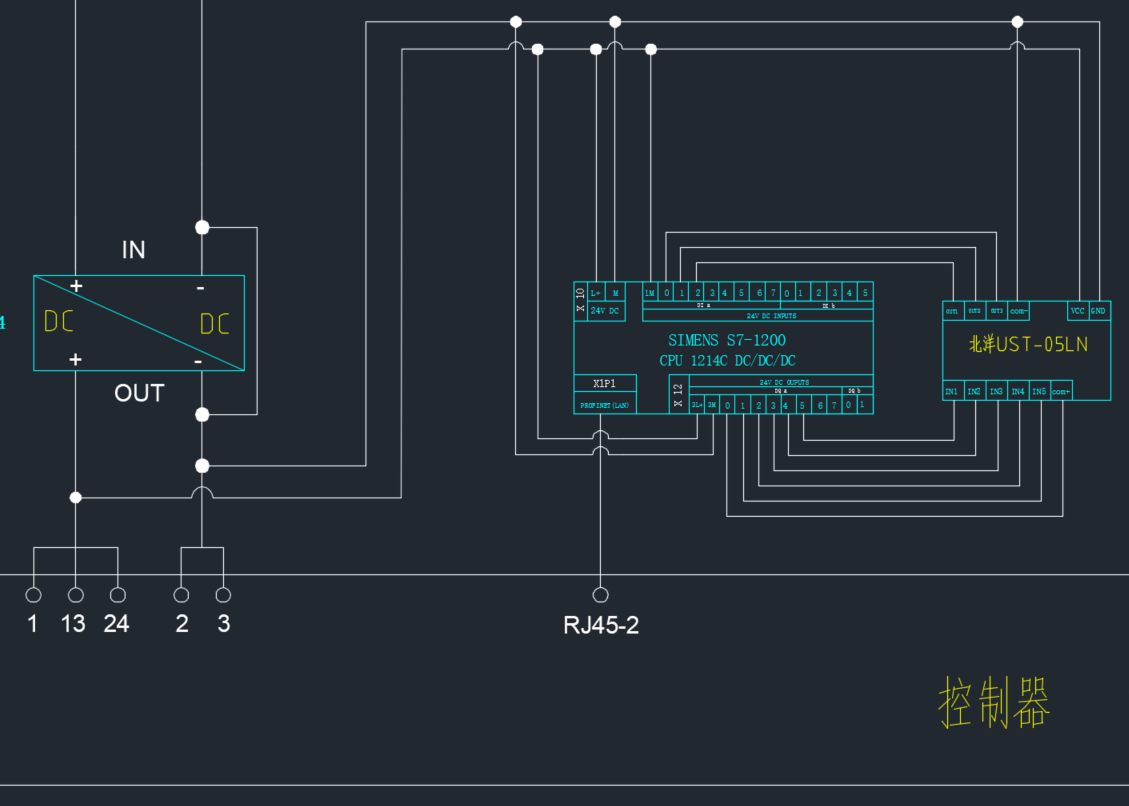
注1:此款传传感器的com+端要接入24V高电平,对应PLC DQa 0要始终保持24V高电平输出;
注2:若激光传感器不需要自动切换区域,则不需要外接input1-5及com+等端口。
6.2 SIEMENS S7-1214C 与 SICK TIM310 激光传感器接线方式
如下图所示:
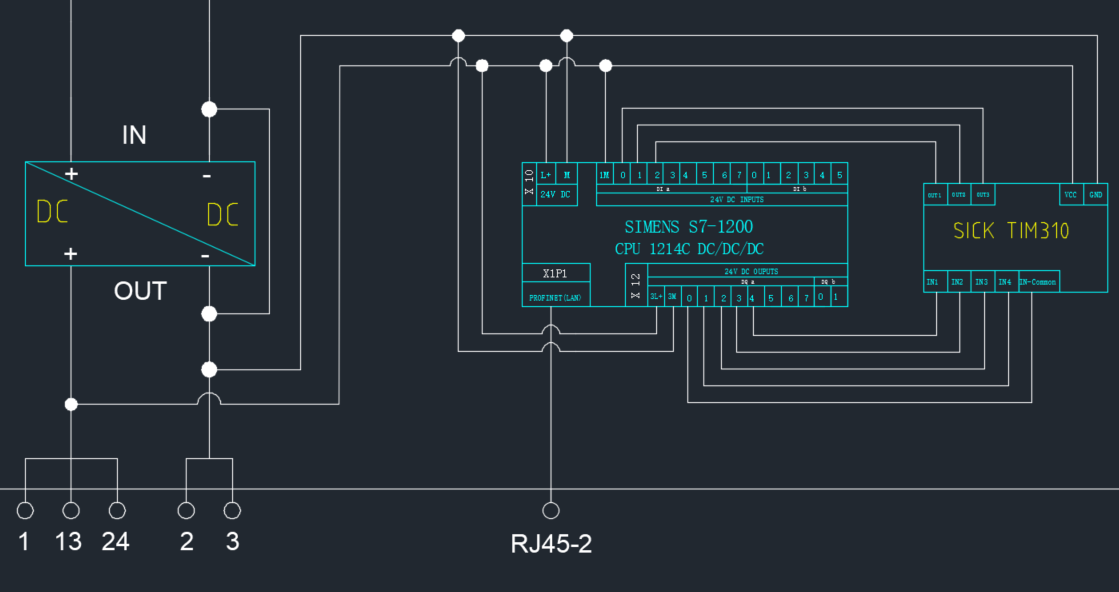
注1:Tim310 传感器的 IN-Common 端要接入24V高电平,对应 PLC DQa 0 要始终保持 24V高电平输出;
注2:T若激光传感器不需要自动切换区域,则不需要外接 input1-4 及 IN-Common 等端口。
6.3 DELTA DVP 12SE R 与 SICK TIM310 激光传感器接线方式
如下图所示:

6.4 DELTA DVP 12SE R 与 UST-05LN 激光传感器接线方式
如下图所示:
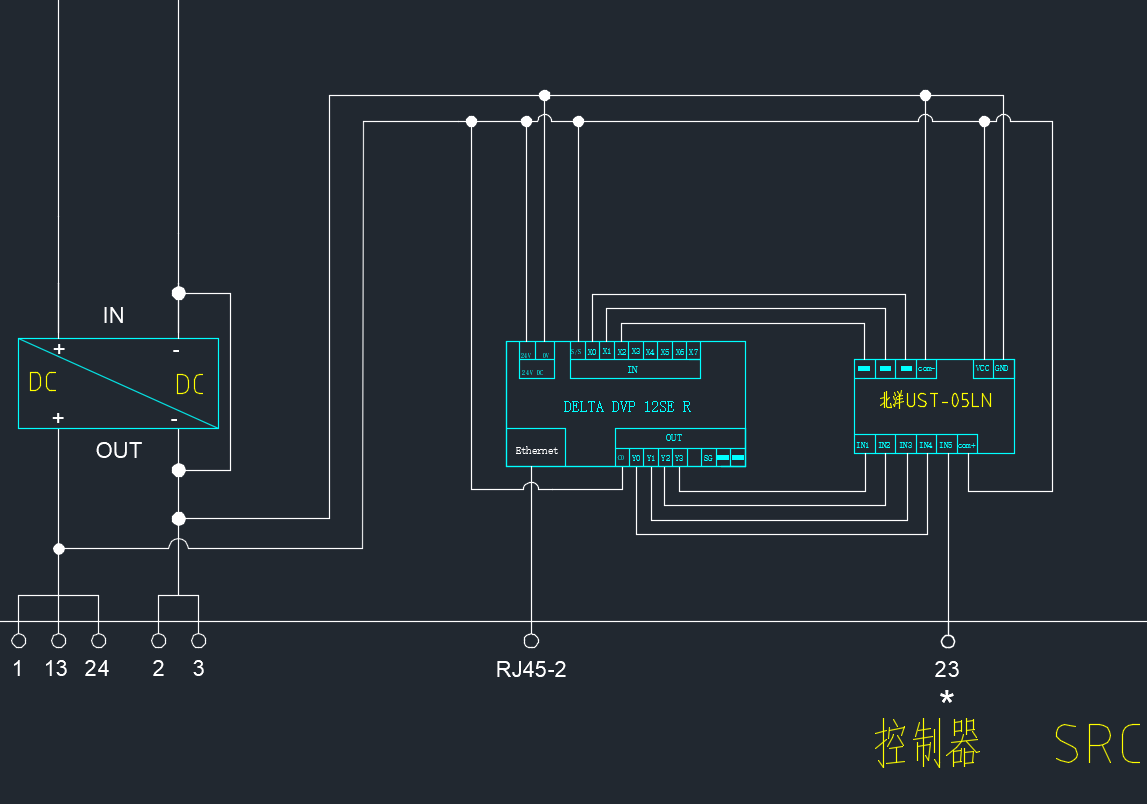
注1:Tim310 传感器的 IN-Common 端要接入 24V 高电平。
注2:若激光传感器不需要自动切换区域,则不需要外接 input1-4 及 IN-Common 等端口。
注3:由于台达 12SE 这款 PLC 的 DO 口仅有4个,不够用,所以将激光传感器 IN5 接入核心控制器PDO1(T23的23号线)。
七. 附件
PLC 的接线说明(注:文档只有电气接线参考,有的也有尺寸等信息,具体的使用可至官方网站进行详细的资料下载)
台达系列:DVP26SE11T
DVP_26SE11T.pdf0.6MB
DVP12SE11R
DVP_12SE11R.pdf0.9MB
西门子系列:1214C(6ES7 214-1AG40-0XB0)
S71200produkte.pdf10.6MB
ppp
机器人(适配HLS驱动器)改造作业指导书
2021年11月4日 更新
编辑作者:Seer Technical Support
编辑时间:2020 年 4 月 22 日
联系邮箱:support@seer-group.com
文档版本:v1.0.0
一、说明
本文档针对机器人自动化改造过程进行规范,使公司产品符合行业标准,保证产品质量稳定,使技术人员在进行改造过程中有章可循。
机器人自动化改造涉及传感器众多,建议采用我司标准核心控制器线束 TE23, TE35, 本文档以核心控制器标准线束为蓝本进行作业指导。
HLS 伺服驱动器选型建议参考公司的选型指导手册。
注:本文档只适用于改造参考,不可作为技术协议及其他承担责任的内容。
二、适用范围
本技术规范适用于公司使用森创驱动器进行自动化改造的研发、生产、调试的技术人员。
三、机器人坐标系
在机器人系统中, 存在两套坐标系, 分别为世界坐标系和机器人坐标系。世界坐标系为右手坐标系, 即地图的坐标系, 与地图和定位相关的操作均使用世界坐标系。
注:对于机器人本身的运动则需要参考机器人坐标系, 机器人坐标系为右手坐标系。
对于以差动方式运动的机器人来说, 机器人坐标系的原点即为两轮轴距的中心点, 如下图 3.1所示:
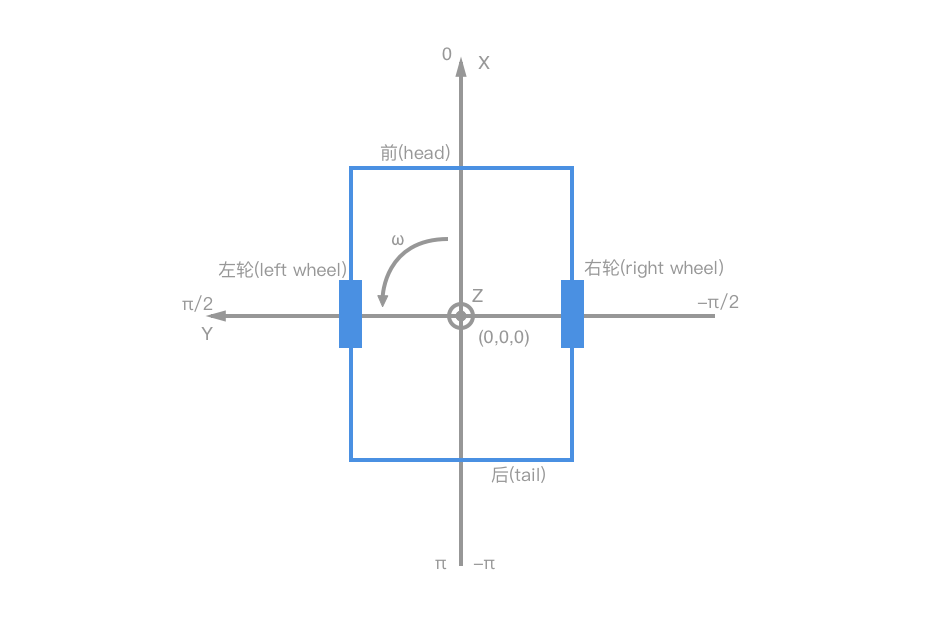
图 3.1
注1: 机器人坐标系的原点左侧使用的是左边的驱动器及对应电机,右侧使用的的是右边的驱动器及对应电机。
注2: 当我们说到机器人速度的时候, 一般情况下, vx 为机器人在机器人坐标系下的 x 轴方向的速度, vy 为机器人在机器人坐标系下的 y 轴方向的速度,w 为机器人在机器人坐标系下的角速度。
四、改造流程
4.1 机器人状态确认
1.熟悉机器人线路走向,对裸露的带电端子使用绝缘胶带包扎保证整机用电安全;
2.使用万用表测量车体外壳与电池负极之间的电势差,确认电池负极与整车外壳之间的电势差为零;
3.熟悉机器人机械布局,如:激光传感器安装位置,开机、急停按钮安装位置、驱动器安装位置、客户要求传感器安装位置等等;
4.熟悉 SRC2000 安装的电控柜内状况,确认电控柜内干燥、干净、无腐蚀性气体、无铁屑、无尘埃、无油气。
4.2 进行改造(底盘核心控制器部分)
4.2.1 SRC2000 核心控制器安装
1.使用 M4 螺栓将 SRC2000 核心控制器固定于控制柜内预留孔位,安装时使核心控制器底板与安装面紧密接触并且可靠固定;
2.分别将 TE35 中的 13、24、1、3、2 号线及 DCDC 引出线的 24V+、24V-剥去外皮 9-10mm。将 TE35 中的 13、24、1 号线(均为 24V 输入+)及从 DCDC 引出的 24V+插入同一个 WAGO 四口接线端子。将 TE35 中 3、2 号线(均为 24V 输入-)及从 DCDC 引出的 24V-插入同一个 WAGO 四口接线端子,如图 4.2.1 所示。
注:若核心控制器与 DCDC 距离较近,可以将 TE35 中 24V 输入+、24V 输入- (已经压配相应的 Y 型端子)直接接在 DCDC 的电源输出端。
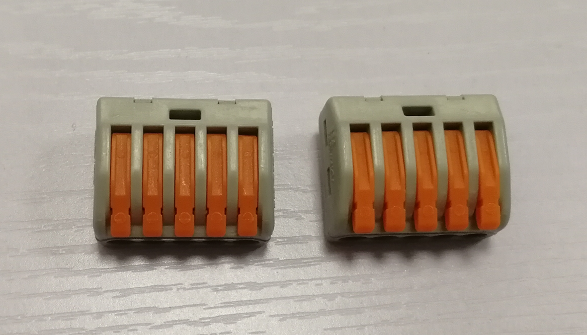
图 4.2.1
4.2.2 激光传感器安装
1.将激光信号线与激光电源线分别安装至激光传感器上 LAN 接口与 Power 接口,如图 4.2.2 所示;
2.将激光传感器安装至叉车顶部安装座,并将电源线、信号线按照预留通道引入电控柜,如图 4.2.2 所示;
3.将激光信号线 RJ45 接头接入核心控制器六口交换机;
4.将激光电源可由 SRC2000 核心控制器的 PDo5 提供,激光电源线中棕色线接 24V+,电源线中蓝色线接 GND.将这两根线剥去合适长度的外皮后分别压接德驰插管连接器,加装合适德驰母头后与 T35 线束中的 35、26 号线连接。
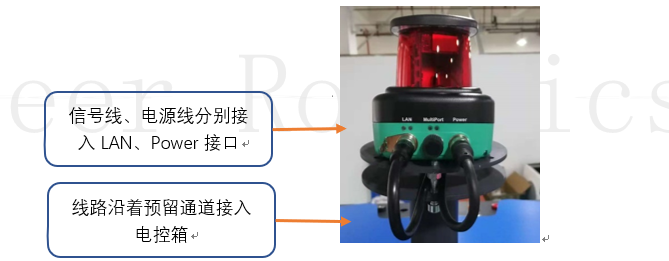
图 4.2.2
4.2.3 将开机按钮、急停按钮、报警灯分别安装至电控箱及面板相应开孔处,可靠固定。
4.2.4 开机、急停信号线路连接方式
开机按钮选择带灯自复位四触点开关(两个常开触点、两个常闭触点),推荐品牌:一佳 YJ139 急停按钮选择带灯常闭触点急停按钮,推荐品牌:和泉 YW1B 急停按钮。
1.根据机器人实际情况截取合适长度线路。与开机按钮连接的线头分别为:常开、常开、常闭 1、常闭 2、LED1+、LED1-,将这六根线两端分别打好相应线标,然后将线的其中一端分别压入连接器(Y 型 1.25-3),另一端除常闭 2、LED1- 压接 0510 端子外其余均分别压装德驰插管连接器;
2.根据机器人实际情况截取合适长度线路,与急停按钮连接的线头分别为:常闭 3、常闭 4、LED2+、LED2-,将这四根线两端分别打好相应线标,然后分别压入 Y 型连接器(Y 型 1.25-3),另一端除常闭 4、LED2-压接 0510 端子外其余分别压入德驰插管连接器;
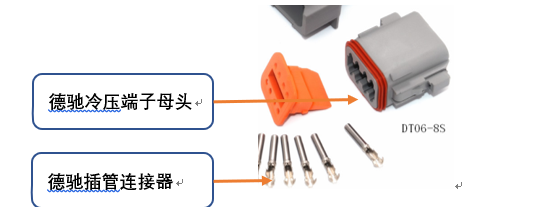
图 4.2.3
3.分别将开机按钮的常开、常开、常闭 1、常闭 2、LED1+、LED1-Y 型端子与开机按钮相应触点进行连接,如图 4.2.4 所示;
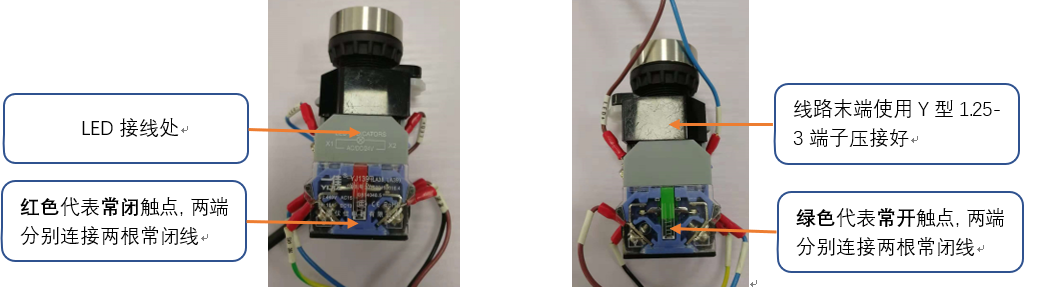
图 4.2.4
4.分别将急停按钮的常闭 3、常闭 4、LED2+、LED2-的 Y 型端子与急停按钮相应触点进行连接,如图 4.2.5 所示;
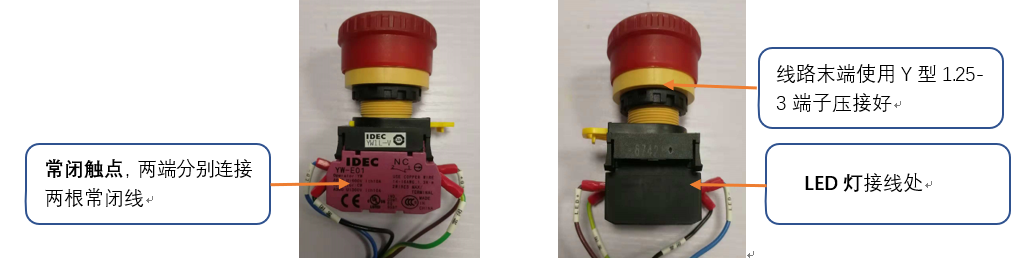
图 4.2.5
5.开机按钮、急停按钮与核心控制器连接的线路图如图 4.5.3 所示,由于开机按钮的一个常闭触点(常闭 2),LED1-,急停按钮一个常闭触点(常闭 4),LED2-及客户报警灯均共用一个 GND(14 号线),为方便接线需要将 14 线单独引出接入 WAGO 五口并线器,再由并线器分别连接以上需要接入 GND 的线路;
6.分别将开机按钮常开、常开、常闭 1、LED+,急停按钮的常闭 3、LED2+ 接入德驰 DT06-12S 公头,连接顺序参照图 4.2.6 及标准线束上的德驰 DT06-8S 母头,最终效果图如
4.2.6 所示;
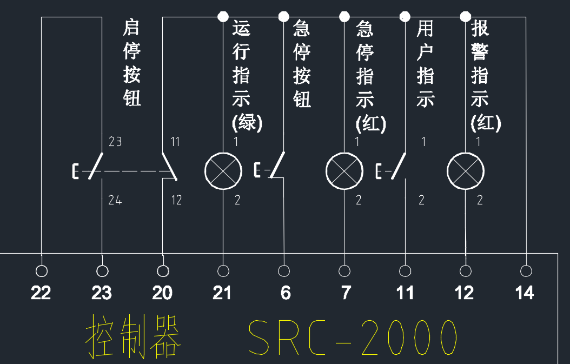
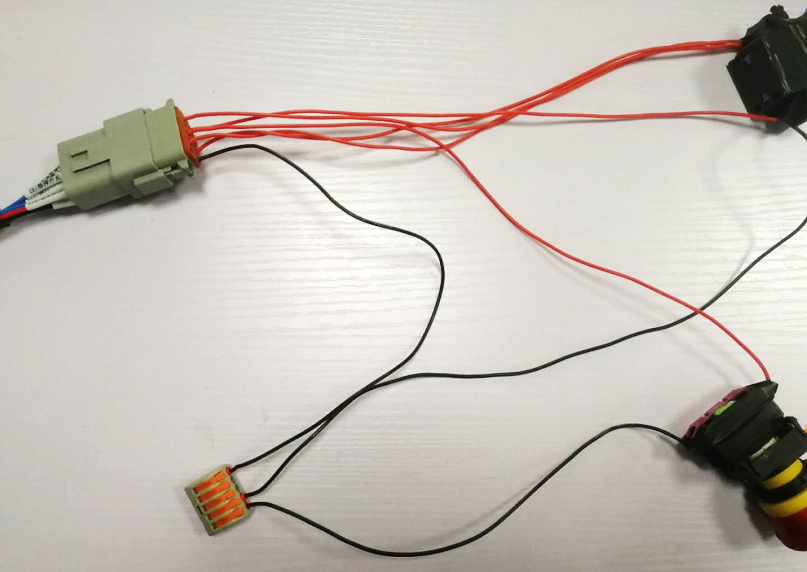
图 4.2.6
注:4.2.6 右图未接入开机信号灯线路、急停线号灯线路未接,所以 WAGO 并线器上有两根线未接。
4.3 类 Kiva 顶升部分 DI 使用规范
4.3.1 接线说明
|
顶升部分 DI 使用规范 |
|
|
|
|
序号 |
DI |
功能 |
SRC 线号 |
|
1 |
DI2 |
顶升下限位开关信号 |
T23 6 号线 |
|
2 |
DI5 |
顶升上限位开关信号 |
T23 7 号线 |
|
3 |
DI6 |
旋转零位信号 |
T23 5 号线 |
注1:在顶升车上这三个 DI 不能作为其他其他用途;
注2:确保这三个传感器的均为 NPN 型,发出的信号能被 SRC 核心控制器检测到。
4.4 进行改造(底盘驱动器部分)
4.4.1 行走电机驱动器安装方式
1.驱动器需要与车体进行可靠固定,检查驱动器与对应电机的三相线、编码器线路连接正确;
2.当机器人安装有多个驱动器(数量 ≥2)时,所有从站的 CAN_L,CAN_H 引脚直接相连即可,尽量采用串联方式接线,如图 4.4.1 所示;若驱动器仅提供一个通讯接口,无法完成驱动器的 can 线串联时,则将所有驱动器 can 线引出后把所有 can_H 压入同一德驰插筒连接器,将所有 can_L 压入同一德驰插筒连接器,接入德驰 DT06-2S 公头,最后与 TE35 中的 32、33 号线(can1)相连.
由于部分驱动器没有提供级联接口,只能通过从总线上接引线的的方式来串联,这里引线的长度需小于 10CM.
注:在改造过程中若由于驱动器连接所需要的线束数量不足,无法实现在驱动器端进行快速串联,可采用图 4.4.2 所示连接方式,但不推荐。
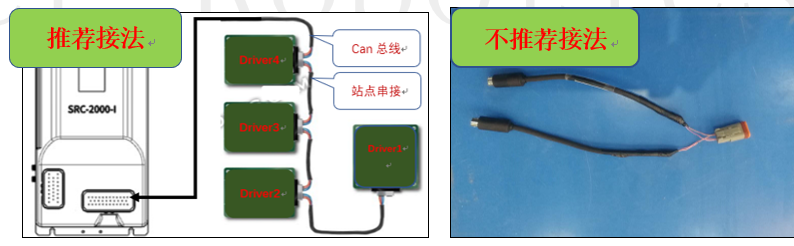
图 4.4.1 图 4.4.2
为保证 can 通讯质量,需要在距离核心控制器最远的驱动器上或总线末端安装终端电阻(阻值一般是 120ohm).(注:客户可在购买驱动器时向驱动器厂商提出购买配套终端电阻)
3.CAN 终端电阻是否正确打开的检测方法:
关机断电,断开驱动器和控制器的 CAN 连接线(如图 4.4.1 中 Driver4 和控制器之间的位置),使用万用表电阻档测量驱动器侧的 CAN 总线上 CAN_L、CAN_H 之间电阻,电阻值为 120Ω则正确,如图 4.4.3 所示。电阻值明显小于120Ω(如60Ω),则说明至少有两个驱动器打开的终端电阻。
断开图 4.4.1 中 Driver1 和 Driver2 之间的连接线,使用万用表电阻档测量 Driver1 侧的 CAN 总线上 CAN_L、CAN_H 之间电阻,电阻值为 120Ω则正确,如图 4.4.3 所示。如果电阻值明显大于 120Ω(如几 KΩ),则说明终端电阻打开的位置不在 CAN 总线末端,需要调整。

图 4.4.3
4.森创驱动器采用控制电机是否使能的方式来实现急停与否的功能。电机是否使能可以通过控制驱动器上相应 IO 口电平高低的方式来实现,如图 4.4.4 所示,将所有驱动器的 COM+并联后接入 DCDC 24V+ 输出;将所有驱动器 IN1 并联后连接 SRC2000 急停输出 1+(TE35 4 号线),将另一根急停输出 1-(TE35 5 号线)连接 DCDC 24V- 输出;(下图仅供参考,请按照实际的电气原理图进行接线相关操作)
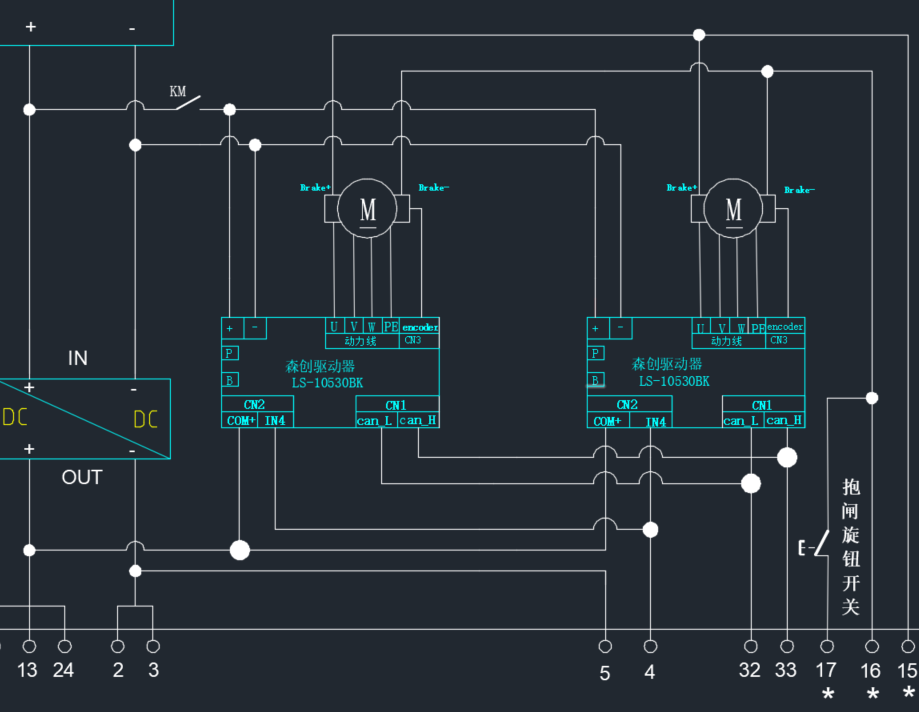
图 4.4.4
注:TE35 的 4 号和 5 号线标无正负之分,为一组干触点,在实际接线中可以不用区分其正负。
4.5 电机抱闸线处理方式
1.若采用的电机为带抱闸的电机,为实现驱动器断电后仍能推动机器人到指定地点的目标,将电机抱闸由 SRC2000 核心控制器直接控制,将抱闸开关外接,方便手动控制抱闸,同时保留机器人失电抱闸功能。
2.将两电机 Brake+、Brake- 线分别接入 T23【15】抱闸输出、T23【16】地;将 T23【17】抱闸开关、T23【16】地接入短柄旋钮开关;T23 的【16】地线为共用地线,最终效果如图 4.5.1 所示:
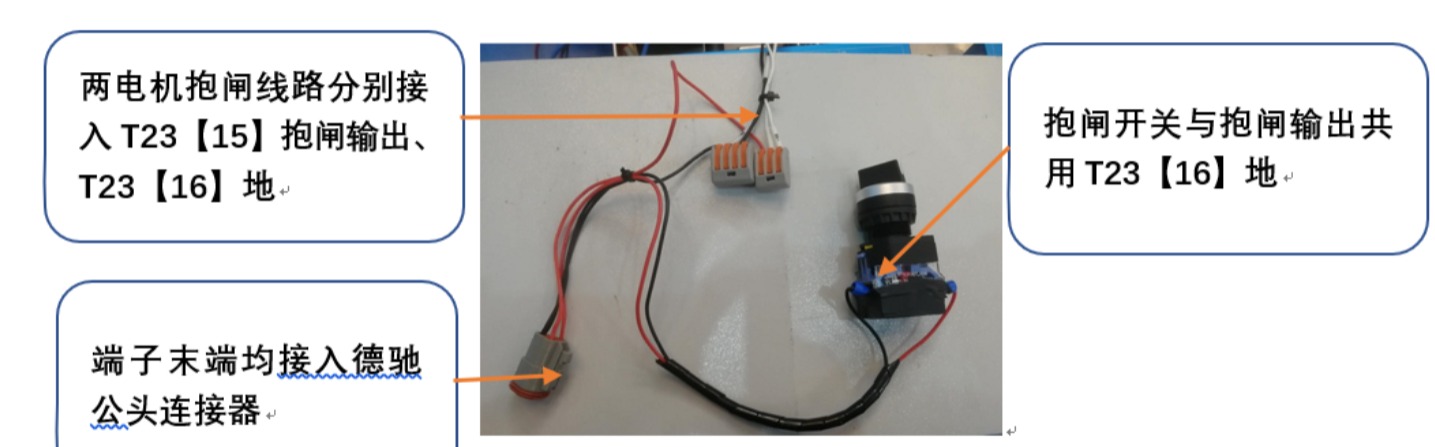
图 4.5.1
4.6 驱动器参数配置
前提:
驱动器类型:一体式,一对一式,一拖二式
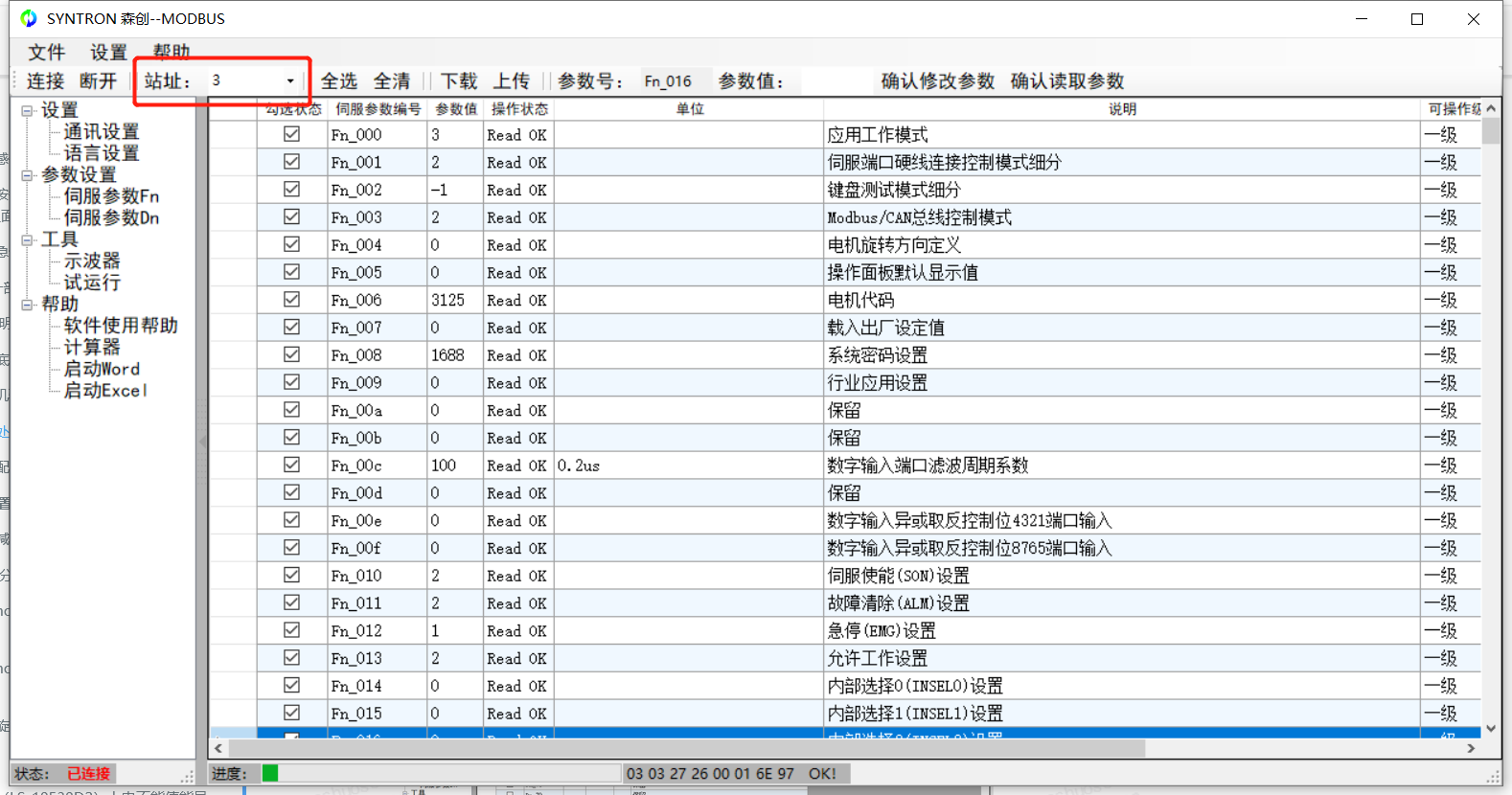
需要注意一拖二式驱动器配置方法,HLS一拖二驱动器采用的方式为物理上两个驱动器共用一个封装,走同一路通讯,一拖二的两个驱动器依靠节点号区分即SYNTORN 软件中的站址,两个节点互相独立需单独配置参数,修改参数后需按回车再点击下载,修改站址后重启生效
驱动器配置软件 SYNTORN 及软件使用手册请联系驱动器厂商官方售后。
SYNTRON20191028.7z52.1MB
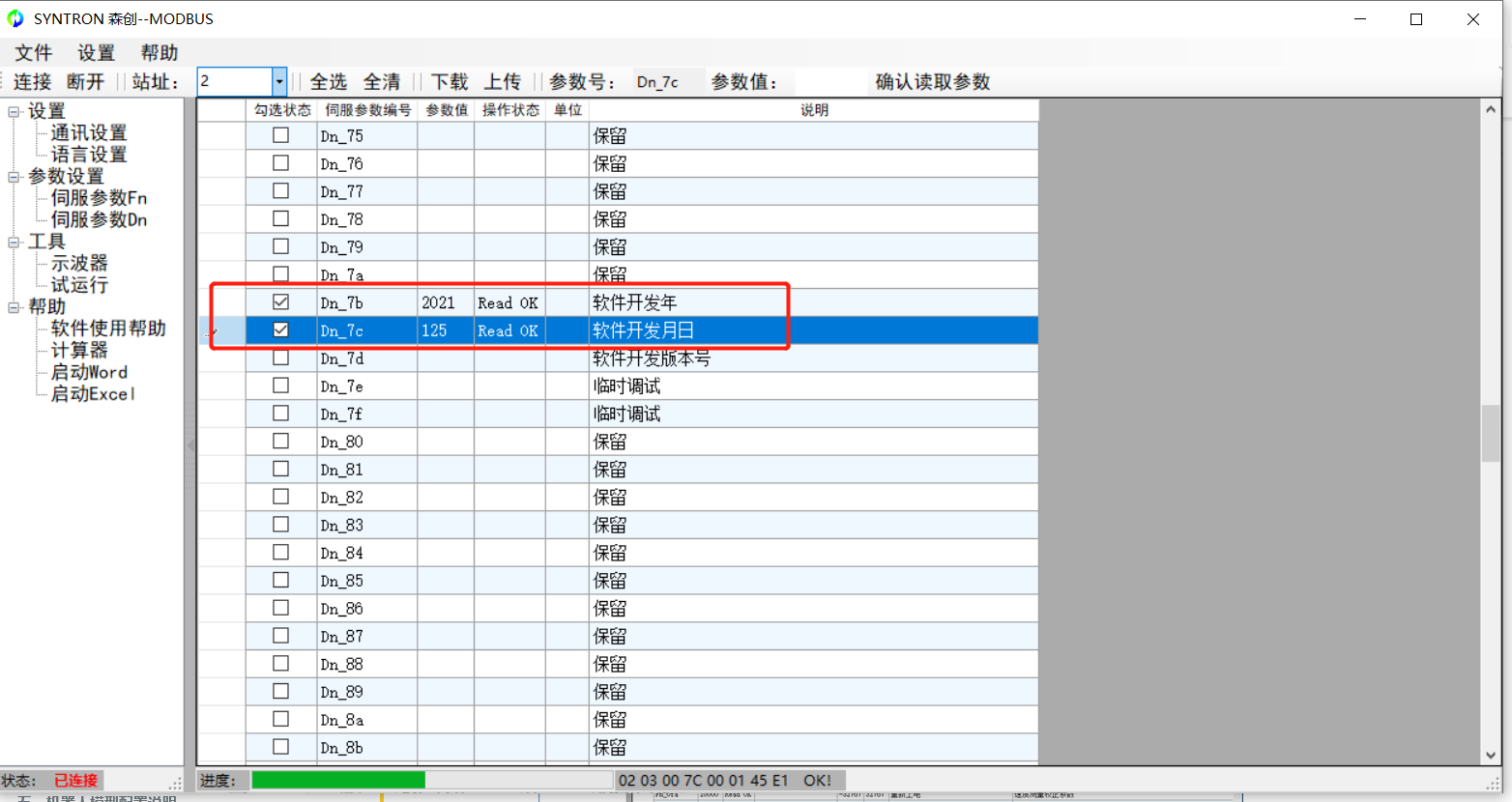
配置前查询Dn_7b和Dn_7c的值,确保软件开发年份在20200901之后
如果驱动器是canopen协议,配置前先恢复出厂设置;给Fn_007写入1,下载后重启生效;不同节点需要单独恢复出厂设置

再用USBcan打开驱动器的设备,设置驱动器上电自动打开NMT
给,帧ID选择0x600+ID,以设备ID为1的驱动器为例
依次发送can数据【手动发送数据】
帧ID 0x601 2b 04 10 00 AA 55 00 00 【将0x55AA写到1004h】
帧ID 0x601 23 10 10 01 73 61 76 65 【保存配置】
注意: 由于保存参数时间较长,需要等待接收到保存指令的 SDO 写成功应答才为
保存成功。如未接收到 SDO 写成功应答, 则未保存成功,重复上述步骤。每个设备重复上述操作
4.6.1 行走驱动器配置方法一(速度模式)
HLS一体机的参数也按照下面步骤配置,软件需要在管理员模式下运行。
1.【can 波特率】将驱动器 can 波特率更改为 250KHz,更改参数 Fn_0f3 值为 250,如图 4.6.1 所示;
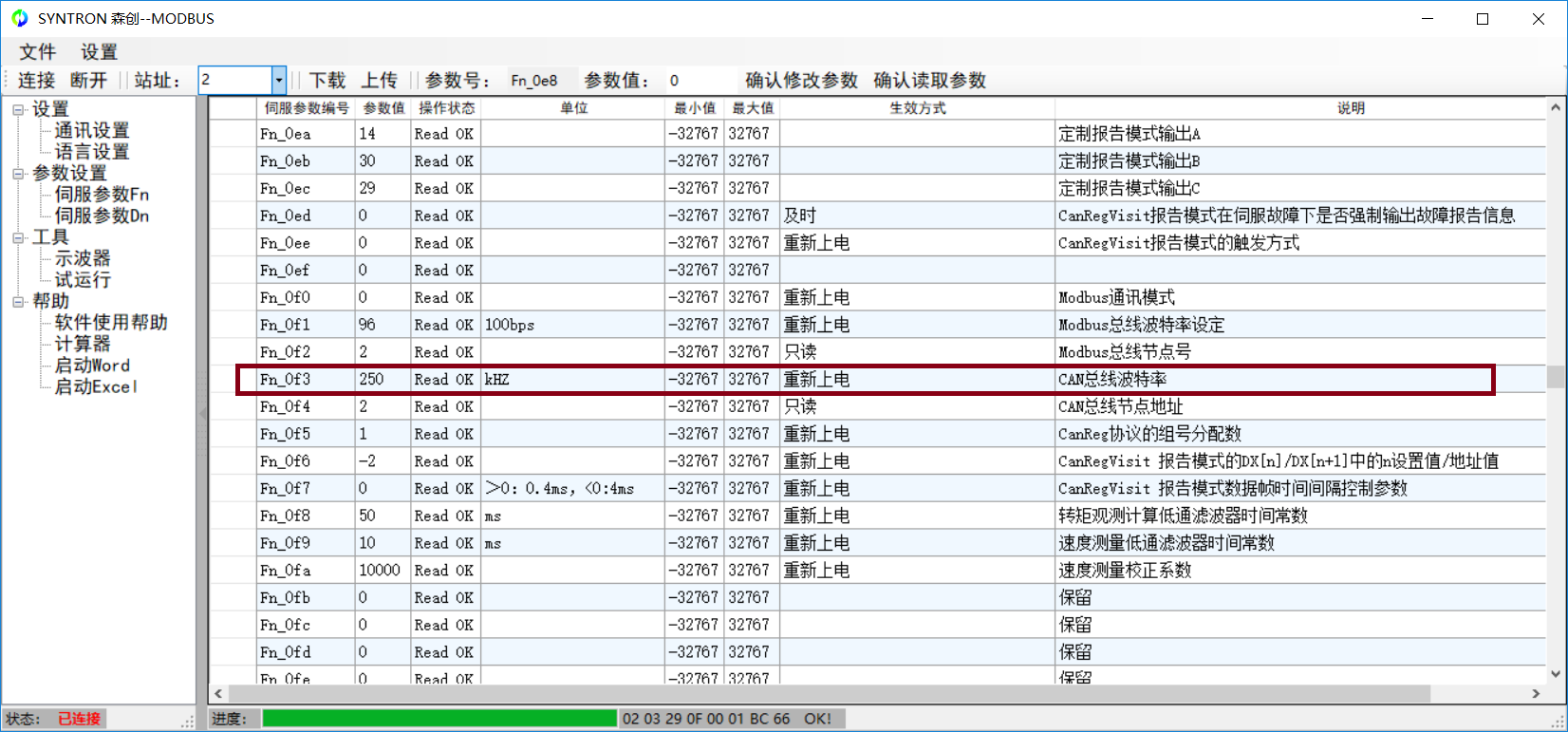
图 4.6.1
2.【驱动器 I/O】由于我们接线使用了 IN1,所以需要在 I/O 配置界面做出相应的配置,更改参数 Fn_012 值为“-1”,如图 4.9.2 所示;
注:若驱动器型号是无 IO 急停配置的,更改 Fn_012 值为“1”.
(Fn_012:紧急停止设置:1:内部使能,0:内部关闭,-1~-8:选择数字 1-8 路输入)
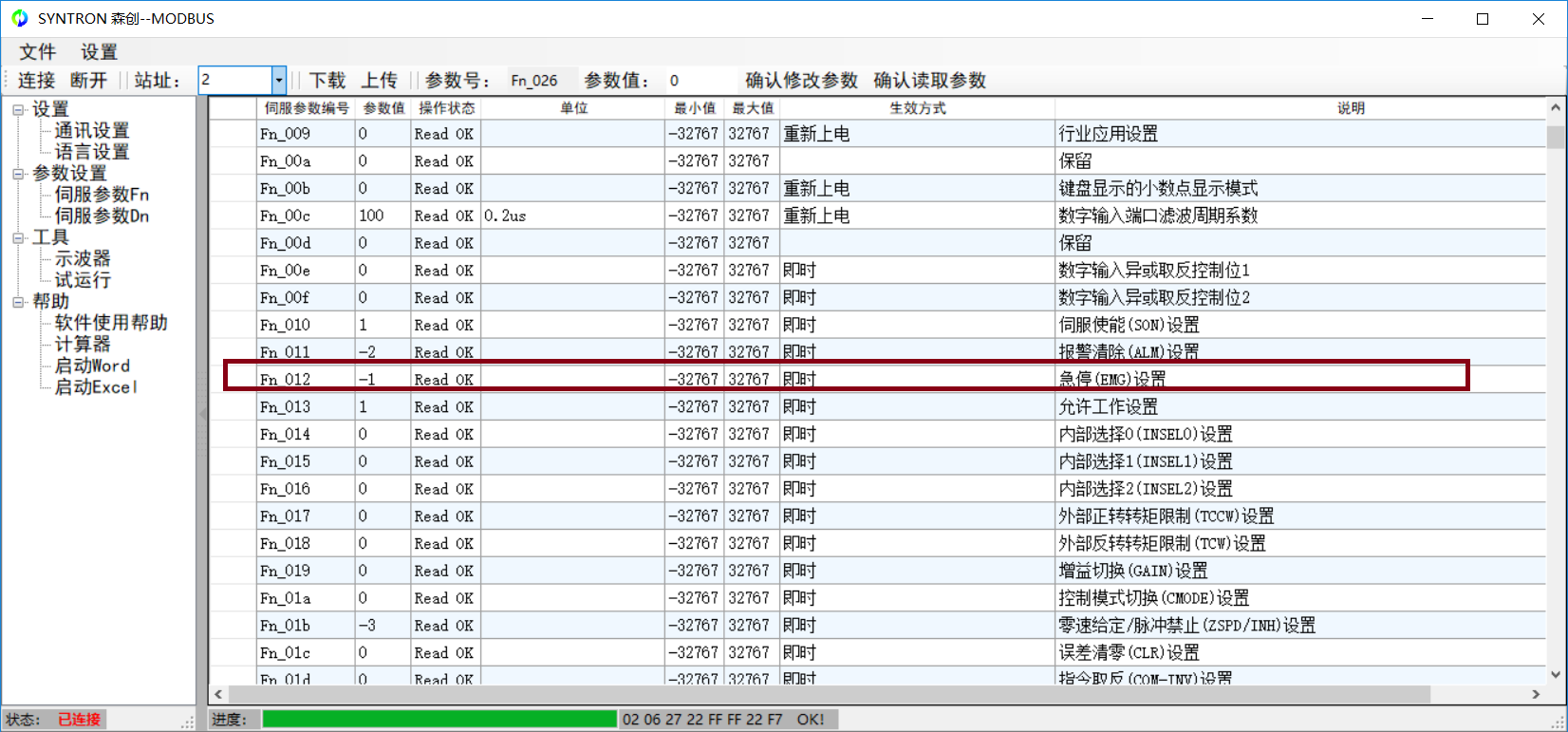
图 4.6.2
3.【工作模式】并将总线控制模式更改成“速度运行模式”,更改参数 FN_000 值为 3;
【选择通讯模式】将驱动器工作模式更改为 CAN 总线控制模式,更改参数 FN_003 值设为 2;
配置方式如图 4.6.3 所示;
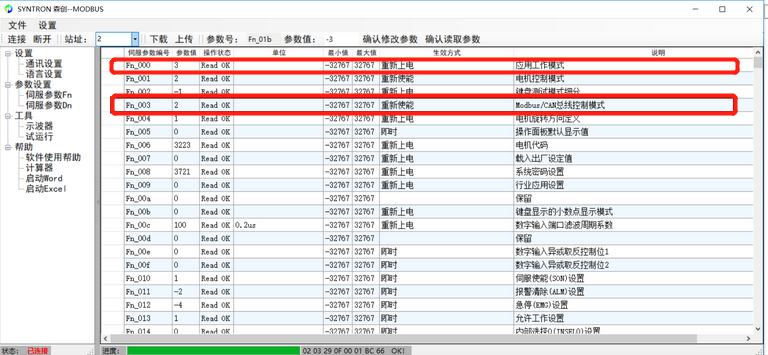
图 4.6.3
4.【驱动器编号】分别给驱动器给予不同的 can ID,双轮差动机器人,将左边的驱动器编号为 ID 1,右侧驱动器编号为 ID 2,顶升驱动器地址 ID 3,旋转驱动器地址 ID 4,驱动器 CAN ID 明细如表 4.6.1 所示,配置方式如图 4.6.4 所示;
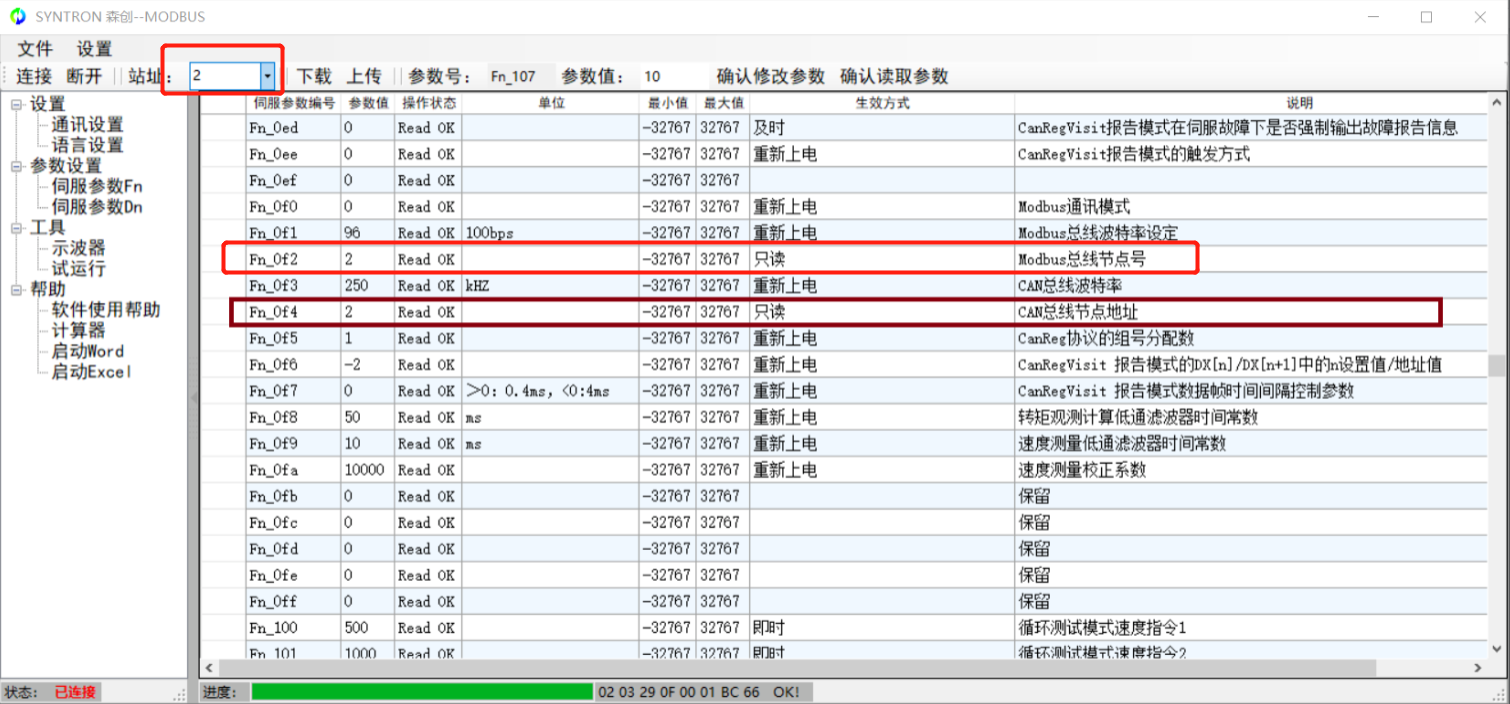
图 4.6.4
注:参数 FN_0f4 为 CAN 总线节点地址,修改 CAN 总线节点地址即修改驱动器的 CAN ID,FN_0f2需要与FN_0f4 保持一致,加载参数时,左上角的站址就是FN_0f2(节点号)
|
驱动器 CAN ID 分配规范 |
|
|
|
序号 |
驱动器 |
CAN ID |
|
1 |
左驱动轮驱动器(激光视角) |
1 |
|
2 |
右驱动轮驱动器(激光视角) |
2 |
|
3 |
顶升驱动器 |
3 |
|
4 |
旋转驱动器 |
4 |
表 4.6.1
5.【通讯超时】将驱动器通讯超时更改为“关闭”,将参数 FN_1c0 值设为 0,如图 4.6.5 所示;
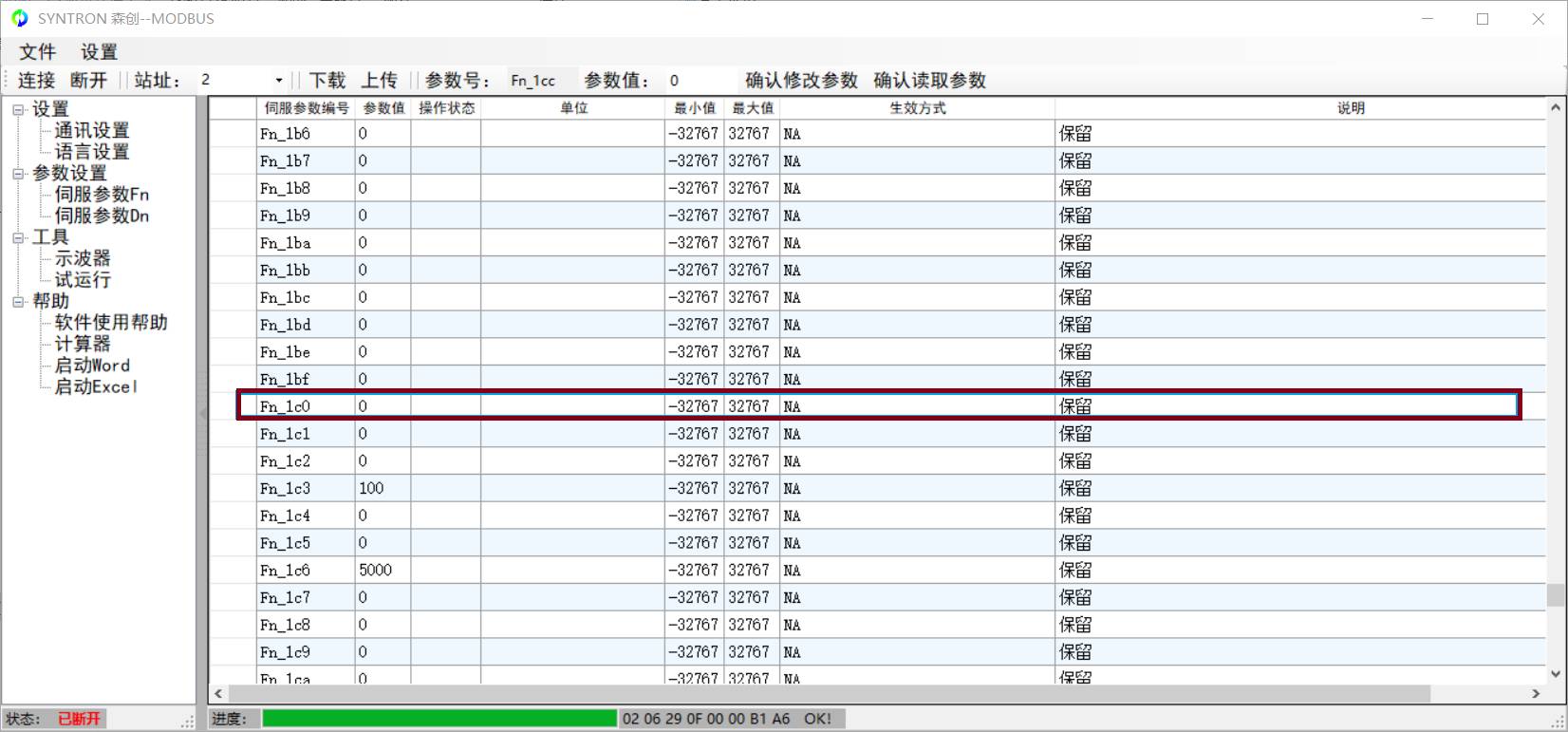
图 4.6.5
6. 【配置看门狗功能】(仅支持森创驱动器 LS,DM,SM 系列)确认参数 FN_1c0 参数值为 0,将参数 Fn_1cb 配置为 1,参数 Fn_1cc 配置为-1,参数 Fn_1cd 配置为 500,参数 FN_1ce 配置为 400.如图 4.6.6 所示。
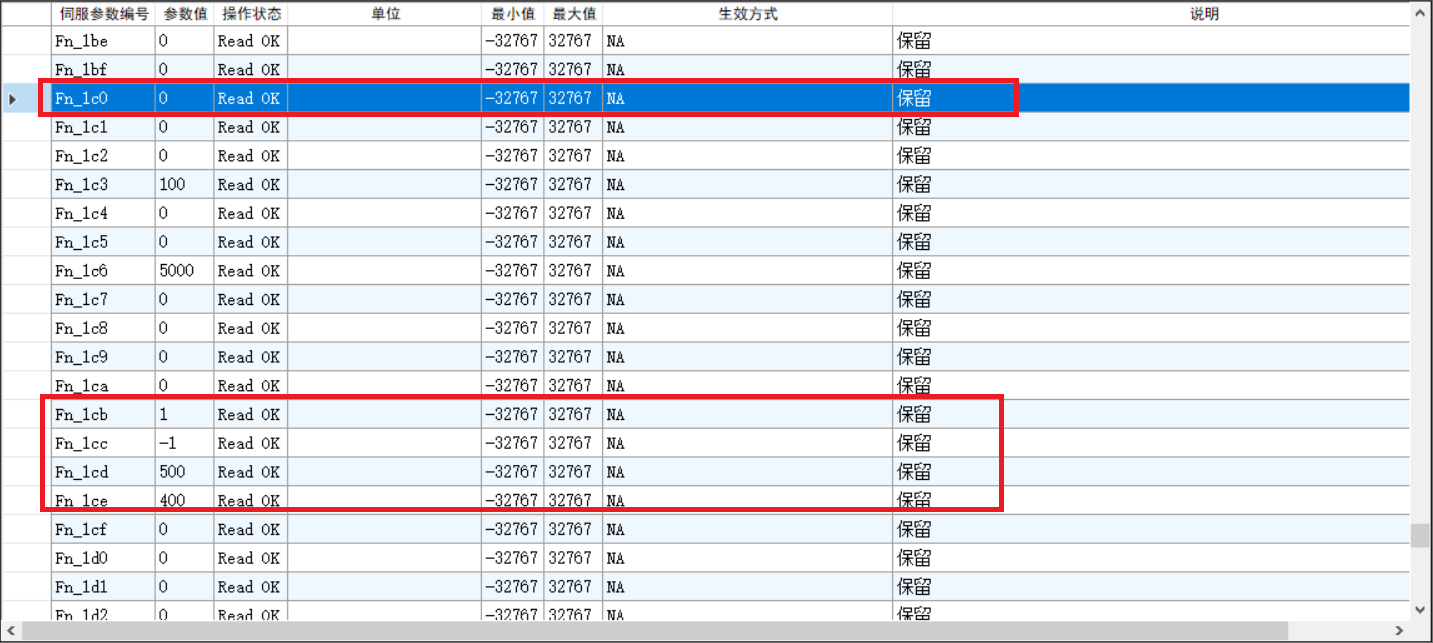
图 4.6.6
7.【低速位置闭环】将参数 Fn_07E 配置为 1,参数 Fn_07F 配置为 1.如图 4.6.7 所示。
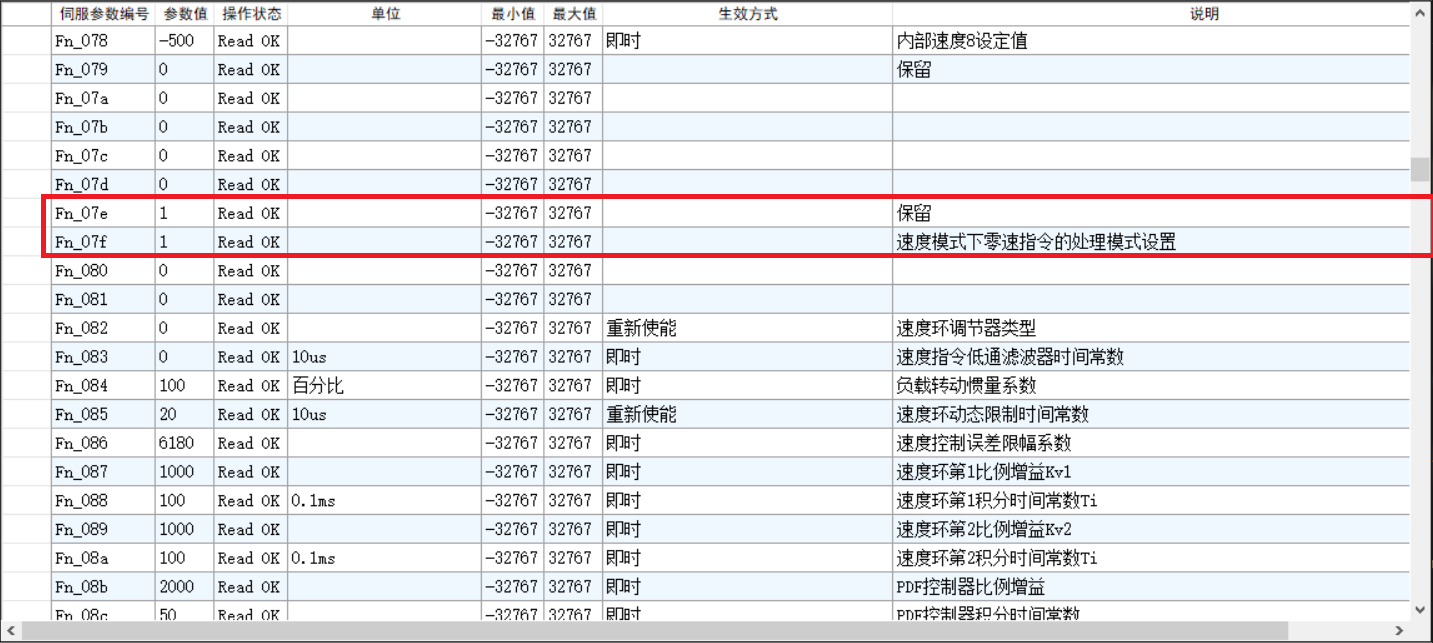
图 4.6.7
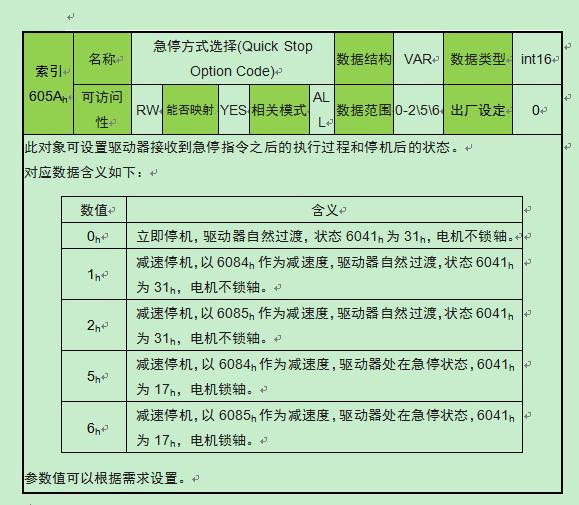
- 配置减速驱动器急停动作,使用can卡发送
4.8. 参数修改结束后,将参数下载至驱动器,然后对驱动器进行断电重启,如图 4.6.8 所示。
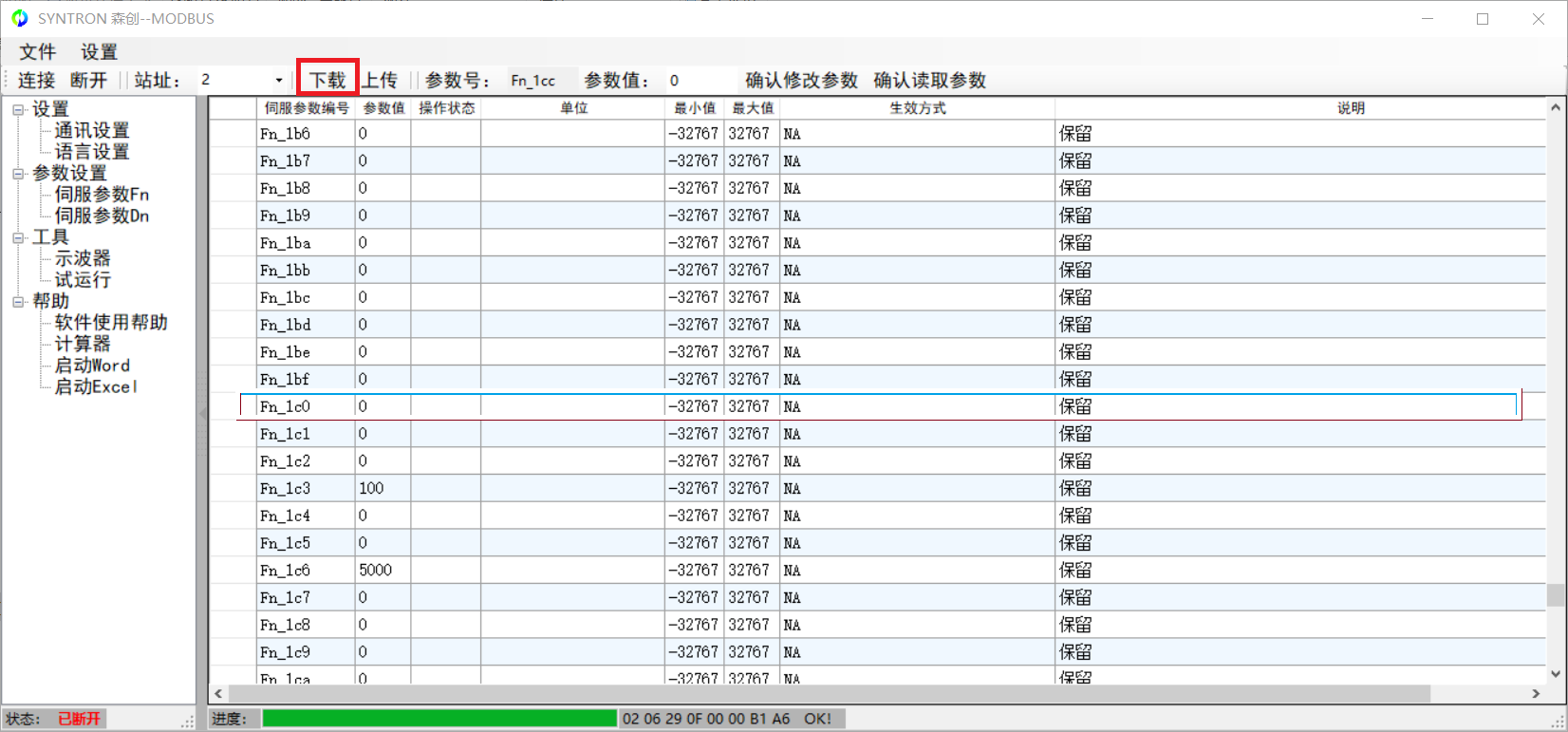
图 4.6.8
4.9. 所有参数也可以通过txt文档进行加载,加载方式为文件>加载参数文件(*.txt),在弹出的对话框内选择需要加载的Config。加载完成之后,下载至驱动器。如图 4.6.9 所示。

图 4.6.9
附件是参考Config,非通用。如有更改,需自行更改需要更改的Config数值。
HLS_Config.txt6.5KB
五、机器人模型配置说明
5.1 根据电机及减速实际情况配置行走电机参数
Roboshop 版本是 2.0.X(固件版本为 1.8.X 及以下),请参考机器人模型图 5.1.1 所示;Roboshop 版本是 2.1.X(固件版本为 1.9.X 及以上),请参考机器人模型图 5.1.2 所示;
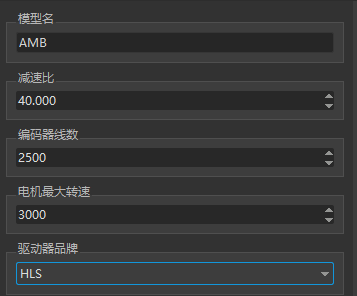
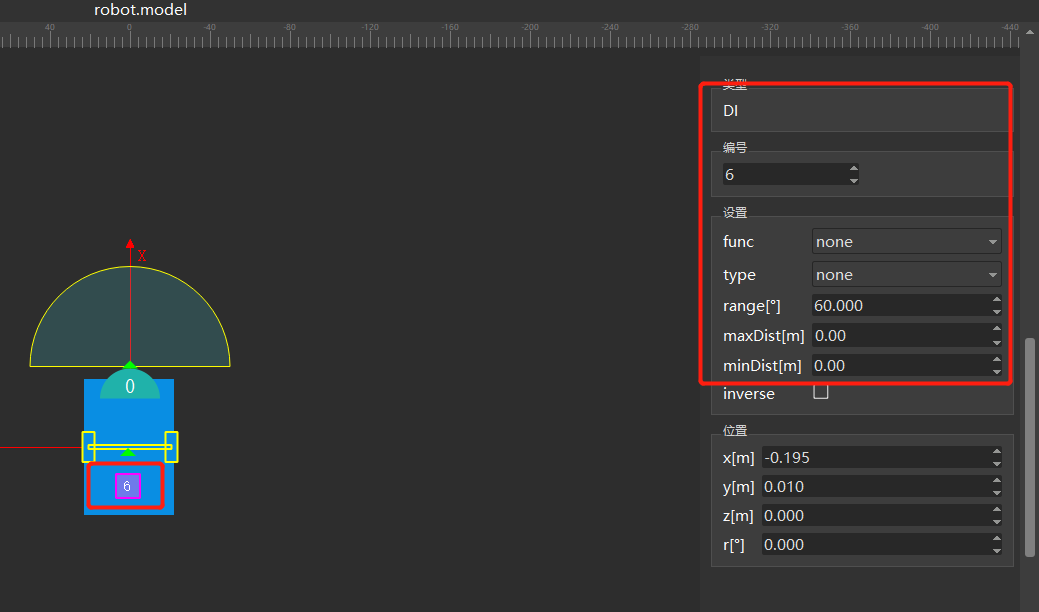
图 5.1.1 图 5.1.2
注:减速比、编码器线数、电机最大转速、驱动器品牌需要根据选用的实际填写。
5.2. 配置顶升部分 DI 参数
5.2.1 Roboshop 版本是 2.0.X 及固件版本为 1.8.X 及以下
1.将一个 DI 拖动至车体上任意位置,将 DI 编号更改为 6,func 配置为 none,type 配置为 none,maxDist 配置为 0,如图 5.2.1 所示;(DI6 为旋转零位信号)
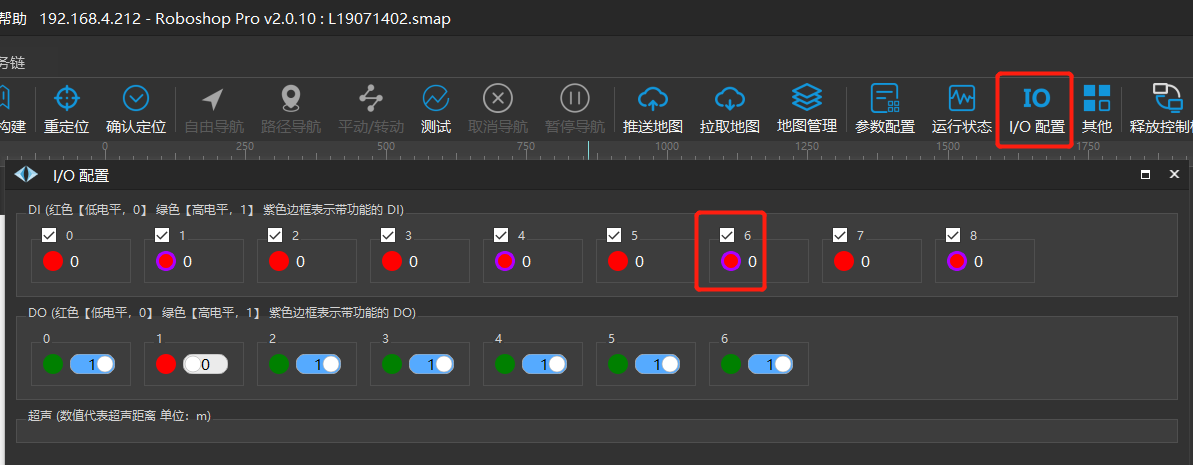
图 5.2.1
2.保存并推送 model 文件,等待 45s 后,打开 Roboshop 中 I/O 配置,按照表查看 DI6 状态,如图 5.2.2,表 5.2.1 所示;
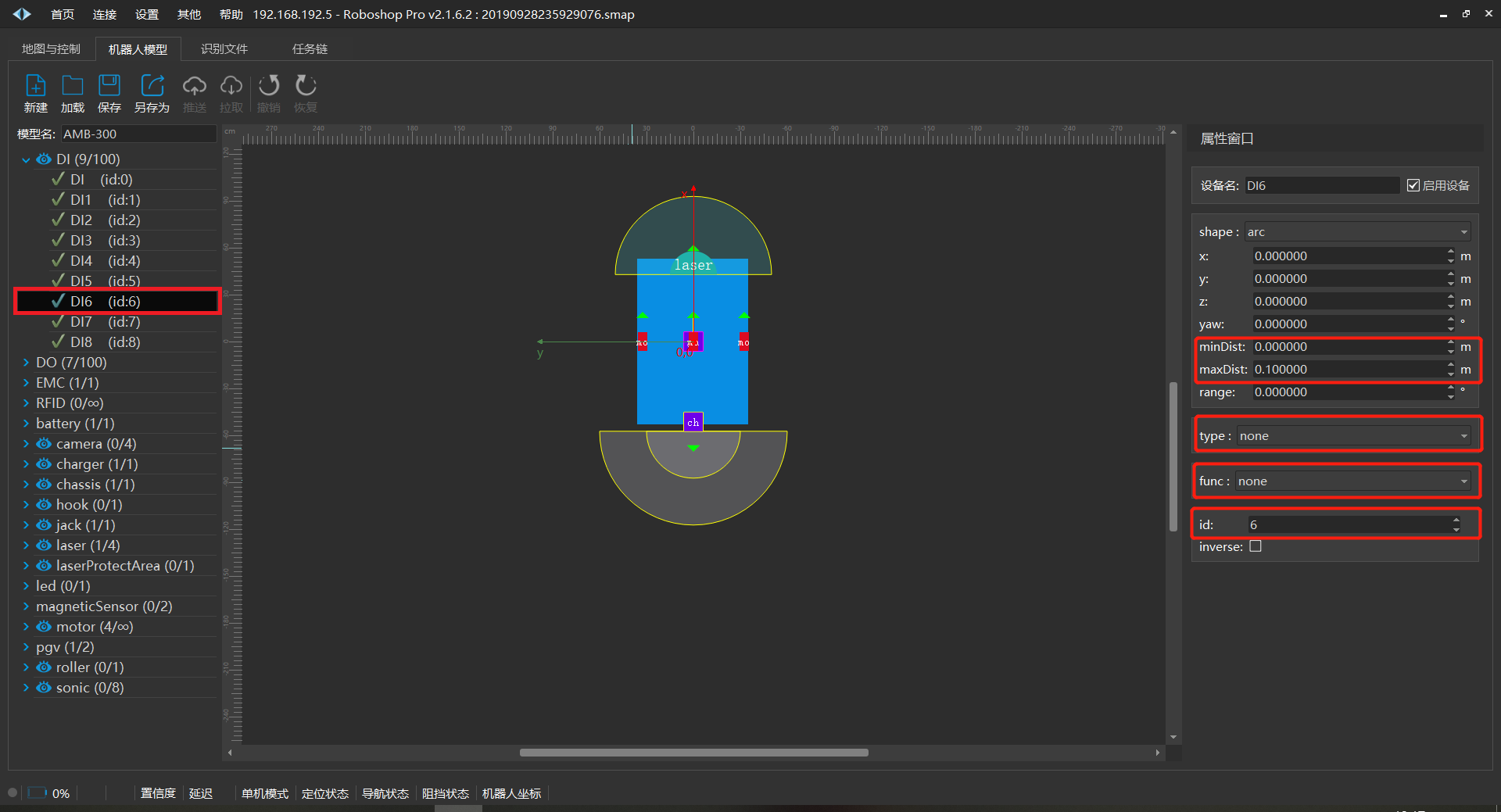
图 5.2.2
|
顶升部分 DI 状态确认表 |
|
|
|
|
序号 |
动作 |
DI6 状态 |
需采取措施 |
|
状态一 |
手动触发 DI6 |
绿色 |
状态正常,不需要采取任何措施 |
|
|
不触发 DI6 |
红色 |
|
|
状态二 |
手动触发 DI6 |
红色 |
状态需要取反,勾选 4.2.1 中 inverse 选项并重新上传 model |
|
|
不触发 DI6 |
绿色 |
|
|
状态三 |
手动触发 DI6 |
绿色 |
检查传感器是否被其他物体触发 |
|
|
不触发 DI6 |
绿色 |
|
|
状态四 |
手动触发 DI6 |
红色 |
检查传感是否存在故障或选型错误 |
|
|
不触发 DI6 |
红色 |
|
表 5.2.1
3. 重复步骤 1,2 将 DI2,DI5 正确配置至 model 文件。
5.2.2 Roboshop 版本是 2.1.X 及固件版本为 1.9.X 及以上
1.在机器人模型里左侧设备选型添加一个 DI 设备,将 DI 编号 ID 更改为 6,func 配置为 none,type 配置为 none,maxDist 配置为 0,如图 5.2.3 所示;(DI6 为旋转零位信号)
图 5.2.3
2. 保存并推送 model 文件,等待 45s 后,打开 Roboshop 中 I/O 配置,按照表查看 DI6 状态,如图 5.2.4,表 5.2.4 所示;
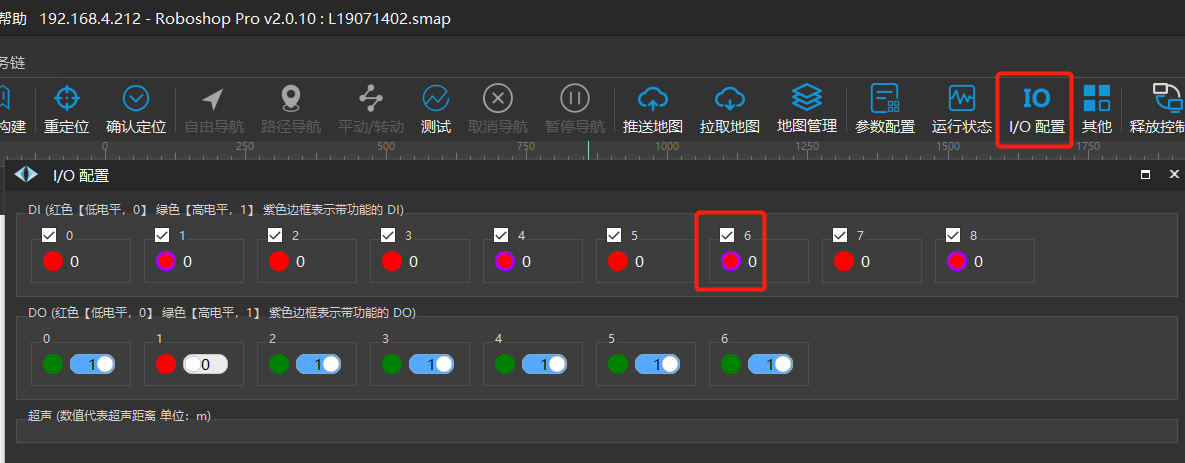
图 5.2.4
|
顶升部分 DI 状态确认表 |
|
|
|
|
序号 |
动作 |
DI6 状态 |
需采取措施 |
|
状态一 |
手动触发 DI6 |
绿色 |
状态正常,不需要采取任何措施 |
|
|
不触发 DI6 |
红色 |
|
|
状态二 |
手动触发 DI6 |
红色 |
状态需要取反,勾选 5.2.4 中 inverse 选项并重新上传 model |
|
|
不触发 DI6 |
绿色 |
|
|
状态三 |
手动触发 DI6 |
绿色 |
检查传感器是否被其他物体触发 |
|
|
不触发 DI6 |
绿色 |
|
|
状态四 |
手动触发 DI6 |
红色 |
检查传感是否存在故障或选型错误 |
|
|
不触发 DI6 |
红色 |
|
表 5.2.2
3. 重复步骤 1,2 将 DI2,DI5 正确配置至 model 文件。
5.3 配置顶升、旋转驱动器参数
具体步骤参考 https://shimo.im/docs/dL9kBMz8b8EcYqK5/ 《类 Kiva 顶升改造指导书》,步骤 2,步骤 3,步骤 4;
六、异常处理
6.1 森创驱动器(LS-10530D2)上电不能使能异常情况处理
这款驱动器若出现上电不能使能情况,可通过修改驱动器 1004 隐藏位以及 1010 隐藏位进行修改,具体操作步骤如下:
1. 使用 CAN 卡在驱动器 1004 位写入 2B 04 10 00 AB 55 00 00,如图 6.1.1 所示:

图 6.1.1
2. 使用 CAN 卡在驱动器 1010 位写入 23 10 10 02 73 61 76 65,如图 6.1.2 所示;

图 6.1.2
6.2. 其他型号驱动器修改参数不能使能情况处理
1. 询问供应商项目所选用的电机编号,正确填写入 F0007,确认修改,将参数传入驱动器;
2. 将 F0006 参数修改为 1,确认修改,将参数传入驱动器,此时对启动器进行断电重启,此时驱动器参数将全部载入默认参数,如图 6.2.1 所示
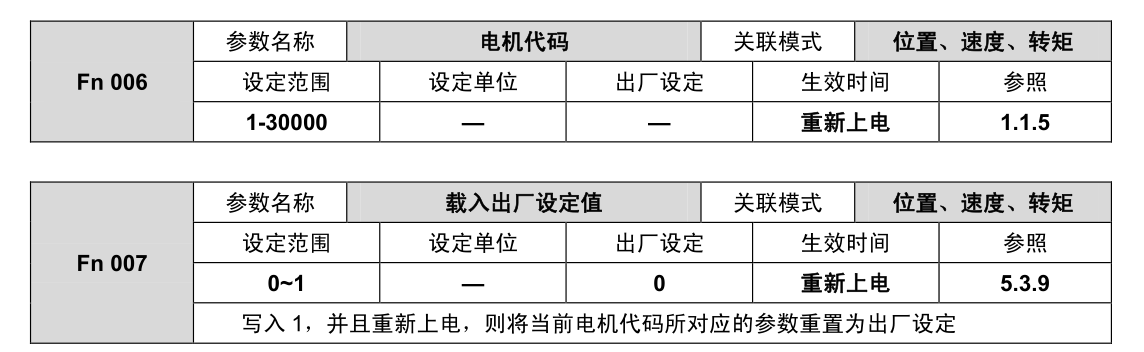
图 6.2.1
3. 按照上文中的 4.1-4.7 重新配置驱动器参数,然后对驱动器断电重启。
注:Fn007 为恢复出厂设置,仅需使用一次,后续就不需要再次写入“1”,否则驱动器将再次恢复出厂参数。
七、 驱动器行走电机的功能检测
1. 在整车组装完成未安装外壳前,请再检查一遍接线确保接线正确。
2. 将车体架高,使轮子离地。开启机器人,使用网线连接机器人。使用 Roboshop 软件操作机器人让轮子转起来。 使用 CanScope 夹在 CAN 总线上检测 CAN 报文至少 1 小时,CAN 报文无错误。
3. 让车体着地,使用 Roboshop 软件操作机器人做运动动作:向前,向后,向左,向右运动未拍急停按钮前,推动机器人,无法推动(电机使能),检查 Roboshop 中机器人状态处于“未急停”“驱动器未急停”,如图 7.1 所示;所示拍下急停按钮后,再次机器人,可以推动(电机使能释放),检查 Roboshop 中机器人状态处于“已急停”,“驱动器已急停”。如图 7.2 所示。
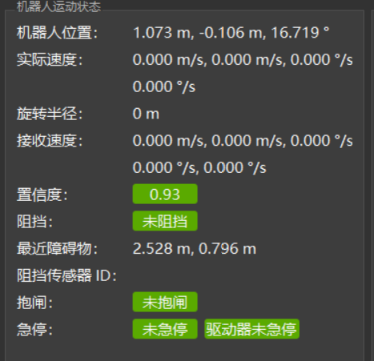
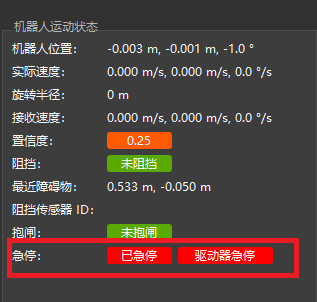
图 7.1 图 7.2
4. 任务链运动老化测试 24H,查看 Robokit Log 无错误报警。
八、 附录
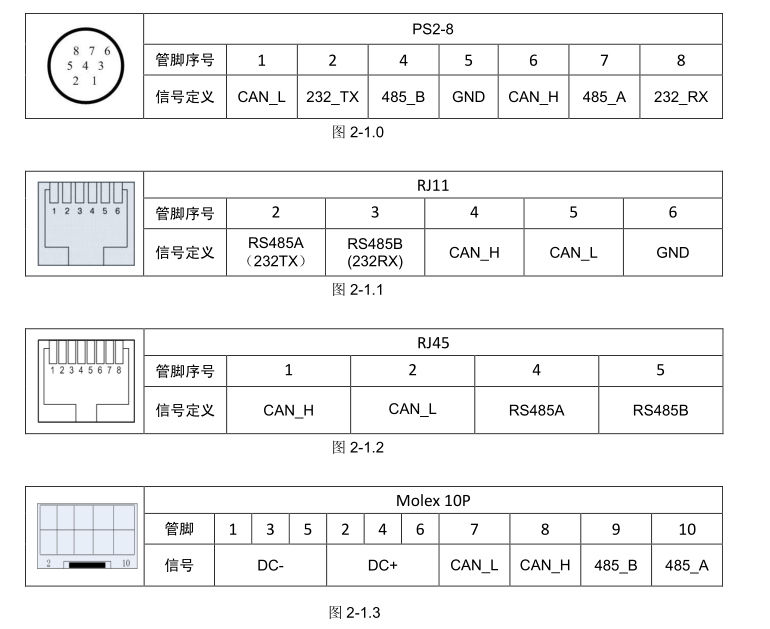
8.1 通讯端子引脚分布及定义
8.2 致远 CAN Scope 使用方法
1. 软件安装--安装 CAN Scope 配套软件 CANScope.(软件及使用手册请联系致远厂商售后).
CANScope 1.6.1.7123.exe94.1MB
2. 硬件连接--参考 CAN Scope 使用手册接好电源,USB 调试线,插上 CAN Port 板,将 CAN_H 接到 SRC2000 外接线束 TE35 33 号线上,将 CAN_L 接到 SRC2000 外接线束 TE35 32 号线上。 USB 调试线插在电脑上。
3. 打开软件 CANScope,选择【Port 板】,取消【启用终端电阻】,选择【报文】,配置【波特率】为 250Kbps,取消【总线应答】,选择【开启】,CAN 报文实时如图 8.2.1 所示。
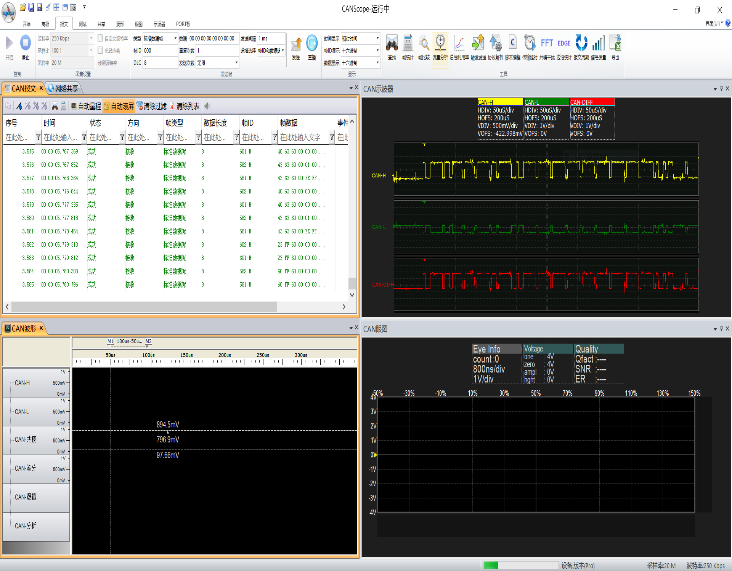
图 8.2.1
4. 选择【状态】【错误】,检查是否有错误报文。如图 8.2.4 所示。
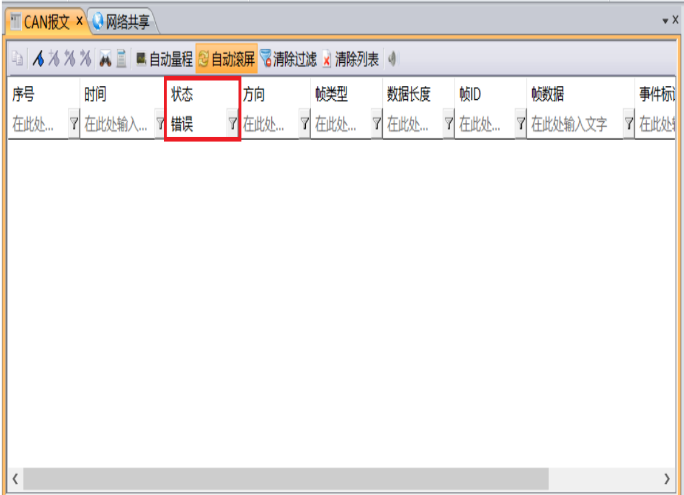
图 8.2.2
8.3 USB CAN 卡使用方法
1. 软件安装―安装软件 USB_CAN Tool(软件及使用手册请联系 CAN 卡厂商售后)。
2. 硬件连接―准备 USB CAN 卡和连接线,将连接线 CAN_H 接到 SRC2000 外接线束 TE35 33 号线上,将连接线 CAN_L 接到 SRC2000 外接线束 TE35 32 号线上。如图 8.3.1 所示。
图 8.3.1
3. 打开 USB CAN tool ,选择【设备操作(O)】【启动设备(S)】,确认 CAN 参数,【波特率】为 250Kbps,选择【CAN 通道号】为通道 1,点击【确认】。如图 8.3.2 所示:

图 8.3.2
4. 选择【显示(V)】,取消选择【合并相同 ID 数据(M)】,CAN 报文如图 8.3.3 所示。
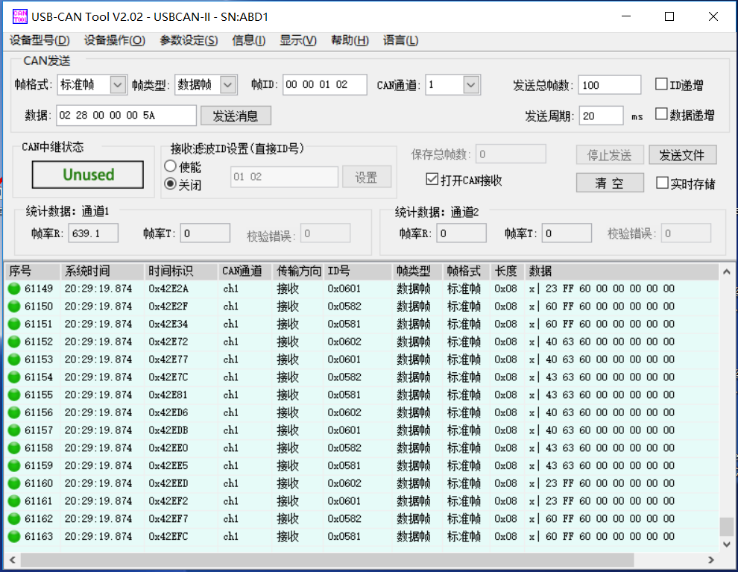
图 8.3.3
8.4 udpconsole 使用方法
udpConsole 是我司工程师用于调试 bug 开发的小工具,可以检查到固件上报的错误信息。
1. 打开 udpconsole 工具前需用网线确保电脑与机器人的物理连接。
2. 打开 udpconsole,进行驱动器功能测试,时刻检查 udpconsole 显示内容。
驱动器通讯过程中出现错误帧如图 8.4.1 所示:
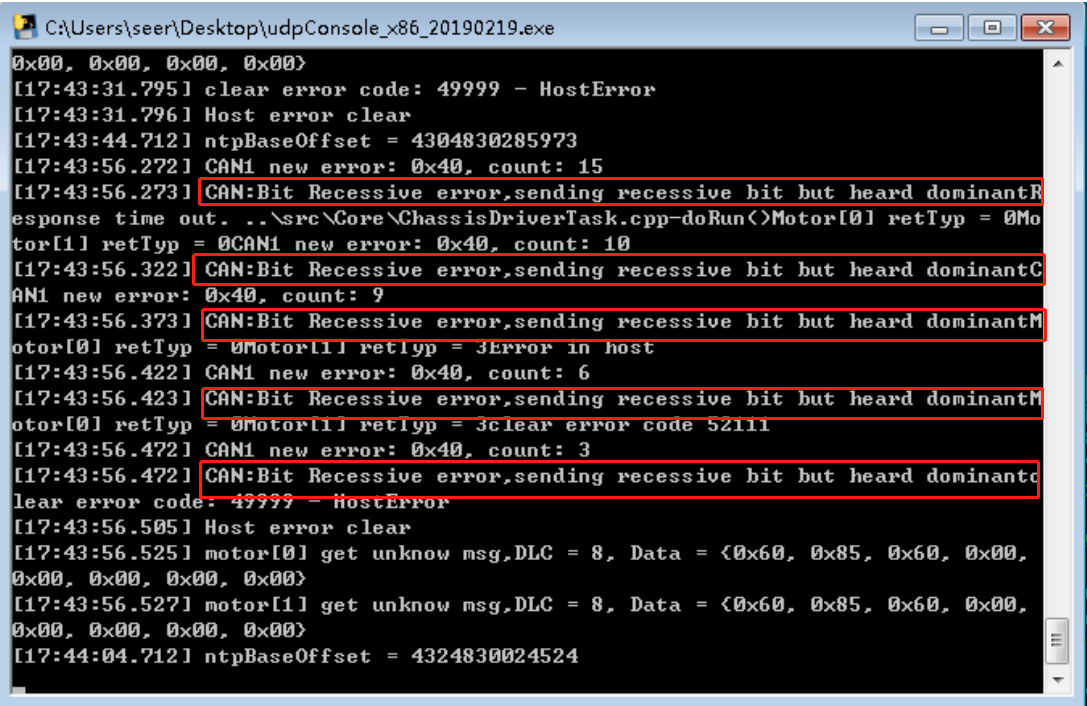
图 8.4.1
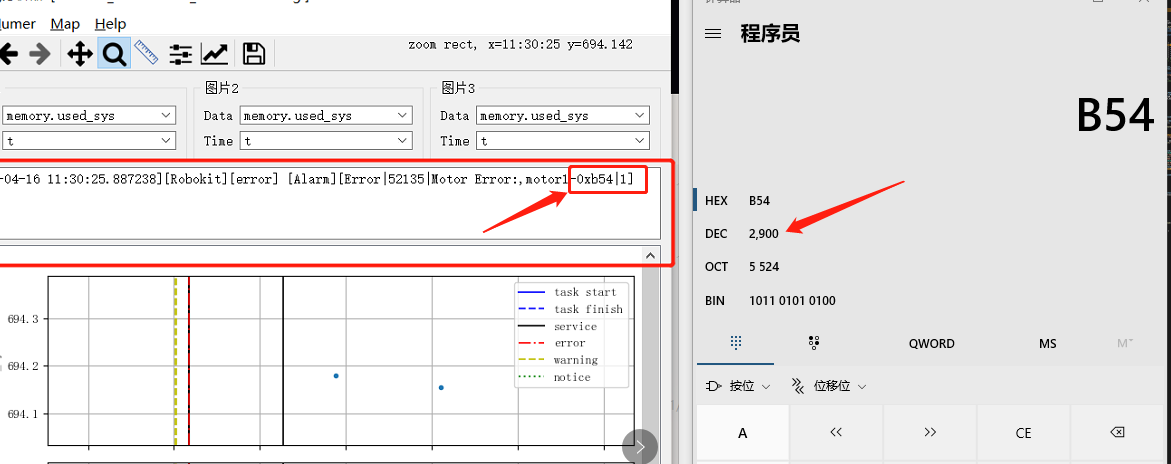
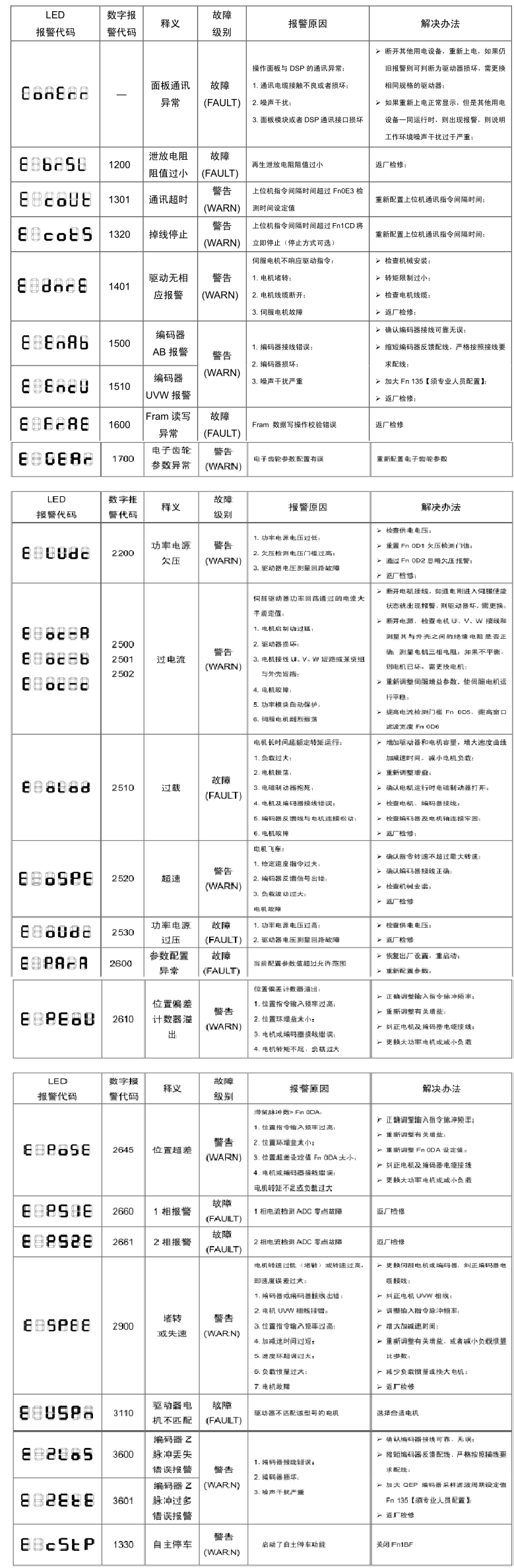
九、驱动器常见错误码
错误码转换成十进制后对应下表【数字报警代码】
例:错误码为0x0B54,转换为十进制是2900,对应【释义】为【堵转或失速】