һ���������
FOC��field-oriented control��Ϊ�ų�������ƣ��ֳ�Ϊʸ�����ƣ�vector control������һ�����ñ�Ƶ����VFD�������������ļ��������õ�����Ƶ�������Ƶ�ʡ������ѹ�Ĵ�С���Ƕȣ������Ƶ������������ڴ���ʱ�Ὣ���������������ѹ��ʸ������ʾ����˳�Ϊʸ�����ơ�
��������ԭ����
FOC���Ƶ���ʵ�ǵ���ĵ�ų�����ת�ӵ�ת�����������ڶ��ӵĴų�������ת�Ӵų�ʸ����ʸ��������ʸ���Ĺ�ϵ��֪����ʹ�����ת��ʱ�̱���������Ӵų�����Ӧ��ת�Ӵų��������ֱ������Ϊ�ų��Ĵ�С�뷽��������Ĵ�С�뷽������ֱ�ӵĹ�ϵ����������FOC�����㷨����BLDCʱ�Ĺؼ����ǿ�����������ĵ�����С�뷽�����Ƶ����������Ӵų���ת�Ӵų���ֱ�Ĺؼ��ڣ������ȶ������������ѹ��������������������ǵ�֪��ת�ӵ�ʵʱλ�á�
��������ķ�����ƣ�FOC�����˿ռ����ʸ���ĸ����ʵ���ǽ�����ĵ���ʸ����ϣ��ٷֽ�Ϊ��ֱ��ƽ����ת�Ӵ����᷽�������������d-q�ṹ����ֱ����ĵ��������������ų�������ת�ӵĴų�����Ͳ�������ת���ء���ƽ����ת�Ӵ��᷽��ĵ����������������Ĵų���ת�Ӵų�һ�£��Ͳ�������κε����ء����⣬һ���õĿ����㷨����Ҫʹ���ƽ����ת�Ӵ��᷽��ĵ�������������С������Ϊ�������������ֻ��ʹ���������������������Ӿ���е�ĥ��������Ҫ������Ȧ�ĵ�������ʹ��ֱ��ת�Ӵ��᷽��ĵ��������ﵽ����ɴ˶��õ��ĵ�����غ�������������Ĵ�С�ɱ�����
Ϊ��ʹ��ת�Ӵų�ͬ��Ķ��ӵ���ʸ����С����Ϊ�㣩�Ҵ�ֱ�Ĵų����������Ȧ�ڵ��Ҳ�������Ҫ����ת�ӵ�ת���Ƕ�ʵʱ�ؽ�����λ�����������ȶ����������������Խ���P-I��������P-I�������ڲ�ͣ�ĵ������룬һ�����������ת����d-q�ṹ�����ƽ���÷dz���������Ҫ��·P-I��������һ������ƽ����ת�Ӵų��ĵ�����һ�����ƴ�ֱ���������Ϊƽ��������Ŀ����ź�Ϊ�㣬�������ʹ���ƽ����ĵ�������Ҳ����㣬��Ҳ����ʹ����ĵ���ʸ��ȫ��ת��Ϊ��ֱ��ĵ���������ֻ�д�ֱ��������ܲ�����Ч�����أ����������Ч�ʱ������һ·P-I��������Ҫ�������ƴ�ֱ��ĵ������Ի���������ź�������������ء���Ҳ��ʹ��ֱ���������Ҫ�����Ի����������ء�
ת�ӵ�ʵʱλ�õ�ȷ���������������λ�ô���������λ�ô������������д����������ڵ���Ĵ�������һ��Ϊ���������ܷ������ת�ӵ�λ����Ϣ������ڿ����п��Բ�ʹ��λ�ù����㷨������������������������ǶԴ��������ĵ��Ӧ����˵�������Կ�������Ҫ��ϸߡ����������������ڵ�������κδ���������˲���ͨ����ȡ�������IJ���ֵ���õ����ת�ӵ�λ����Ϣ�������ڿ�������Ҫͨ���ɼ�����������ʹ��λ�ù����㷨������ת��λ�á�
�����FOC����ԭ��ͼ��

1���ɼ����������
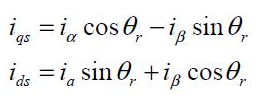
2������clarke�任��õ���������������,
3��������ת�任��õ������ĵ����� Id��Iq������Iq��ת���йأ�Id���ͨ�йء���ʵ�ʿ����У�����Id��Ϊ�����õ���������������ʱ��ģ���˿��Ե����Ķ������������п��ƣ�����ֱ��������һ����������Ҫ֪������Ҫ������������ĵ�ѹΪ���١�
4�����ڣ����еõ���Iq��Id���ֱ��ͽ�PI���������õ���Ӧ�����Vq�ͣ�d;
5��ͨ���������õ����ת���ĽǶȡ�
6��������park�任���õ������������
7���Եڣ����е�Va,Vb������clarke�任���õ�ʵ����Ҫ�������ѹ����������ţ��������ת����
��������任���ۣ�
����任���ۿ��Խ������﷽�̵ĸ����ԣ���������任�Ѷ��Ӽ�ת�ӱ����任��һ����ת����ϵ�У�������ϵ��ת��Ϊ���ٶȦء�
����fax, fbx, fcx Ϊ����˲ʱ������λ������120�ȵ�a,b,c�����ϣ�fqx, fdx, f0x Ϊ��任������λ����������d,q�ϣ�

�任����Ϊ��
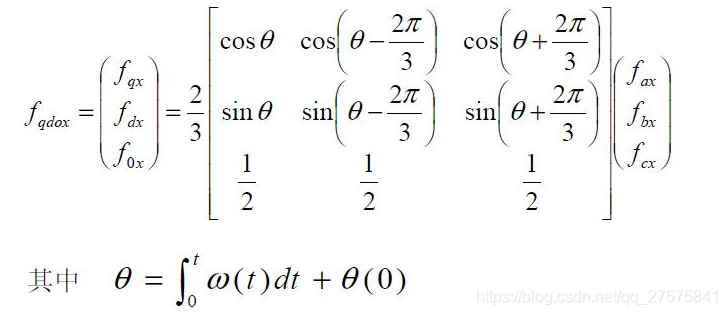
3���任��������ʸ�����ƣ�
Clarke: ��=0, ��(0)=0 -> ��=0;
Park: ��=��r, ��(0)=��r(0) -> ��=��r;
��Park: ��=-��r , ��(0)= ��r(0) ->��=-��r
�����У�Clarke�����ӵ���ת��Ϊ��ֱֹ�Dzο����꣨�Ʀ������꣩��Ȼ��Park������ת��Ϊ��������ٶ���ת������Ϊ���ų�������ƣ���ת��ͬ����������Park�任ʹ���綯�ƴ���ת���꣨q, d������ֹ���ꡣ�任��������ͼ��

Clark�任Ӧ���ڶ��ӵ�����

Park�任Ӧ���ڶ��ӵ�����
Park������任Ӧ���ڶ��ӵ�ѹ��

��������й��̣�
1��������ͨ�� ADC �������� BLDC ����� a��b ������е���������
2��ͨ�� Clarke���� ������ a��b �������ת��Ϊ��ֹ����ϵ�ϵĵ��� I����I�� ��
3���� Park���� ���������� I����I�� �;� DAC ת������ת�ǶȦ�ת��Ϊ���� Iq��Id��
4�������� Iq��Id �ĵ��������뵽������ PI �������ͨ�������ʵ��� PI ����ϵ�������ѵ���ת��ѹVd��Vq��
5���� Circle Limitation ������ Vd��Vq ��ֵ��ѡ��ǡ����ֵ��
6���� Rev_Park������������ת��ѹ Vd��Vq ת��Ϊ��ֹ����ϵ�ϵĵ�ѹV����V�£�
7��ͨ��������ʽ������ع�������ѹ V����V�� �����½���Ϊ BLDC ����������ѹ Ux��Uy��Uw �Ĵ�С��
8���� SV_PWM �㷨����ʸ������ַ�������������Ϣ��ͨ������ TIM ����6�� MOSFET �������Ƹ����ѹ�����Դﵽ���Ŀ���Ŀ�ġ�
�ġ������ļ��㣺
��������״̬�ļ��㷽ʽ���� N=4*C+2*B+A�� Nֵ�������Ķ�Ӧ��ϵ��

����ʸ������ʱ����������� PWM ���εĺϳɣ�
PWM ���ڼ�������ֵ------ΪNTpwm=fdsp/fs/2��
����ϵ����
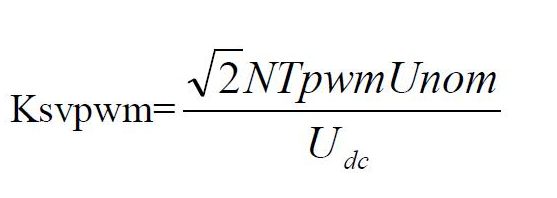
Unom Ϊϵͳ���ѹ���ߵ�ѹ��������Ƶ��Ϊ fs ��ϵͳʱ��Ϊ fc��������ѹ Udc����PWM���ڼ�������ֵ��NTpwm=fc/fs/2��
���е�ѹ��ֵ ��ʵ�ʵ�ѹ U=U'Ubase��U'Ϊ����ֵ�����Լ���õ�����������ʸ��������ʱ�䣺
��ʵ�ʵ�ѹ U=U'Ubase��U'Ϊ����ֵ�����Լ���õ�����������ʸ��������ʱ�䣺

�塢AD������
STM32 ��12λADC��һ����αƽ���ģ������ת���������ж��18��ͨ�����ɲ���16���ⲿ��2���ڲ��ź�Դ����ͨ����A/Dת�����Ե��Ρ�������ɨ�����ģʽִ�С�ADC�Ľ�������������Ҷ��뷽ʽ�洢��16λ���ݼĴ����С�
ADC�����������̣�
1������ǰ��Ҫ��ȡ��������ͨ���������ֵ���Խ��д�����У��
2��ADC��TIM1��Nͨ������������ʵ������������жϣ�������ģʽ��ͨ��FOC�����㷨��ò���ֵ���ü������ֵV����V�����ж�����������λ�ú�����PWM�����ռ�ձȣ�
ADC����ע��������ֻ�������ű۴�ʱ��SVPWM�ĵ�ǰ���������ö������������������ֻ����A��B�������C��ĵ���ͨ�� Ia+Ib+Ic=0 �ĵ��������ϵ�ó���
ÿ���űۿ���״̬�б仯ʱ������shunt�����ϵĵ�ѹ����һ�����Ӹ��ţ�ʱ�䳤��ΪTNoise���ҵ����ű۴���Ҫ�ȴ�һ��ʱ����ʹshunt�����ϵĵ�ѹ�ﵽ�ȶ�ֵ��ʱ�䳤��ΪTRise��������TNoise ��TRise�ڼ䲻�ܶ��������
�����������ʱ���������費һ�����Ҷ��ڱ为�ػ���λ�û���Ӧ�ã����������������˲�������á�
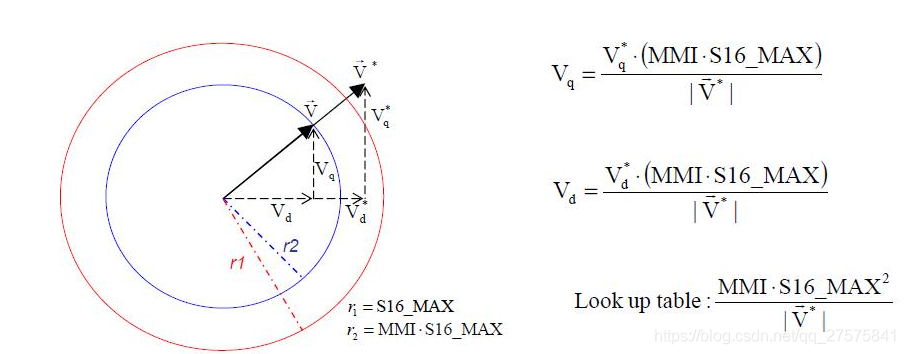
���������������
����FOC�㷨��Vqs��Vds����2��PID��������������ģ������Ҫ��ȷ�����ѹʸ��V��ʹ֮���뵽SVPWMģ�����ĵ�ѹ��ֵΪ��S16_MAX (����32767)��
�ߡ������������ԭ����
����һ���������Ӳ��ϵͳ��Ӳ���ļ�ͼ���£�
�������ű۵�ÿһ������״̬�����Ӧ��������������ĵ������1��T4, T5 ��T6 �Ŀ���״̬��T1, T2 ��T3�������ڱ�1�У� ֵ��0�� ��ʾ���عܹرգ�����1����ʾ���عܴ�


���������ɵ����PWM����ͼ��ʾ��

ʹ�����ĶԳ�ģʽ, ÿ��PWM ���ڱ��ֳ�7��ʱ��Σ�
• �����е�����ʱ���(I,IV,VII)�������еĵ���Ϊ0��
• �������ʱ��Σ�����PWMΪ���ĶԳ�ģʽ�������еĵ����ǶԳƵģ�
• ��ͼ��ʾ���������������
• ʱ���II ��VI�� iShunt = �CiC��
• ʱ���III ��V�� iShunt = iA��
• ��ˣ���ʱ�п��ܴӲ���ֵ�ؽ���������������
• ʱ���III ��V , iA = iShunt
• ʱ���II ��VI, iC = -iShunt
• iB = -iA - iC
���ڵ�������һ�����ȶ�ʱ�䣬������Ҫ�ܿ����ʱ�䡣
���塮TRise���� ��һ���ӿ��غ�ADCͨ���ϵ������źŵ���
��ʱ�䣻
����Tmin�� ִ�е�����������Ҫ����Сʱ�䣺����TRise +
ADC ����ʱ��+ ����ʱ�䣻
����DMIN ��TMIN��ռ�ձȵı�����ʽ

����ͼ���Կ�����AD��������Ҫ�ܿ������ȶ���ʱ��Σ�ͨ����ͨ����ʱһ��ʱ��������ʵ�ֵġ����ǣ�������������������ͻ����������������������⣺
1�����ڿռ�ʸ�������ı߽�����
.png)
�����ڵ������ռ�ʸ�������ı߽�����, �������ű۵�ռ�ձȼ�����ͬ��
����������£��߸���ʱ��α��������������ĺ��Ϊ��ֻ���ܲ���������������е�һ����
��ˣ������ѹʸ�����뵽��ͼ�Ļ�ɫ���Ͳ�����ͬһ��PWM������ͬʱ�����������������
2���͵��Ʊ�
�ڵ͵��Ʊȵ�����£������ű۵�ռ�ձȼ�����ͬ��
• ����������£��߸���ʱ��α����������
• �����е�����ʱ��Σ�������������ĵ���Ϊ0��
• �����ζ�ŵ���ѹʸ���������л�ɫ����ʱ�����������������
��ע: ������������κ�ʱ�̲���,�����ڴ������⡣

����FOC������ĵ��������ĺ�������Ҫ�����¼�����
|
������ |
���� |
����ʱ�� |
|
SVPWM_1ShuntInit |
��ʼ��PWM �� ADC ���� |
MCU��� |
|
SVPWM_1ShuntCurrent ReadingCalibration |
�洢�����ʱ������·��ADCֵ |
������������� |
|
SVPWM_1Shunt GetPhaseCurrentValues |
������A �� ��B�ĵ���ֵ |
��ADCת����ɺ�FOC �ӳ���֮ǰ |
|
SVPWM_1Shunt CalcDutyCycles |
����ռ�ձ�ֵ��������һ�ε��� ����ʱ��ADC����ʱ��ģʽ�� |
FOC �ӳ���֮�� |
|
SVPWMUpdateEvent |
��Update �¼��� ISR ��ִ�е� �ӳ��� |
�� Update �¼��� ISR �� |
|
SVPWMEOCEvent |
��ADCת�������¼��� ISR �� ִ�е��ӳ��� |
��ADCת�������¼��� ISR �� |