常见移动机器人运动学模型总结
原创 混沌无形 混沌无形 2021-08-06 11:41
文末有彩蛋【原文及其原文中所涉及文章的PDF(共9篇)免费下载】
01
图片
引言
图片
笔者已经对常见的移动机器人的运动学模型做了详尽的分析(感兴趣的读者可以在公众号中查看),本文仅对之前的分析做一个小总结。
常见的移动机器人如两轮差速驱动机器人、麦轮移动平台等,被应用于各种场景。笔者的逻辑是:由于不同实际场景的不同需求,促使工程师们绞尽脑汁从轮子构造、本体构型等角度设计了各式各样的移动机器人,而控制工程师们就想着控制移动机器人按照设定的方式运动。
移动机器人是靠多个轮子配合运动的,所以要“摸清楚”轮子之间怎么配合运动就能使得机器人按照工程师设计的方式运动,这就是所谓的移动机器人运动学模型。
简单地说,运动学模型就是一个数学公式,准确描述轮子转动与机器人机身运动之间关系,也深刻表达了机器人的运动机理和规律,工程师将这个公式转化为代码,就能准确控制机器人运动。
02
图片
运动学模型
图片
2.1
两轮差速驱动机器人

图 2.1 TurtleBot 3
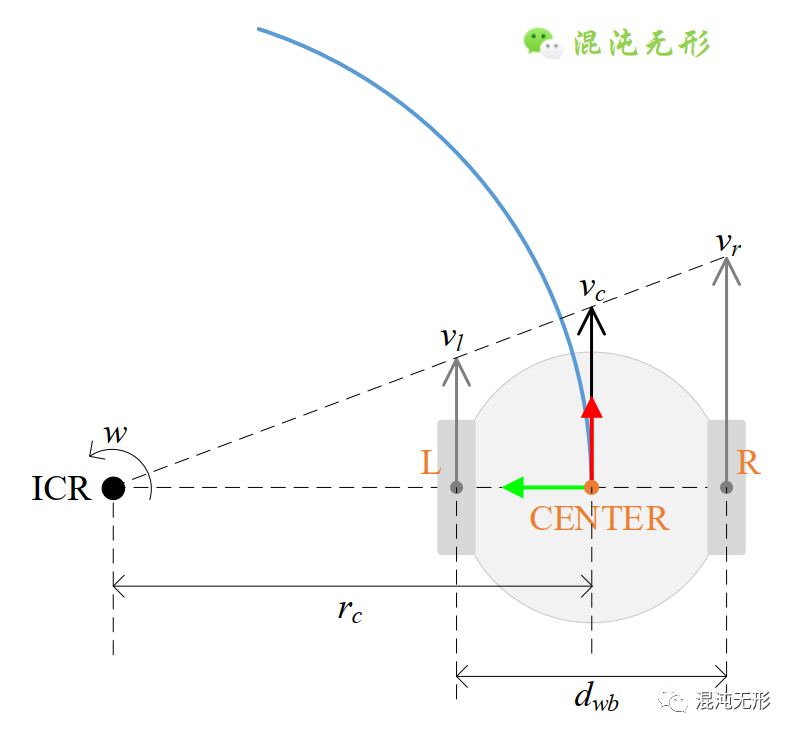
图 2.2 两轮差速驱动机器人运动模型
正运动学模型

逆运动学模型

原文
《两轮差速驱动机器人运动模型及应用分析》
2.2
Car-like Robot

图 2.3 MIT RACECAR
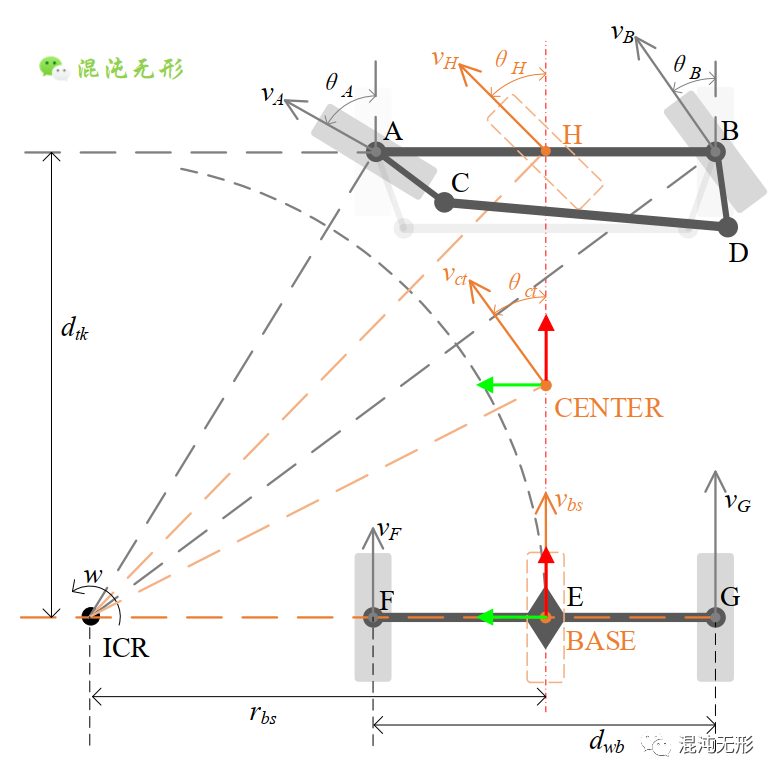
图 2.4 Car-like robot运动模型简图
正运动学模型
逆运动学模型

原文
《Car-like Robot运动模型及应用分析》
2.3
四轮驱动(SSMR)移动机器人

图 2.5 NERVA LG Robot
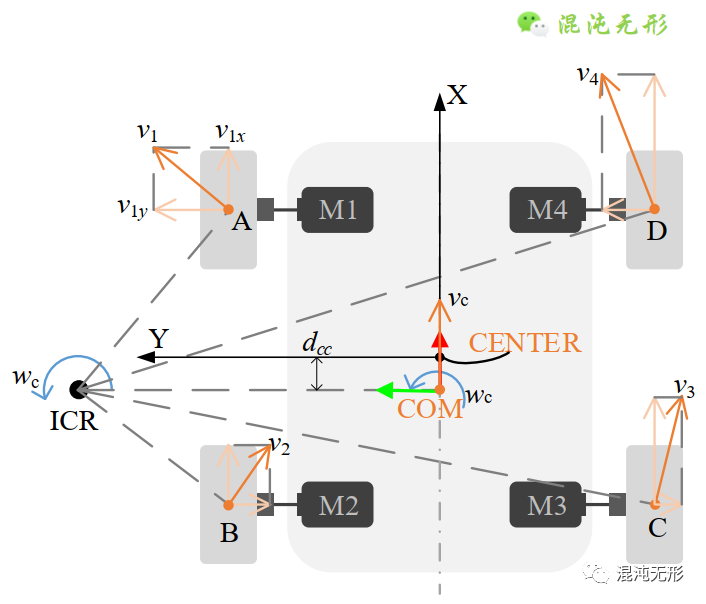
图 2.6 四轮驱动机器人运动模型简图
正运动学模型

逆运动学模型

原文
《四轮驱动(SSMR)移动机器人运动模型及应用分析》
2.4
履带式机器人

图 2.7 军事用途的履带式机器人
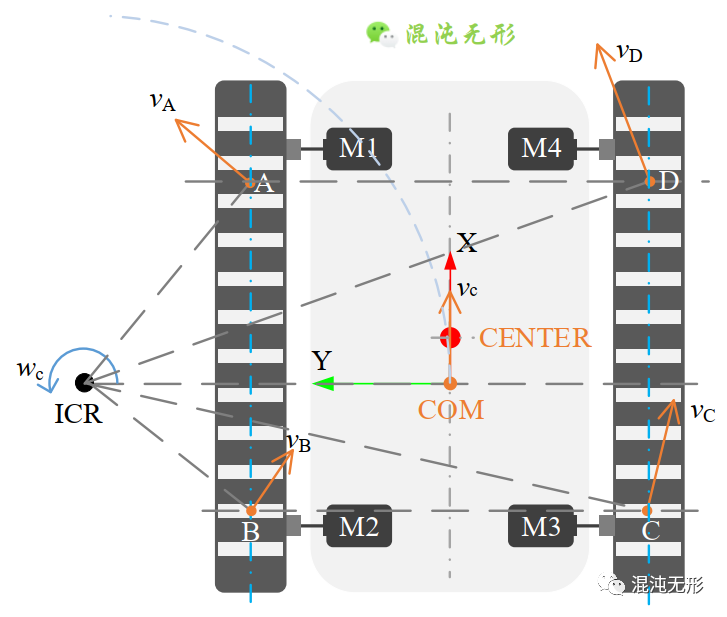
图 2.8 履带式机器人运动模型
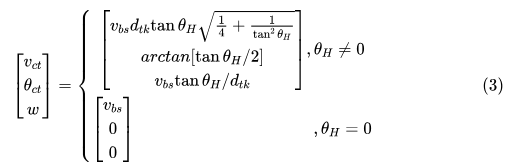
正运动学模型

逆运动学模型

原文
《履带式机器人运动模型及应用分析》
2.5
麦克纳姆轮全向移动机器人
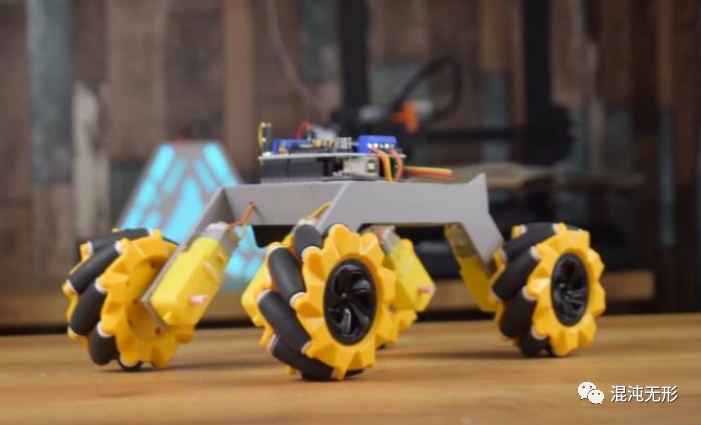
图 2.9 麦轮移动平台
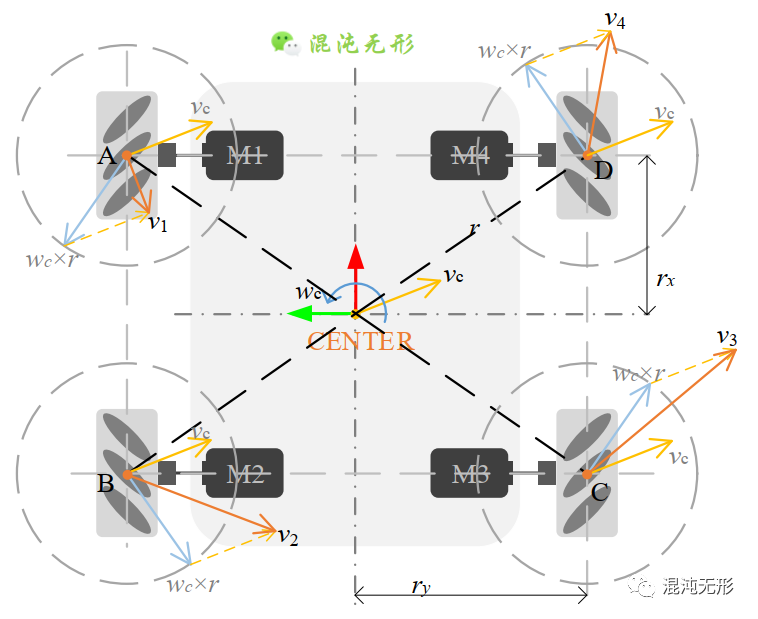
图 2.10 四轮驱动机器人运动模型
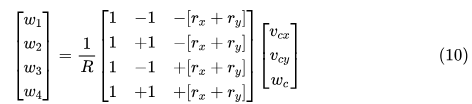
正运动学模型

逆运动学模型
原文
《麦克纳姆轮运动特性分析》
《麦克纳姆轮全向移动机器人运动模型及应用分析》
应用案例
DIY Mecanum Wheels Robot
2.6
全向轮移动机器人
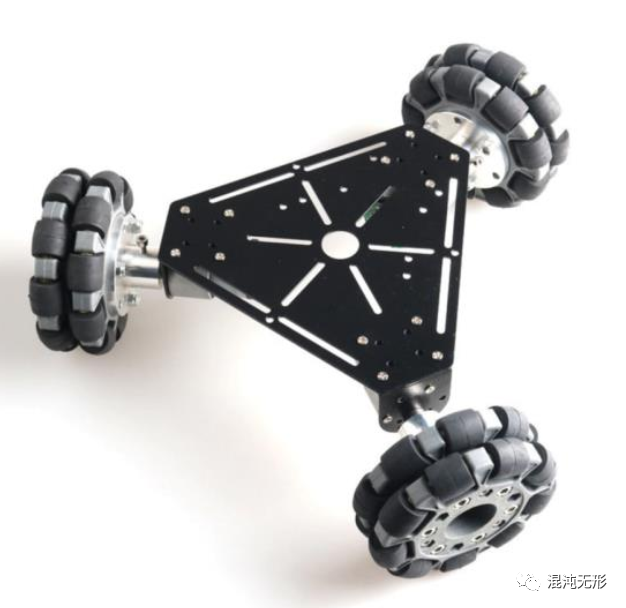
图 2.11 三轮构型全向轮移动平台
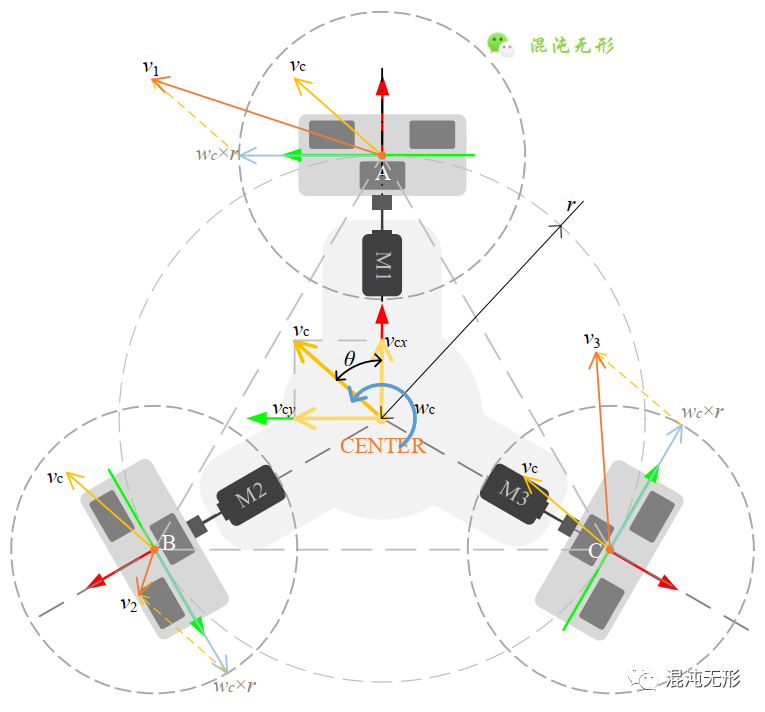
图 2.12 全向轮平台运动分解示意图
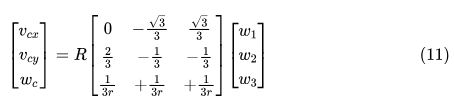
正运动学模型
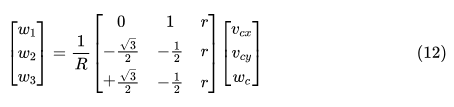
逆运动学模型
原文
《全向轮运动特性分析》
《全向轮机器人运动模型及应用分析》
应用案例
3D打印全向轮移动机器人
03
图片
总结分析
图片
不同的分析角度,有不同的建模方式,本文总述的只是其中一种。不同类型的机器人,对应的运动学模型是不一样的,但是分析方法、思路是相似的,要么从机器人中心速度分解到每个运动的轮子上,要么从轮子的运动情况倒推机器人中心运动的效果,分析过程就需要深入挖掘轮子运动规律、机器人本体构型特征等信息,再结合物理学中的速度分析方法,建立刚体上不同点之间速度的转化关系,就整理出运动学方程了。
(文章仅笔者个人分析,有误请指正,谢谢!)
福利放送
笔者为小伙伴们整理了原文及其原文中所涉及文章的PDF(共9篇),若有小伙伴需要收藏回味,请将此文转发至朋友圈,集齐10个点赞,并将截图发送至公众号后台或邮箱(Zippen-Huang@outlook.com),笔者会尽快回复。
图片
《Car-like Robot运动模型及应用分析》PDF部分截图