[ע����վ���ص�ijЩ���²���������վ֧�ֻ���۵��϶�����ʵ��]
�����Զ���ʻ�ͱ��õ�����ң�س�������ESP32��Arduino����ģ��  techff techff   �� 590 �� 0 ������ 2023-3-1 15:34:07 ֻ��������������� ��Arduino�����豸��M5Stack���ʹ�������������ң�س� �� 590 �� 0 ������ 2023-3-1 15:34:07 ֻ��������������� ��Arduino�����豸��M5Stack���ʹ�������������ң�س�
��1���֣���С��Arduino�����豸��M5Stack�����ܵ�����������Ȥ
��2���֣�ͨ��M5Stackʹ�õ��������
��3���֣�ͨ��M5Stackʹ�ô�����ʵ���Զ���ʻ���Զ����ù���
����ƪ��ʵ��M5Stack�������ֻ���������
��һ����
���������С��Arduino�����豸��M5Stack��ϵ��������һ��ԭ��ң�س�������ʹ�õ�M5Stack��һ��ʹ����ESP32��Arduino����ģ�飬�Դ�����������ʾ���������ʹ�����������ɿ�ʼ����������Ϊ��ҽ���һ��ʹ������M5Stack����Ҳ���Դ��ⲿ���Ƶ�����ң�س��Ĺ��̡�

�����ֵ�����
- ����Arduino�����豸M5Stackϵ��
- �������豸����IJ���
- ң�س��Ĺ��ܺͿ���ѧ����֪ʶ
- M5Stack����������װ
- �ܽ�
1. ����Arduino�����豸M5Stackϵ��
M5Stack�����й�����Ӳ��������˾M5Stack�Ƴ���Arduino���ݿ���ģ��֮һ����ʹ��Espressif��˾������Wi-Fi��BLE��ESP32ƽ̨��ʹ���������Arduinoһ�������ص�����СС�IJ�Ʒ�У��Դ���ʾ��������������ť��USB�ӿڵȡ�
M5Stack�ж��ϵ�У��û����Ը��ݴ�С����;����ѡ�����������ֵ��ǡ�M5 Stack Core���������нϴ�ķ�����ʾ��������С�M5 Stick-C����������Ǻ���ʾ���ߴ��С��������ʹ�á�2020�껹�Ƴ��˴��ֻ�С�M5 Stick-C��һ���С�ij�С�͡�ATOM��ϵ�С�

M5Stack Core
M5Stick-C
M5Stack ATOM Matrix
�±��н��⼸�ֲ�Ʒ�Ĺ�������һ�¡��������;�ͳߴ�ѡ�á�
| ϵ�� |
M5Stack |
M5Stick |
M5Stack ATOM |
| ���� |
M5Stack Core Gray |
M5Stick-C |
M5Stack ATOM Matrix |
| оƬ |
ESP32-D0WDQ6
(Wifi, BLE) |
ESP32-P IC O
(Wifi, BLE) |
ESP32-PICO
(Wifi, BLE) |
| �洢�� |
520KB RAM
16MB Flash |
520KB RAM
4MB Flash |
520KB RAM
4MB Flash |
| ��С |
5.4 x 5.4 x 1.7 cm |
4.8 x 2.5 x 1.4 cm |
2.4 x 2.4 x 1.4 cm |
| ��ʾ�� |
Color TFT LCD (2 inch) |
Color TFT LCD (0.96 inch) |
5 x 5 RGB LCD |
| �������� |
MPU6886�����ٶȴ�������
BMM150���شŴ�������
����˷�
�������� |
MPU6886�����ٶȴ�������
����LED
����˷�
�������� |
MPU6886�����ٶȴ�������
����LED
����˷�
�������� |
| ��� |
150mAh @3.7V |
80mAh @3.7V |
�� |
| �ο��۸� |
4,800��Ԫ���� |
2,000��Ԫ���� |
2,000��Ԫ���� |
2. �������豸����IJ���
������ǽ�ʹ��M5Stack��һЩ�����������������Զ���ʻ��Զ�̿��Ƶ�С�����������貿���������¡�
��������
| ���ƺ�˵�� |
���� |
M5Stack Core
������ESP32��Arduino�����豸�������Դ�����LED��ʾ�������Դ�BLE��Wifi���˶��������ȡ� |
 |
���������봫����
���䳬������ͨ���䷴�����������������ģ�顣 |
 |
ROHM�ն�/�ӽ�������
(RPR-0521RS)
(RPR-0521RS)
ͨ����������߲������䷴������������ǿ�Ⱥͽӽ��ȡ� |
 |
Grove I2C���������
ʹ�ó�Ϊ��I2C����ͨ�ŷ�ʽ����Grove�������Ӽ���ʹ�õĵ���������� |
 |
| ���֡���װ���� |
 | ң�ز��֣�
| ���ƺ�˵�� |
������Ӧ�� |
M5Stick-C
��M5Stackϵ���гߴ��С�IJ�Ʒ������BLE��Wi-Fi���ܵ�ESP32 Arduino����ģ�� |
 |
Blynk�������ֻ�Ӧ�ó���
����ͨ��Wi-Fi����Arduino��Raspberry Pi�������ֻ�Ӧ�ó��� |
 | ����Щ�������úͿ�������С��ң�س��ˡ�
3. ң�س��Ĺ��ܺͿ���ѧ����֪ʶ
���Ҫ����ң�س���Ϊ�����������ֺ�ң�ز��������֡��������ֽ�ʹ�ô������Զ���ʻ��ң����ʹ��M5Stcick-C�������ֻ���ʵ�ֶ������Ŀ��ơ������г��˳������ֺ�ң�ز��ֿ���ʵ�ֵĹ��ܣ��Լ�����ѧ����֪ʶ��
�������֣�
| ��� |
����ѧ����֪ʶ |
| 1 |
ʹ��Arduino IDE����M5Stack�ķ��� |
| 2 |
ʹ��I2C�����������ͨ��Arduino���Ƶ��������С�����ķ��� |
| 3 |
ʹ���˾��봫������������û��� |
| 4 |
ʹ���ն�/�ӽ�������������������ϵȸߴ��������Ļ��� | ң�ز���
| ��� |
����ѧ����֪ʶ |
| 1 |
ʹ��M5Stackʱ���˶�������ʹ�÷��� |
| 2 |
Arduino��M5Stack��֮��ͨ��BLE����ͨ�źͲ����ķ��� |
| 3 |
�������ֻ��ϲ���Arduino��M5Stack���ķ��� |
4. M5Stack����������װ
Ҫ��ʹ��Arduino IDE����M5Stack��������Ҫ����һЩ��Ҫ������������ǰ��Arduino IDE����ҳ�棨https://www.arduino.cc/en/main/software�����ز���װ���������⣬�����ǰ�˽�һ��ESP-WROOM-32��ʹ�÷�����

[Arduino IDE�����ؽ��� https://www.arduino.cc/en/main/software ]Arduino IDE��װ��ɺ���Ҫ����ESP32�����塣��Arduino�IJ˵��У�ѡ������ > Preferencees�����ڡ� Additional Boards Manager URL�����������µ�ַ��
https://dl.espressif.com/dl/package_esp32_index.json

Ȼ��ͨ��Tools > Boards > Boards Manager����ESP32����װ��������

�����Ϳ���ѡ��M5Stack-Core-ESP32��Ϊ�������ˣ���ѡ���������⣬�Ӵ���ָ��USB���Ӳ����ӵ��Ժ�M5Stack��

���⣬����Ҫͨ��Sketch > Include Library > Manage Library����������M5Stack�Ŀ⡣

���ڣ���������USB-C���������ӵ��Ժ�M5Stack�ɡ��ո����ص�M5Stack���и���һЩʾ���������ǿ���ֱ��ʹ�á���File > Sketch example > M5Stack��ѡ��ʾ����ͼ�����䵼�롣


[����ֱ��ǣ�M5Stack Core Gray��M5Stcik-C��M5Stack ATOM Matrix]
5. �ܽ�
�ڱ�ϵ�������У����ǽ�ʹ��M5Stack����ң�س���M5Stackϵ�����Դ��������IJ�Ʒ��Ҳ�д��ϴ���ʾ���IJ�Ʒ�������������;ѡ�á�������Ҳ���Դ��ⲿ��װ����˻�����ͨ������ROHM�Ĵ����������������ӹ��ܡ�
����һ���ֿ�ʼ���ҽ�Ϊ��ҽ���ʵ������ң�س��Ĺ��̣������ڴ���
���ڶ����֣�
ͨ��M5Stackʹ�õ��������
��ϵ�����ؽ�Ϊ������ʹ��С��Arduino�����豸M5Stack����ң�س��Ĺ��̡��ڵڶ������У����ǽ�����M5Stack�͵������������ʹֱ�������ת������ʹ��һ����Ϊ��Grove���ı����ţ���ʹ���Ƹ��ӵĵ�����������ñ�÷dz���

ʹ��M5Stackϵ������ң�س�
�����ֵ�����
- ���������������
- M5Stack����������
- ����M5Stack�ij���
- �ܽ�
���������貿��
M5Stack Core
������ESP32����ʾ�����������ȵ�Arduino�����豸

Grove I2C���������
ʹ�á�I2C��ͨ�ŷ�ʽ��Grove�������Ӽ���ʹ�õĵ��������

9V��غ͵�غ�

С�͵�������ֵ�
1. ���������������
����������ң�س�ʱ����Ҫһ����Ϊ���������������IC��������������ֱ�����������ת�ٵȹ����������������Arduino֮��������Լ�������е㸴�ӣ�����M5Stack����Grove���ţ�ͨ��ʹ�ÿ�����Grove�����ӵĵ�����������������ɽ��е�����ơ�
������ǽ�ʹ�ô���Grove���ŵġ�I2C���Ʒ�ʽ���������������

��Ҫ���뿪���������������SEEED��˾�IJ�Ʒҳ�棬����ȡ���ļ����뵥������ҳ���е�Grove I2C Motor Driver���������ص����ļ�����ϡ�
https://wiki.seeedstudio.com/Grove-I2C_Motor_Driver_V1.3/

�Ӳ˵��ϵ�Sketch > Include library > Add .ZIP Library��ѡ��ǰ���ᵽ���ļ���Ӧ�á�

�����Ѱ�װ���˿��ʾ����ͼ���ڲ�ͼʾ���˵�����һ����Ϊ��dcmotor_test����ʾ����ѡ����������д��M5Stack��

��Ҫ���ӵ��ԡ�M5Stack �͵��������֮�����д�롣�������续���е���Ϣʱ����������������IJ�ͼ�Ѿ��ɹ�д�롣

2. M5Stack����������
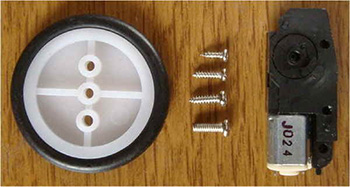
��ֱ��������ӵ�M5Stack�͵���������������������֣�����ʹ�ó����Ѿ���dz�С�ĵ�����Ӻõij��ֵ������������ֵ���̶�����غ��ϣ�������ʵ����һ�廯������ң�س���

����ͳ�������

������͵�غй̶�������˿š����
�����������2�����¡���غг�����1�����·ֱ��������������ӡ�

���ӵ���������

���� ��Դ �������
���ڣ���������������ֺ͵�غ��������ģ�

��M5Stack��ҲҪ��װС���֡�ʹ��Grove�������ӵ����������M5Stack��

�������£�

3. ����M5Stack�ij���
���������Ҫ��������������M5Stack��M5Stack��һ����ʾ��������������ң�س���ʻ����������Ļ����ʾ��Ӧ�����ݡ�ʾ������M5_Motor.ino���£�
- #include "Grove_I2C_Motor_Driver.h"
- #include <M5Stack.h>
- #define I2C_ADDRESS 0x0f
- void setup() {
- Serial.begin(9600);
- Motor.begin(I2C_ADDRESS);
- M5.begin();
- M5.Lcd.setTextSize(4);
- M5.lcd.print("GO M5!");
- }
- void loop() {
- // Set speed of MOTOR1, Clockwise, speed: -100~100
- Motor.speed(MOTOR1, 100);
- // Set speed of MOTOR2, Anticlockwise
- Motor.speed(MOTOR2, -100);
- M5.lcd.clear();
- M5.Lcd.setCursor(10,0);
- M5.lcd.print("GO M5!");
- M5.Lcd.setCursor(10,60);
- M5.lcd.print("Forward!");
- delay(2000);
- // Change speed and direction of MOTOR1
- Motor.speed(MOTOR1, -100);
- // Change speed and direction of MOTOR2
- Motor.speed(MOTOR2, 100);
- M5.Lcd.setCursor(10,60);
- M5.lcd.print("Backward!");
- delay(2000);
- // Stop MOTOR1 and MOTOR2
- Motor.stop(MOTOR1);
- Motor.stop(MOTOR2);
- M5.lcd.clear();
- M5.Lcd.setCursor(10,60);
- M5.lcd.print("Stop!");
- delay(2000);
- }
�������ú��䵼�� M5Stack����Դ����Ӧ�ÿ�ʼת���ˡ�

��ǰת��ʱ��ʾ��Forward�������ת��ʱ��ʾ��Backword����


4. �ܽ�
�������������С�ͳ��ֵ��ʵ����ǰ��������ʻ����Ȼ��Ҫ�õ��������������Arduino��ֱ������������������Ѿ��˽�ˣ�ֻ�轫����Grove�������Ӽ������ɿ�ʼʹ�á�
M5Stack��Grove���ſ������Ӹ����������ʹ������ȣ�����������Գ�������������������
����һ�����У����ǽ�ͨ����װ���봫��������������ʵ�ֱ���ǽ�ڡ�����������ϵ�������Ŀ�ꡣ�Զ���ʻ����ʵ�֣������ڴ���
(��������)
ͨ��M5Stackʹ�ô�����ʵ���Զ���ʻ���Զ����ù���
��ϵ�����ؽ�Ϊ������ʹ��С��Arduino�����豸M5Stack����ң�س��Ĺ��̡�������ǽ���M5Stack�����Ӹ��ִ��������Ա�ʵ���Զ����ơ�M5Stack�кܶ����ţ���˽������ӽ�����������봫������������������Ӧ�Ĺ��ܡ�


��M5Stack�ϰ�װ���봫�����ͽӽ���������ʵ���Զ���ʻ
�����ֵ�����
- �նȡ��ӽ�һ���ʹ�����������
- ���봫����������
- �ô��������в�����ͬʱ�Զ���ʻ
- �ܽ�
���������貿��M5Stack Core
������ESP32����ʾ�����������ȵ�Arduino�����豸

ROHM���նȡ��ӽ�һ���ʹ����� (RPR-0521RS)
ͨ���������Ⲣ�����䷴�����������ǿ�ͽӽ��̶ȡ�

���������봫���� (HC-SR04)
���䳬������ͨ���䷴�����������������ģ�顣

Grove I2C���������
ʹ�á�I2C��ͨ�ŷ�ʽ��Grove�������Ӽ���ʹ�õĵ��������

9V��غ͵�غ�

С�͵�������ֵ�

1. �նȡ��ӽ�һ���ʹ�����������
��ϣ��ң�س�����ʻʱ���ڼ���ײ���ϰ�����������ϵ�����������£��ܹ��Զ����ò�������䡣
���ȣ�����ʹ�ýӽ����������ж��Ƿ����䡣�ӽ�������������ROHM�������������е��նȡ��ӽ�һ���ʹ�����ģ�飨RPR-0521RS����

�ô�����ͨ���������LED�Ⲣ����䷴�������������ȵĽӽ��̶ȡ����⣬������ͨ�����ȴ�������ͬʱ�������ȡ�
Ҫʹ�øô���������Ҫ���������ROHM������ҳ�沢����Arduino�õĿ⡣
https://www.rohm.com.cn/sensor-shield-support/ps-als-sensor
��ROHM����������zip�ļ���ͨ����˵���װArduino IDE�⡣

�����������ǰ�M5Stack�ʹ���������������M5Stack������8�����ţ�������15�����ţ�����д���������б�š�Arduino��GPIO������������ţ������ֱ�ע�����ű�����Ӧ��

M5Stack�������������ͼ�նȡ��ӽ�һ���ʹ�����ʹ�á�I2C��ͨ�ŷ�ʽ��������M5Stack�·������е�SDA=G21��SCL=G22����I2Cͨ�š��밴���±����Ӵ�������M5Stack��
������������
(����) |
M5Stack��
���·��� |
| VDO |
3.3V (��) |
| GND |
GND (��) |
| SDA |
GPIO21 (��) |
| SCL |
GPIO22 (��) |
| INT |
NA | 
��������M5Stack���Ӻ�֮��Arduino IDE�IJ�ͼʾ����ѡ��ǰ�氲װ��ʾ��PRP-0521RS��
���ӵ�ʾ����֮����Ҫ��M5Stack����ʾ������ʾ�ȣ�����Ҫ��������Ϊ��M5Stack_PRP-0521RS.ino�����������������³���1��11〜14��20��29〜30��36��39�У���
��M5Stack�õĿ⡣Wire.begin(21,22)��Ϊ��ʹM5Stack�ܹ�ʹ��I2Cͨ�ŷ�ʽ��������
[M5Stack_PRP-0521RS.ino]
- #include <M5Stack.h>
- #include <Wire.h>
- #include <RPR-0521RS.h>
- RPR0521RS rpr0521rs;
- void setup() {
- byte rc;
- Serial.begin(115200);
- while (!Serial);
- Wire.begin(21,22);
- M5.begin();
- M5.Lcd.setTextSize(2);
- M5.Lcd.setRotation(3);
- rc = rpr0521rs.init();
- }
- void loop() {
- Wire.begin(21,22);
- byte rc;
- unsigned short ps_val;
- float als_val;
- byte near_far;
- rc = rpr0521rs.get_psalsval(&ps_val, &als_val);
- if (rc == 0) {
- Serial.print(F("RPR-0521RS (Proximity) = "));
- M5.Lcd.setCursor(10, 20);
- M5.Lcd.printf("RPR-0521RS: ");
- Serial.print(ps_val);
- Serial.print(F(" [count]"));
- near_far = rpr0521rs.check_near_far(ps_val);
- if (near_far == RPR0521RS_NEAR_VAL) {
- Serial.println(F(" Near"));
- M5.Lcd.printf("M5 Near!");
- } else {
- Serial.println(F(" Far"));
- M5.Lcd.printf("M5 Far !");
- }
- }
- delay(500);
- }
ͨ��M5Stackʹ�øó���ʱ����Ҫ����һ����ļ���PRP-0521RS.cpp����ɾ����#include�������еġ�avr/����ͨ����װ�Ŀ�λ��Arduino > Libraries > RPR-0521RS�У������иò�����M5Stack�Ϳ���������ȡpgmspace.h�ˡ�
[PRP-0521RS.cpp��λ�ã�����ǰ��ɾ����ֵġ�avr/���� ]

��ɸø��ĺ����С�M5Stack_PRP-0521RS.ino�������Ὺʼ�Զ���������������ָ�����豸ʱ����Ļ�ϻ������ͼ��ʾ�ġ�Near������Ϣ��

����ָ����ʱ���������Near������֪�����ж���
2. ���봫����������
��������������M5Stack�ϰ�װ���봫�������Ա��ܹ������������ϰ������ʹ��������Ϊ��HC-SR04���ij��������봫����������һ���ܹ����䳬������ͨ���䷴�����������������ģ�顣

�����±�����Ƭ��ʾ���Ӹó�������������
������������
(����) |
M5Stack��
�������棩 |
| VCC |
5V (��) |
| Trig |
GPIO2 (��) |
| Echo |
GPIO5 (��) |
| GND |
GND (��) | 
����������봫�����ij���M5Stack_Dist.ino�����¡�����G2�����TRIG���ӣ�G5������ECHO���ӣ���˳����зֱ�ָ����GPIO��š�
- [M5Stack_Dist.ino]
- #include <M5Stack.h>
- #define TRIG 2
- #define ECHO 5
- int times;
- int distance;
- void setup() {
- Serial.begin(115200);
- while (!Serial);
- pinMode(TRIG, OUTPUT);
- pinMode(ECHO, INPUT);
- M5.begin();
- M5.Lcd.setTextSize(2);
- M5.Lcd.setRotation(3);
- }
- void loop() {
- // ���䳬����
- digitalWrite(TRIG, HIGH);
- delayMicroseconds(10);
- digitalWrite(TRIG, LOW);
- // ���ճ�����
- times = pulseIn(ECHO, HIGH);
- distance = (int)(times * 0.017);
- // �ڼ���������ʾ������ʾ
- Serial.println(distance);
- M5.Lcd.setCursor(0, 0);
- M5.Lcd.print(distance);
- delay(500);
- }
���иó�������ָ�������봫����ʱ���ͻ���������롣�þ������ݱ�ʾ���ڼ�������M5Stack��Ļ���ֵ��ϰ���֮��ľ��롣

�ڴ��ڼ���������M5Stack��Ļ���ң�����ʾ�������ľ���
3. �ô��������в�����ͬʱ�Զ���ʻ
���Ҫ�ܹ����ݴ������IJ���������п��ƣ��Ա����ϰ��ﲢ����������ϵ������������ȣ�������Ҫ����������������ֵ���ͬ�������������������������������������Grove�����ϣ������봫�������������ײ�ǰ�������λ�ã����ӽ��������������·���

��Ҫ����һ��ʹ�������͵�������ij����ڳ����У������봫���������С��5cmʱ�����ж�Ϊ���������ϰ�������⣬���ӽ���������������ذ�֮��Ľӽ��̶ȱ�Ϊ��Far��ʱ�����ж�Ϊ�����������ӱ�Ե���䡱����ʱ��������ᷴת���Ա�����䣨�����ϰ����������ǰ����
ʾ������M5Stack_Near_Dist_Motor.ino�����£�
- #include <M5Stack.h>
- #include <Wire.h>
- #include <RPR-0521RS.h>
- RPR0521RS rpr0521rs;
- #define TRIG 2
- #define ECHO 5
- int times;
- int distance;
- #include "Grove_I2C_Motor_Driver.h"
- #define I2C_ADDRESS 0x0f
- void setup() {
- Serial.begin(115200);
- while (!Serial);
- byte rc;
- rc = rpr0521rs.init();
- pinMode(TRIG, OUTPUT);
- pinMode(ECHO, INPUT);
- Motor.begin(I2C_ADDRESS);
- Wire.begin(21,22);
- M5.begin();
- M5.Lcd.setTextSize(4);
- M5.Lcd.setCursor(10,0);
- M5.lcd.print("M5 Near Dist Motor");
- }
- void loop() {
- Wire.begin(21,22);
- byte rc;
- unsigned short ps_val;
- float als_val;
- byte near_far;
- M5.lcd.clear();
- M5.Lcd.setCursor(10,0);
- M5.lcd.print("M5 Near Dist Motor");
- M5.Lcd.setCursor(10,50);
- rc = rpr0521rs.get_psalsval(&ps_val, &als_val);
- if (rc == 0) {
- Serial.print(F("RPR-0521RS (Proximity) = "));
- Serial.print(ps_val);
- Serial.print(F(" [count]"));
- near_far = rpr0521rs.check_near_far(ps_val);
- if (near_far == RPR0521RS_NEAR_VAL) {
- Serial.println(F(" Near"));
- M5.lcd.print("Near!");
- } else {
- Serial.println(F(" Far"));
- M5.lcd.print("Far!");
- }
- }
- // ���䳬����
- digitalWrite(TRIG, HIGH);
- delayMicroseconds(10);
- digitalWrite(TRIG, LOW);
- // ���ճ�����
- times = pulseIn(ECHO, HIGH);
- distance = (int)(times * 0.017);
- // ����ʾ������ʾ
- Serial.println(distance);
- M5.Lcd.setCursor(10, 100);
- M5.Lcd.print(distance);
- M5.Lcd.setCursor(10,150);
- // ������С��6ʱ������ӽ��̶ȼ������ʹ�����ת
- if ( ((distance > 0) and (distance < 6)) or (near_far != RPR0521RS_NEAR_VAL) ) {
- Motor.speed(MOTOR1, 100);
- Motor.speed(MOTOR2, -100);
- delay(800);
- Motor.speed(MOTOR1, 100);
- Motor.speed(MOTOR2, 100);
- M5.lcd.print("Danger!");
- delay(800);
- } else {
- // ���û���ϰ���ͼ���ǰ��
- Motor.speed(MOTOR1, -100);
- Motor.speed(MOTOR2, 100);
- M5.lcd.print("Forward!");
- }
- delay(300);
- }
�������ú��䵼��M5Stack��������ͨ��Դ���ֽ���ʼת������ǰ��ʻ������ȷ��һ�£���ң�س������ϰ����Ҫ�������ϵ�������ʱ������ܷ�ת��

4. �ܽ�
���������ϵ���У���Ϊ������ʹ��M5Stack����ң�ز�ʵ���Զ���ʻС�����������̡��ڵ��������У�����ʹ�þ��봫������ȷ����ǰ�����壬��ʹ�ýӽ���������ȷ���˽ӽ������
���ǻ��������ִ������͵������ת����ʵ�����Զ���ʻ����ô����Ч���������ɣ����ڻ���Ҫ�����ϰ���֮��ľ������á���תʱ��Ȳ������������Ҫһ������һ�ߵ�����ֵ��
M5Stack��Ȼ�п���ʹ�õ����ţ�����������Գ�������������������ʵ����Ӧ�Ĺ��ܣ�����ܻ����Ȥ�����磬����������������ʻ��ͬʱ���������¶ȺͿ������ȡ�
����һ�����У����ǽ�����ͨ�������ֻ��ȴ��ⲿ������ң�س��ķ����������ڴ���
������ƪ��
ʵ��M5Stack�������ֻ���������
��ϵ�����ؽ�Ϊ������ʹ��С��Arduino�����豸M5Stack����ң�س��Ĺ��̡���ǰ��IJ����У������Ѿ��õ����������ң�س��ܹ�ǰ�������ƶ�����ͨ��������ʵ�����Զ���ʻ���ڱ����У�Ҳ���DZ�ϵ�е����һ�����У����ǽ�ʵ�ִ��ⲿң������ң�س�����Σ����ǽ��ᵼ��һ���ܹ�ͨ�������ֻ�����5Stack����Ϊ��Blynk���Ļ��ơ�

M5Stack�������ֻ�������ң�س�
�����ֵ�����
- ���������ֻ�Ӧ�ó���Blynk��
- ��Wi-Fi������ͨ�������ֻ�����M5Stack
- ���Ӳ��ݵ���õIJ��ݸ�
- �ܽ�
���������貿��M5Stack Core
������ESP32��Arduino�����豸

Grove I2C���������
��Grove�������Ӽ���ʹ�õĵ��������

ROHM���նȡ��ӽ�һ���ʹ����� (RPR-0521RS)
ͨ������������������ǿ�ͽӽ��̶ȡ�

���������봫���� (HC-SR04)
ͨ�����䳬���������������ģ��

С�͵�������ֵ�

9V��غ͵�غ�

1. ���������ֻ�Ӧ�ó���Blynk��
������Ҫ������Ϊ��Blynk����Ӧ�ó����Ա�ͨ�������ֻ�������M5Stack�������ɵ�ң�س�����iOS��Androidϵͳ����������װBlynkӦ�ó���

���غ�Ӧ�ó��ᱻҪ��һ���ʻ����������������ע�Ტ��¼���ڵ�һ�������У�����֡�New Project������Ҫ������������������Ŀ��

����ϸ�����У�Device��ѡ��ESP32 Dev Board����Connection��ѡ��WiFi����Ȼ�������һ���հ���Ŀ���棬��ͱ��������ֻ�������������ˡ�

����������Ҫ��̵�Arduino IDE�У���ȡArduino�õ�Blynk�⡣��������������ؿⲢͨ��ͼ�в˵�����zip�ļ���
Blynk��Githubҳ�� https://github.com/blynkkk/blynk-library

���ڣ��Ѿ��������ֻ���Arduino IDE��ʹ��Blynk�����ˡ�
2. ��Wi-Fi������ͨ�������ֻ�����M5Stack
�����Ѿ���M5Stack�������ֻ����������ˣ�������Ҫ�ڻ���������һ���������ܡ�
�����BlynkӦ�ó���Ļ���ʱ������ֿ��Դ��Ҳ����ӵ�Widget�����ܣ������������ӡ�Button����

�������ϣ���ڰ��¸ð�ťʱ�ܹ���M5Stack�������������������ڰ�ť����ϸ���û����ϣ�OUTPUTѡ��Virtual����ָ��V1���Ժ���M5Stack��ָ��V1���������ס��������á���������ѡ����ڰ���ʱ�����źŵġ�PUSH���������ñ�ǩ���ƣ�Beep���ȡ�


��δ���°�ť��״̬ �ң����°�ť��״̬
���Ҫ��ȡһ����M5Stack���ӵ����ơ����ƿ�������Ŀ����ʱͨ��e-mail���ͣ�Ҳ��ͨ����Project Settings�������·��ġ�AUTH TOKEN�����Ժ�ͨ��Arduino IDEָ����

���ڣ���Ҫʹ��Arduino IDE���б���ˡ����ȣ�����һ����Ϊ��Speaker���IJ�ͼʾ����ΪM5Stack��ʾ����
�ڸ�ʾ�����������µ�3〜9��13〜22��28〜29��36�е����ݡ��ڲ�ͼ��xxxx��������ǰ�渴�Ƶ�AUTH TOKEN��yyyy��zzzz����Wifi�������û��������롣���⣬������V1��ťʱ��Ҫ������������
- [M5Stack_Speaker_Blynk.ino]
- #include <M5Stack.h>
- #include <WiFi.h>
- #include <WiFiClient.h>
- #include <BlynkSimpleEsp32.h>
- char auth[] = "xxxx��; //����BlynkӦ�ó����YourAuthToken
- char ssid[] = "yyyy"; //����Wifi��ID������
- char pass[] = "zzzz";
- #define NOTE_DH2 661
- int BEEP_Flag = 0;
- BLYNK_WRITE(V1)
- {
- BEEP_Flag = param.asInt();
- if(BEEP_Flag == 1){
- M5.Lcd.printf("Blynk wasPressed \r\n");
- M5.Speaker.beep(); //beep
- }
- M5.update();
- }
- void setup() {
- // Initialize the M5Stack object
- M5.begin();
-
- M5.Lcd.setTextSize(3);
- Blynk.begin(auth, ssid, pass);
-
- M5.Power.begin();
- M5.Lcd.printf("M5Stack Speaker:\r\n");
- }
- void loop() {
- Blynk.run();
-
- if(M5.BtnA.wasPressed()) {
- M5.Lcd.printf("A wasPressed \r\n");
- M5.Speaker.beep(); //beep
- }
- if(M5.BtnB.wasPressed())
- {
- M5.Lcd.printf("B wasPressed \r\n");
- M5.Speaker.tone(NOTE_DH2, 200); //frequency 3000, with a duration of 200ms
- }
- M5.update();
- }
���д˳����Wi-Fi�������ʱ���ڴ��ڼ������ϻ���ʾ���л��档���������ֻ���ͬ��Wifi�����£������Blynk����M5Stack����������Ļ�ϵİ�ťʱ��Ӧ�ûᷢ��������

3. ���Ӳ��ݵ���õIJ��ݸ�
���ڣ�������Ҫ����һ��ͨ�������ֻ�����M5Stack�ĵ���Ĺ��ܡ����ֳɵġ�Joystick�������ݸˣ��������������н��������ת�ٶȣ����ǿ������ֻ������϶���������á�Joystick�����ΪV0�����������Χ����Ϊ-50��50��

�����Ҫ��дͨ��Blynk����M5Stack�ij���Blynk���������ӵ�����һ�����д����Ĵ��������������ij���M5Stack_Near_Dist_Motor.ino���С�����ĵ�15〜31��96��116����ǰ������������õIJ��֡��ڵ�33〜93��111〜112��123〜126��162〜163�������˸���Joystick���Ƶ����������
- [M5Stack_Near_Dist_Motor_Blynk.ino]
- #include <M5Stack.h>
- #include <Wire.h>
- #include <RPR-0521RS.h>
- RPR0521RS rpr0521rs;
- #define TRIG 2
- #define ECHO 5
- int times;
- int distance;
- #include "Grove_I2C_Motor_Driver.h"
- #define I2C_ADDRESS 0x0f
- #include <WiFi.h>
- #include <WiFiClient.h>
- #include <BlynkSimpleEsp32.h>
- char auth[] = "xxxx��; //����BlynkӦ�ó����YourAuthToken
- char ssid[] = "yyyy"; //����Wifi��ID������
- char pass[] = "zzzz";
- int BEEP_Flag = 0;
- BLYNK_WRITE(V1)
- {
- BEEP_Flag = param.asInt();
- if(BEEP_Flag == 1){
- M5.Lcd.printf("Blynk wasPressed \r\n");
- M5.Speaker.beep(); //beep
- }
- M5.update();
- }
- long Speed;
- long Speed1, Speed2;
- long SpeedL, SpeedR;
- //���ղ��ݸ˵�����
- BLYNK_WRITE(V0) {
- M5.Lcd.setCursor(10,180);
- long x = param[0].asInt();
- long y = param[1].asInt();
- Speed = sqrt(x*x+y*y);
- if(Speed > 50){
- Speed = 50;
- }
- SpeedR = Speed - Speed1;
- SpeedL = Speed - Speed2;
- if(y >= 0){
- if(x >= 0){
- Speed1 = abs(x);
- Speed2 = 0;
- }else{
- Speed1 = 0;
- Speed2 = abs(x);
- }
- Serial.print(" R:");
- Serial.print(SpeedR);
- Serial.print(" L:");
- Serial.println(SpeedL);
-
- Motor.speed(MOTOR1, -SpeedR);
- Motor.speed(MOTOR2, SpeedL);
-
- M5.Lcd.print("Fwd!");
-
- delay(500);
- Motor.speed(MOTOR1, 0);
- Motor.speed(MOTOR2, 0);
-
- }else{
- if(x >= 0){
- Speed1 = abs(x);
- Speed2 = 0;
- }else{
- Speed1 = 0;
- Speed2 = abs(x);
- }
- Serial.print(" -R:");
- Serial.print(SpeedR);
- Serial.print(" -L:");
- Serial.println(SpeedL);
-
- Motor.speed(MOTOR1, SpeedR);
- Motor.speed(MOTOR2, -SpeedL);
-
- M5.Lcd.print("Back!");
- delay(500);
- Motor.speed(MOTOR1, 0);
- Motor.speed(MOTOR2, 0);
- }
- }
- void setup() {
- Blynk.begin(auth, ssid, pass);
- Serial.begin(115200);
- while (!Serial);
-
- byte rc;
- rc = rpr0521rs.init();
-
- pinMode(TRIG, OUTPUT);
- pinMode(ECHO, INPUT);
- Motor.begin(I2C_ADDRESS);
- M5.begin();
- M5.Lcd.setTextSize(4);
- Wire.begin(21,22);
- M5.Lcd.setCursor(10,0);
- M5.Lcd.println(ssid);
- }
- void loop() {
- Blynk.run();
-
- byte rc;
- unsigned short ps_val;
- float als_val;
- byte near_far;
- M5.lcd.clear();
- M5.Lcd.setCursor(10,0);
- M5.lcd.print("M5 Blynk");
- M5.Lcd.setCursor(10,50);
-
- rc = rpr0521rs.get_psalsval(&ps_val, &als_val);
- if (rc == 0) {
- Serial.print(F("RPR-0521RS (Proximity) = "));
- Serial.print(ps_val);
- Serial.print(F(" [count]"));
- near_far = rpr0521rs.check_near_far(ps_val);
- if (near_far == RPR0521RS_NEAR_VAL) {
- Serial.println(F(" Near"));
- M5.lcd.print("Near!");
- } else {
- Serial.println(F(" Far"));
- M5.lcd.print("Far!");
- }
- }
- digitalWrite(TRIG, HIGH); // ���䳬����
- delayMicroseconds(10);
- digitalWrite(TRIG, LOW);
- times = pulseIn(ECHO, HIGH); // ���ճ�����
- distance = (int)(times * 0.017);
- Serial.println(distance); // ����ʾ������ʾ
- M5.Lcd.setCursor(10, 100);
- M5.Lcd.print(distance);
- if ( ((distance > 0) and (distance < 6)) or (near_far != RPR0521RS_NEAR_VAL) ) {
- Motor.speed(MOTOR1, 50);
- Motor.speed(MOTOR2, -50);
- delay(800);
- Motor.speed(MOTOR1, 50);
- Motor.speed(MOTOR2, 50);
- M5.Lcd.setCursor(10,150);
- M5.lcd.print("Danger!");
- delay(800);
- } else {
- Motor.speed(MOTOR1, 0);
- Motor.speed(MOTOR2, 0);
- }
- delay(300);
- }
�������������Բ���ң�س�����ǰ��һ����������ͬ��Wi-Fi����������M5Stack������ǰ�������ƶ����ݸ�ʱ��M5Stack�Ƿ������������Ӧ���ƶ�����ң�س��ӽ�ǽ�ڻ���Ҫ�������ϵ�������ʱ�����ϴ�һ��������ܿ���

4. �ܽ�
�ڱ�ϵ�������У�Ϊ��������ʹ��M5Stack�Զ���ʻң�س����������̡�
ʹ�ÿ��Դ������ֻ�����M5Stack��Ӧ�ó���Blynk��������������ͨ�������ֻ�����ң�س��Ĺ��ܡ����dzɹ���ʹ��ť��M5Stack������������������ʵ����ͨ�����ݸ˵Ŀ��ƶ�ǰ�������ƶ���
Blynk�и��ָ�����Widget�������Ը���M5Stack�Ĵ������������Ӹ��ͬ�Ĺ��ܣ����������Ȥ�����磬�������Կ�������������Ľӽ��̶��Լ���ʪ�ȴ�������������ֵ������ʾ������ʾ������
���������ԣ������Ĵ�������ʵ����л���Ķ���ϵ�����£�
��Դ��/techclass.rohm |
|