 �� 2020-11-11 02:58:10 ����
�� 2020-11-11 02:58:10 ���� 618
618 �ղ� 2
�ղ� 2���
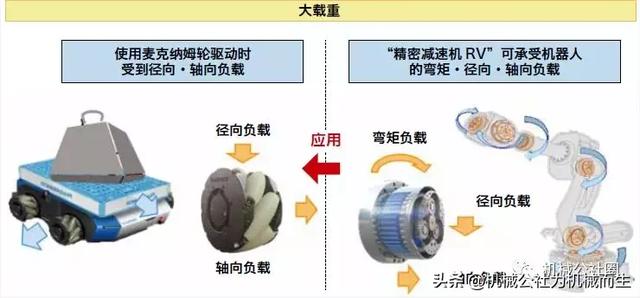
�����ܼ��ٻ�RV�����и߸���・�߾���・��Ť�ص��ص㣬�ڹ�ҵ�����˹ؽڣ��������Լ�����װ�䡢����װ�õ�������ܺ�����
���ʹ�á����ܼ��ٻ�RV����������������ۻ������・�����רҵ֪ʶ�����ǿ������˸߳��ص������ķ��챣�����ϼ��еġ����ܼ��ٻ�RV�����Ƴ�������²�Ʒ-AGV������ԪRVWϵ��(����ͷ)��
��Ӧ�õ���ҵ

����ص���;��
�����ꡢ���������Ͳ����Զ������������˻��ķ�չ����ҵ�����˺��ƶ�������AGV���ϱ��������˸���������˾��Ը���������ߴ����������С�ռ���͵����⣬����AGV���Ƴ��˿���������ȫ�����ƶ�����ִ�о�ȷ��λ�������ķ������Ԫ(RVWϵ��)��
ȫ�����Ƅ�AGV���ַ�ʽ�ıȽ�

��ȫ�����ƶ�AGV�ıȽϡ�
ȫ�����ƶ�AGV������ӵ��3�ַ�ʽ�������ķ�֣�ȫ���֣��Լ����֡�
���б���˾����ע�������ķ�ַ�ʽ�����������ַ�ʽӵ�������ķ���ת��������Ч������С���ڲ��ռ�����������ɶȵ��ص㡣
�����ķ�ֵĶ���

�������ķ�ֵĶ�����
���������ķ�ֵ�AGV���˶���������ͼ������
ͨ�����Կ���4���ֵ�ת���ת��ʹС����������������ǰ�������ߡ����С�б�ߡ���ת��ȫ�����ƶ���
RVWϵ�в�Ʒ�Ľ���

��RVW�IJ�Ʒ���
RVWϵ���Խ��ա������ء���װ��Ϊ��Ʒ���
����ͼ��RVWϵ�в�ȡ��������ü��ٻ��Ĺ��죬���ҹ�˾�������������ķ���������˸��ٰ�ġ����ܼ��ٻ�RV�����Լ����ӵ����AGV��������뷨����
RVWϵ�С�������1��

��RVW�����������ա�
�����Ź�ҵ�����˵Ļ��岻�ϡ����������������ܼ��ٻ�RV���ڽ��ջ�֮·ͨ�����Ͻ�����ӵ���������ṹ������ĸ�Ť������ܶȵĽ����������RVW���ǰѴ˽����ص����õ����£���������ü��ٻ���ʽʵ�ֳ���ƽ�Ĺ��죬ʹ��AGV��������������� ���Ӷ����AGV�����������ɶȡ�
RVWϵ�С�������2��
��RVW�������������ء�
�����ķ�ṹ��ʹ�û��ܵ�����������ء���Ϊ��ҵ�����˶����ġ����ܼ��ٻ�RV��ӵ���ų��ܵ���ظ���・������・�����صĻ�����
�ѡ����ܜp�ٙCRV���������ķ��챽��Ϊһ��Ĺ��죬ʹͬʱ�������Ծ��������ĸ��س�Ϊ���ܡ�
RVWϵ�С�������3��

��RVW����������װ��
��RVWϵ���Ǽ����������ķ���・�����ܼ��ٻ�RV��・����ӿڷ���(������뷨����AGV���尲װ������Ϊһ��) ・�ͻ�ʹ�õ����ƥ����������Ϊһ���һ�廯��Ʒ�����Դ������AGV����ƹ�ʱ����װ��ʱ��
RVWϵ�С�����Ʒ���ݡ�

���ء����ܼ��ٻ�RV���߳������������ķ��챵�AGV������ԪRVWϵ��(����ͷ)�����Խ�Ϊ�����������ķAGV(С��)��ʹ����С�Ŀռ��ڰ��������ø�Ϊ������Ч��
��������ͨ��ʹ�����ַ�ʽ���Ը��ƹ����е������ܹ���ʹ�ñ�����Ҫ��������������ʱ��İ�������ø�����Ч��
���ڱ���
�����ѹ�����Թ�ѹǰ�����ļ���Ҫ��
���ӹ�����+��ʽ�ӹ����� һ����ӱ����������
���ػ��������ǻ����ĸ�����Ӳ��ľ��ȱ�֤���ա���ע������
��ʽ(Ҳ���쳵ʽ)����5�����DIY
���żӹ����ļӹ�����(Ra<0.8)�IJ���Ӧ��

��е���硪��Ϊ��е����