AGV驱动方式
1 舵轮驱动
1.1 单舵轮驱动:前面的舵轮能够提供驱动能力,同时调整前进方向。后面2个万向轮为从动轮。该结构成本低,控制与汽车的阿克曼结构类似。

前面的舵轮能够提供驱动能力,同时调整前进方向。后面2个万向轮为从动轮。该结构成本低,控制与汽车的阿克曼结构类似。
1.2 前后两舵轮驱动
底盘结构为2个有驱动能力的舵轮+2个万向轮。该结构控制灵活,可以实现全方位移动和旋转。

1.3 立式舵轮
相对的减小舵轮的横向体积,行走转向灵活,行走轮组更能适应存在台阶,凸台等障碍的地形.

1.4 卧式舵轮

差速驱动:两轮差速的行走机构 这种行走机构两行走驱动车轮对称布置在前后中线上两支承轮前后分别布置在以两行走轮支点为底边的等腰三角形顶点处。小车靠两侧行走驱动轮差速转向因此不必设置舵轮。该小车机构简单、工作可靠、成本低。在自动运行状态下小车能做前进、后退行驶并能垂直转弯机动性好。和带舵轮的四轮行走机构小车相比该车由于省去了舵轮不仅可以省去两台驾驶马达还能节省空间小车可以做的更小些。近年来这种机构的小车得到广泛应用。 为了提高行驶时车体横向稳定性可将两轮差速的四轮行走机构做如下改进将支承轮由原来的两个增加到四个分别布置在小车底盘的四个角处。
2 差速驱动
差速驱动结构采用2个定向驱动轮和2~4个万向轮组成。控制简单,可以完成曲线、直线、旋转等运动。

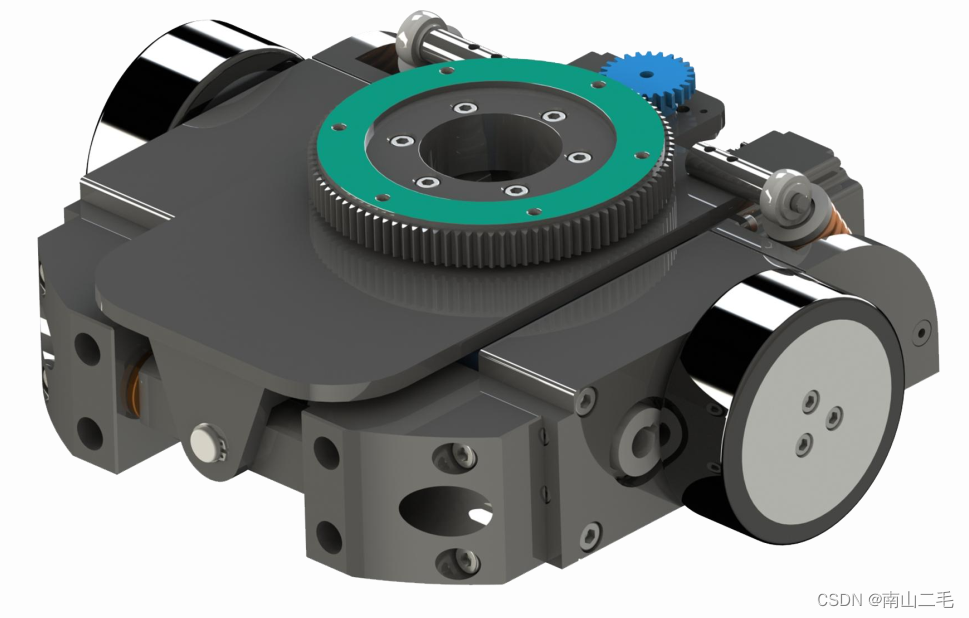
2.1 差速驱动总成
LWCD-CS-H170-48V-Q400 差速驱动总成采用伺服电机和行星减速机传动组合,反对称方式安装。这种方式可以在使轮对同轴,提供较大动力(通常电机外形尺寸和功率成一定比例)的情况下,大大缩短轮距,节约空间,以使机器人体积小型化。由于采用这种安装方式,电机的选择就可比较广泛,齿轮变速箱的作用可以提升扭矩,减小转速,也可以利用之间的摩擦自锁在需要停止时起到刹车作用,同时延长轴距以满足轮对安装需要。防护等级IP65,额定电压48V,牵引重量达400~1400Kg。
2.2 立式双轮差分

3、全方位驱动:其它形式的行走机构 近年来国外公司不断研究出新的行走机构。其中最有代表性的属瑞典麦卡纳姆公司的行走机构。该行走机构设计新颖、机构紧凑四个驱动车轮以铰接形式分别布置在底盘的四个角上。运行时分别控制四个车轮的转向和转速利用速度矢量合成原理实现驾驶。后来日本三井公司与麦卡纳姆公司合作在原基础上做了改进推出了三井麦卡纳姆车轮系统,其性能比原来又有所提高。这种AGV小车可实现全方位行驶。
三轮车型:三轮行走机构 三轮行走机构的AGV小车三个车轮分别布置在等腰三角形的三个顶点上前轮既是舵轮又是行走驱动轮后面两个车轮是无动力支承轮。三轮行走机构的AGV小车结构简单、控制容易、工作可靠、造价低。该车手动时可前进、后退和转弯自动运行时只能单向行驶转弯时后轮中点轨迹偏离导引线轮迹呈曳物线。
四轮车型:带舵轮的四轮行走机构 带舵轮的四轮行走机构是在三轮行走机构基础上演变过来的,它相当于把两个三轮车合并在一起两支承轮对称地布置在小车前后的中线上前后车轮分别对称布置在以两支承轮支点为底边的等腰三角形顶点处。前后车轮既是舵轮又是行走驱动轮。这种AGV小车在自动运行状态下可全方位行驶转弯时前后车轮均能跟踪导引线轨迹机动性比三轮车好适用于狭窄通道作业环境。