��ú��������չ����(��)�����Զ�������
������1,2
http://www.zgmt.com.cn/magazine/magazineContent.do?catalogdataid=945a779540834462a7c2436122836dac
(1. �й���ҵ��ѧ(����)��������Ϣ����ѧԺ�������к�������100083��2.�й���ҵ��ѧ(����)�ǻۿ�ɽ��������о�Ժ�������к�������100083)
ժ Ҫ ��ú���Զ����ǻ�е����ú�������������˻�������Ĺؼ�����֧�ţ��ǽ�60���ú��������չ���ص����硣����IJ�ú�Զ����о���Դ��20����30�����20����60����������ӻԾ�з��Σ�Ӣ���������ڲ�ú��ң�ؼ���������������ٿ��Ƽ����������Զ����Ƽ�����Զ�̼�ؼ���������ظ����Һѹ֧�ܵ�Һ���Ƽ�����ȡ���������ԵĴ���ͻ�ơ�����21�����������ҹ���ú���Զ����Ƽ�����������ѧϰ�ٵ��������£��߳���һ������ϡ����¼��ٵķ�չ֮·����10�������ҹ���ú������ϵͳ�ѽӽ������Ƚ�����ˮƽ���з�����Խ����ظ�ķ��νظ����Զ�̼�ؼ�������Ϊ��ʻ��ϵͳ�����Զ�����ú������Һѹ֧�ܵ�Һ���Ƽ��������������㷺�ƹ�Ӧ�á���ЩΧ�Ʋ�ú�����Զ����Ƽ������������������ҹ�ú�������Զ���ˮƽ����ǿ���ҹ�ú��ȫ��Ч����������
�ؼ��� ��ú������ �Զ������� �Զ����� �Զ��ظ� �˹����� Զ�̼��
��ú��Ϊʵ�ֲ�ú��е�����Զ����춨�˲��ɻ�ȱ�Ļ���������Ӧ�ü����˿������Ͷ��������ú̿����Ч�ʣ����Ų�ú����ʵ���Զ���������ǿ�˶Ը��ӻ��������ĵ����ͺ���Ӧ�ԡ���ú���Զ������ڸ��Ӷ��ӵĿ��ɻ������Զ��������в�����ʹ֮�ܹ���Ӧ���ӻ������ﵽ��������״̬���������й��ϣ�����߾����Ǵﵽȫ�������Զ��������˻���ú��ҵ������ú�����Ƽ������Ͻ������ƶ���3�β�ú����������19����ĩ�ڵ����ĸ�ú��ʵ���˻�е���߲�ú���ǵ�1�β�ú����������20����50����������˲�ú�����䡢֧����ȫ��е����ú(�ҹ���Ϊ���ۺϻ�е����ú��)���ǵ�2�β�ú����������20����70������ڳ�����ȫ��е����ú�����Զ����ƣ��ǵ�3�β�ú����������Ŀǰ����ú��Ⱥ�������ܻ����˻�����չ���ǵ�4�β�ú����������
�Զ�������Դ�Դ�ҵ������Ч����������������1783�꣬�����˰�����������˹(Oliver Evans)���ڷѳ���۳������Զ������̣������ʹ����������ͻ�����ʽ����������һ�������������̣�1788�꣬Ӣ����ղķ˹������(James Watt)��������ĵ�������ʵ��������ת���Զ����ڣ��������Զ�����װ�õ��о���Ӧ�ã�1921�꣬A. O. ʷ��˹����������һ�����������Զ��������ߣ�ʹ���������½�95%��1953�֥꣬�Ӹ��ѧ��������˹��(David G Osborn)���ڰ��Զ�������Ϊ���ϰ��˵��Զ�����������������Ϣ���ã���������(�Ͷ�)���Զ�����[1]��
���湤���Զ���������չ����ú�Զ�������Ҳ��ʼ�з���Ӧ�á�20����30������ڣ����������о���ú���Զ����ٿ��Ƽ�������ʱ�����������ȵ�λ��1939�꣬������ѧԺA M �ܶ�Ƥ����άԺʿ�����ú���Զ�������ԭ�����ݵ綯���غɱ仯���������ת�٣��Դﵽ�ظ�ص����ƽ��״̬��1954�꣬������ѧԺͨѶԺʿB A ����������Ʒ��ѡ����ú̿��ҵ�Ϳ�ɽ��ҵ��Ϊ�����Զ���ʵ����Ŀ�����Զ����������������̵��Ż����У�������ֻ����������й��ϣ������о���3����ѧ���⣺һ�Ƿ�չ�Զ��������ۣ������о��Զ���е��Զ��������·������¼����������о������Զ�����������[2]��
��20����50������ڣ�Ӣ�����¹������˲�ú����Һѹ֧�ܡ��ΰ����ͻ���ɵ��ۺϻ�е����ú�����棬ʵ���˸�ú��װú����ú��֧���ȹ����������ҵ���Դˣ���ú���Զ������Ƽ���������߲�Σ�������½���з�����ú���ĺ㹦���Զ����ټ���������ң�ؼ������Զ��������������Զ����Ƽ�����Զ�̼��ؼ�����1956�꣬�ҹ����йش��齨���Զ�����Զ��������о��������ҹ��IJ�ú���Զ����Ƽ����о�����20����70��������������ú���Զ���������չ������ͼ 1��ʾ���ڳ����Զ����Σ���Ҫ�з��˿��Ʋ�ú�������ٶȵĺ㹦�ʿ���ϵͳ�����м��Զ����Σ������˲�ú���ظ�ú����Զ���������ͬʱ�����Һѹ֧���Զ������ƼܵIJ�ú���Զ��ظ����֧���豸Զ�̿��Ʒ�չ���ڸ��Զ����Σ��γ��˲�ú����Һѹ֧�ܡ����ͻ��ȶ���Զ�Э������ģʽ��

ͼ1 ��ú���Զ���������չ����
1 ��ú���㹦�ʵ��ټ���
�㹦�ʵ��ٿ����Ǹ��ݽظ���Զ�����ǣ���ٶȣ�ʹ�ظ�綯�����������ƽ��ֵ�ӽ��ڶ���ʣ���ʵ�ֲ�ú����������ӣ���һ�����ط����ıջ�����ϵͳ��
1.1 �����ú���㹦�ʵ��ټ�����չ
20����30������ڣ������Ϳ�ʼ�о���ú���Զ�������ʱһֱ�����������ȵ�λ����ʿ�[3]����1955���������д�������������������й��Զ��������ĺ���Ʒ(�ɹ�)��50��ƪ�����������������ⷽ�����Ʒȴһ��û�С���
1939�꣬ǰ������ѧԺA M �ܶ�Ƥ����άԺʿ�����˲�ú���Զ���ԭ��Ӧ���ݵ綯���غɱ仯���ڽظ�״̬��������Ļ��������ǹ̶��ظ��ٶȡ�����ǣ���ٶȣ�ʵ�ֺ㹦�����У���ѷ�����ͬʱ���ڽظ��ǣ���ٶȣ����ֺ㹦������[4]��
20����50������ڣ������ڿ�����ѧԺ���Ƴ���ú���Զ����ɵ���������ͼ2��ʾ���������ص�����ظ�ɵ����仯����ͨ��ת��ƫת����Һѹ��о���ƣ���ͨ�������ֱ�ת������������������ָ����ֵ���Զ����ɵ�����Ӧ���ڶٰ�˹�Ϳ������ú�����Զ����ƵIJ�ú��ǣ���ٶȿɴﵽ0.51 m/min�����˹����Ƶ�ǣ���ٶ�(0.31 m/min)�����65%[3]��1970�꣬����������1��-101��Һѹǣ����ú������PAH���ɵ��������ɸ��ݲ�ú�����ɴ�С��ͨ����Һ�Զ�����װ���Զ����ڲ�ú����ǣ���ٶȣ�ʵ�ֲ�ú���㹦�ʽظ�[5]��

1-���ص綯����2-������������3-���ɣ�4-ת�����ڷ���5-�ף�6-ת�7-����������8-��Ƕ�������9-���ݸˣ�10-�����ֱ�
ͼ2 �ٰ�˹��ú���Զ����ɵ�����ԭ��
1964�꣬�ձ���˾�о���Բ�̽�ú�������ٶȵ�Һѹ�Զ����ڼ�������ͼ3��ʾ��ͨ����ѹ���ƣ�ʹ��ú���Զ����ڵ����˵Ľظ��ٶȺ�װ���ٶȡ��ڵ���ϵͳ�У�����1̨������ѹ�����Ľ������������ͱ�ͨ��������ظ�תͲ��������ѹ�����������ظ�תͲ��ת������ú����ǣ����˿�������仯����ѹҲ��֮�仯���ɴ����Զ����ƽ�ú���Ľ����ٶȡ�

ͼ3 �ձ��з��Ľ�ú���Զ�����ϵͳ
1976�꣬�¹����·�˾�Ƴ�EDW150-2L�͵�ǣ����ú����ǣ���ٶ��Զ���������ͼ4��ʾ��ǣ���ٶ��ܿ��ڽظ�ʣ����ظ����������ҳ��������ʱ��ǣ���ٶ��Զ��½�������ʡ������ú��Ͳ����ס��ǣ�����������ͣת���Զ���ת����ú�����˳���������������½��������⣬��ú�����е���������¶ȱ������ܷ���Ԥ��������ͣ����������ʾ�������ͼ���λ[6]��

A-��������B-����װ�ã�C-���ʵ�������D-�ظ�����E-��ʾ����F-���ٷ������H-��ת������J-������������K-����ָ�L-����ָ�N-�ٶȵ�������P-����װ�ã�M-ǣ�����
ͼ4 EDW150-2L�͵�ǣ����ú���Զ�����ϵͳ
1.2 ���ڲ�ú���㹦�ʵ��ټ�����չ
1975�꣬����������ú����������MLS3-170�Ͳ�ú�������Զ�����ϵͳ����ͼ 5��ʾ����ǣ���������仯��ϵͳ����·����ѹ�������ֵʱ����ѹ�;������η�������������ܣ��ƶ������Ļ���ѹ������ʹ����������ƶ�Ш�ο����λ�ơ�Ш�ο��λ����ͨ�����ˡ��ŷ������ŷ������ı��ͱõİڽǣ�ʹ�õ���������ı䣬�Ӷ��ı���Һѹ�����ת�ٺ�����ת�٣�ʵ�ֲ�ú����ǣ�����صı仯�Զ���������[7]��1985�꣬�ó�������MG300-W˫��Ͳ��ú������Һѹ�Զ����ٹ��ܣ�����ǣ������С��ʵ���Զ����١�
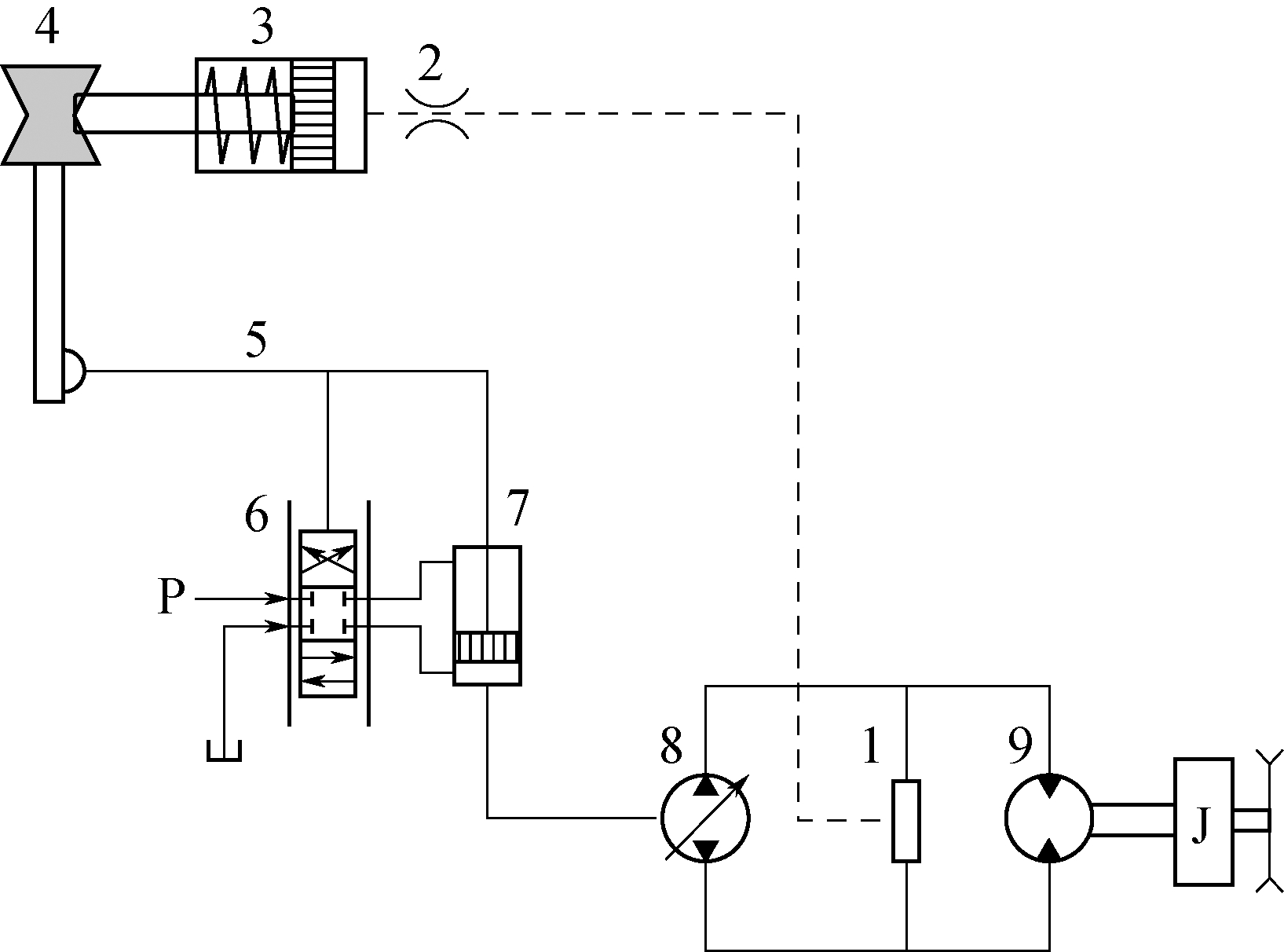
1-���η���2-��������ܣ�3-�����ף�4-Ш�ο飻5-���ˣ�6-�ŷ�����7-�ŷ��ף�8-�ͱã�9-Һѹ����
ͼ5 MLS3-170��ú���㹦�ʵ���ԭ��
1991�꣬ú̿��ѧ�о���Ժ�Ϻ���Ժ�벨������������MG344-PWD�͵�ǣ����ú��ǣ����������PWM��Ƶ���ټ�����ʵ���˺�ѹƵ��(v/f)�Զ����ƣ����ڵ��ڻ�Ƶ50 Hzʱ�Ǻ�ת�ؿ��ƣ��ڸ��ڻ�Ƶʱ�Ǻ㹦�ʿ��ƣ�����й��ء���������ѹ��Ƿѹ�����ȡ�©������ȱ�������,��ǣ������ͱ�Ƶװ�ý�����Ч����[8]��
1995�꣬����ú���е�����Ƶ�MXB-380E/3.5��ֱ����ǣ����ú�������к㶨���ʡ�������ϼ����ر������ܡ�2007�꣬�ó�������MG500/1130�Ͳ�ú������ϵͳ����FX2Nϵ�пɱ�̿����������� ABB ��˾�� ACS800 �����ޱ�Ƶ������������ʱ����150%�ת�ء���Ƶ�����ٶȸ�����ǣ�����Ӽ��ټ���ú���Ķ���ִ�еȾ�ͨ��PLC�����ơ�
2 ��ú������ң�ز�������
2.1 �����ú������ң�ؼ�����չ
1963�꣬������ʼ�о���ú��ǣ���ٶȵ��Զ����ڼ�����½���Ƴ�3��ǣ���ٶ��Զ�����ϵͳ��1965�����ң��������Ƴ�Radian�Ͳ�ú�����ߵ�ң��װ��[9]��������9S�Ͳ�ú�����ߵ�ң��װ�ò��ó���Ƶͨ�ż������ھ���ң�ؾ���Ϊ15 m������ң�ز��ݲ�ú����8��������1972�꣬����������200̨��ú����װ��9Sң��װ��[10]��
1964�꣬�¹����·�˾���Ƴ���̨��Ͳ��ú�����ߵ����װ�ã������������Ҳ�����ȫ���Ա�֤����������һ�ֱ��ʰ�ȫ�����ߵ����װ�ã��������10 MW��Ƶ��434 MHz���������ֿ�װ�ã�1977�꣬���·�˾�з�EW-300-L����Ͳ��ú���������ߵ�ң�غ����ֿط�ʽ��2007�꣬���·�˾������SL1000��ú������2���������ֳ�ʽң�������������ܰ�������/����ǣ����ǣͣ������ҡ����/����������/�������е綯��ֹͣ����ϼ�ʹ����չ���ܡ����ݷ������첽�����и�ʽ��ʹ����ϵͳ��ʵʱ���ң������״̬��
20����70������ڣ��¹������ӵ�����˾�����FSG2500�Ͳ�ú������Զ����ң��װ�ã�����EDW-300L�Ͳ�ú����Ƶ��Ϊ150 MHz������ң�ؾ���Ϊ15 m�����ܷ������ֿ���ָ���⣬������ʾ��ú���������ܼ�����״̬�������м��书�ܣ�1984�꣬�����ӹ�˾�з���8SD63�Ͳ�ú������ң��װ�ã����ڰ��·�˾��ú�����ɱ�Яʽ���ߵ緢���8SD6300�Ͳ��ʽ���ջ�8SD6310����ɣ�����10������ָ��ز�Ƶ��441.4��442.95 MHz����ָ����Ƶ��Ϊ50 kHz[11]��ͬ�ڣ��ձ������������������Ƴ�MCLE200-DR8095��Ӧʽ�˾��������ú��[12]��
1976�꣬���������Ĺ���ú���е���Ժ���Ƴ������ߵ���Ƶħ���-67-P�Ͳ�ú����ң�ؾ���Ϊ20 m���Զ���������Ϊ�����ܣ��źŴ���ϵͳ�в�����˫Ƶ�룬����װ�������������[13]��
20����70������ڣ�����ú̿�о�����(INERIS)���Ƴ�Telsafe-V���ߵ��������ϵͳ��������Զ������ƺͼ��ӹ��ܣ��Լ�����ͣ���ͳ���ͣ�����˹����ƹ��ܣ����ڷ�������ú��ļ���б�㿪�ɵ�Զ������������[14]��1979�꣬����ú̿�о������з�����һ�����ߵ�ң��װ��Telesafe-DV���ܹ�ʹ��ú��˾������˾���������Ϻõİ�ȫ�ش�ң�ز�ú����ͬʱ�����Ƴ�һ��Զ����ң��ң��װ��Telesafe-CA������ʵ���ò�ú���������´����˫����ϢͨѶ����Ϊ��ʱ��ز�ú�������빤�ߡ�1982�꣬Telesafe-DV����������ú�ﻺ��б������Sirus�Ͳ�ú����Ӧ�ã�֮����ʮ��̨�����ͺŵIJ�ú��Ҳ½��װ��������ң��װ��[15]��
20����80������ڣ����湫˾������12CM27�����ɻ���װ������ң���������е�����Һѹ���ܶ�����ң���������ơ�2011�꣬���湫˾����������7LS8��ú�����䱸��HHXң��������˫����Ʋ�ú������������ʾ�����������Ϣ��
2.2 ���ڲ�ú������ң�ؼ�����չ
1971�꣬�ӱ�����ú̿��ѧ�о������Ĵ���ҵѧԺ��������������������˲�ú�����߸�Ӧң��װ�ã�����ͷ�������Ŷ��۵�MLQ-80�Ϳɵ��ߵ���Ͳ��ú�����������飬������֧�ܺ����Ϲ�һ��127 V���ϵ���ߣ���Ϊ�����źŵĸ�Ӧ�ߣ�������51�θ�Ӧң�����飬����39�ε�ң�ؾ���>2 m(ռ76.4%)����Զ���߾���ﵽ9 m[16]��1972�꣬�������Ƴ���ú�����ߵ����װ�ã��ڵ���ͺӱ����м��ŷ���ׯú��1292�����������������飬ң�ؾ���Լ40 m[17]��1973�꣬�������Ƶ����ߵ��������Ʋ�ú��װ����ɽ����Ȫ������Ŀ��µ�MLS2-150˫��Ͳ��ú�����������飬�ڹ���������Ŀ��ƾ���Ϊ35 m���ڻ�������ʱ�Ŀ��ƾ���Ϊ25 m��
1978�꣬ú̿��ѧ�о�Ժ�Ϻ�ú���е�о������з�MD-150�Ͳ�ú��ʱ��ͬ���з���F(S)YK-1�����ߵ�ң���豸��MDZ-2�Ͷ����ز������豸������ң�ؾ���Ϊ15 m�������ز��豸��Ч������ƾ���300 m�����豸�ڴ���ú���½����˲�ú��������ң�ز���[18]��1988�꣬��Ϊú̿��ѧ�о�Ժ�Ϻ���Ժ��Ҫ��ɲ��ֺ����з���FYK�ͺ�X801��2�ֲ�ú��ң��ϵͳ��FYK��ң��ϵͳ����ʱ�������������Ƶ�ƣ�X801��ң��ϵͳ����DTMF(˫����Ƶ�ź�)��Ƶ�ơ�1993��3�£���2�����ߵ�ң��ϵͳ��MG200-QW�ʹ���Dz�ú������������ֺ���ú������˹�ҵ�����飬���Ʋ�ú����Ͳ����������ǣ������ǣ����ͣ��ú����ͣ���ͻ���������ң�ؾ��벻С��15 m������֤��X801��ң��ϵͳ��FYK��ң��ϵͳ��㡢�ɿ�����Ӧ�ٶȿ�[19]��
2008�꣬ɽ��̫ԭ���ͻ�е����ú������˾(���¼�ơ�̫��ú����˾��)Ϊ�����Ƶ�MG400/930-WD��ú��������FYF50C˫��ң������ң����������1��Һ����ʾ����������ʾң�����İ���״̬�Ͳ�ú�������ݣ� ��·��Ʋ���˫CPU��ƣ�һ��CPU�������̺������շ�����һ��CPU������ʾ���档
2010��������Ƕ��ʽ������EDA����ʹ��ú������ң��װ������������ͨ�����̾����ͼ�ε���Һ����ʾģ�飬����ʵ�ֲ�ú���������ƹ��ܣ����ܶԲ�ú������״̬�ؼ���������ֱ����ʾ������ʵʱ���[20]��
2014�꣬�й���ҵ��ѧ(����)���������ֻ������Ͳ�ú��ң�������ںӱ�������Դ��˾���Ƶ�MG-561�ͱ�ú���ŵ��ٲ�ú����Ӧ�á�Ŀǰ���ҹ���ú��ң������Ҫ��FYFϵ�в�Ʒ�����ڶ����ͺŲ�ú����
3 �����Զ����Ƽ���
3.1 �����ú���Զ����Ƽ�����չ
1963�꣬Ӣ���ȸ�����(Bevercotes)��˾�з��������Զ�������ij��ڿ����豸[21]��1974�꣬Ӣ��ú̿������˹������Զ����з������ü�������Ʋ�ú���Ĵ�ֱ���ɷ�Χ(����)���������ƽ�(����)���ع������н�(����)��1980��1�£��з��ɹ�������ϵͳ��Ӣ���ܸ�����ɵ�(BJD)��˾����ĵ���Ͳ��ú�������˾������飬�䲼����ͼ6��ʾ��������ϵͳ���ܺʹ��������������ݡ�ִ�п��Ƴ���ָʾ���ϡ��빤���������豸����潻����Ϣ����������һ̨�������س�Ӧ�����ݲ����нظ�״̬������ִ��ϵͳ����Ŀ��ƹ���[22]��
ͼ6 Ӣ��BJD��ú��������ϵͳ
1976�꣬Ӣ��ú̿�����о���������ɭ��˾���������µ����DZ���˾�������Ƴɹ���ú��������ʾ���Զ�����ϵͳ(Mining Instruction Data and Automation System��MIDAS)����Ҫ������������ʾ���Զ����ƣ����Զ�����װ�������˹�����װ�ã����ڶԲ�ú�������������趨���������µ��ֶ�����[23]��1982�꣬�ܸ�����ɵ�(BJD)��˾Ϊ�������Ƶ�ACE��ú���䱸��������ϵͳ���ɶԵ�����ء�ǣ���ٶȡ�ҡ�۸߶Ƚ��г�����ƣ����й�����Ϻ��¹���ʾ���ܡ�1983�꣬Ӣ��ú̿���������Ƴ����ü��ɵ�·��MIDASϵͳ���洢���ﵽ64 KB��1985�꣬Ӣ�����������ڵ�ú����514����������������MIDASϵͳ���Ƶİ���ɭAB16����Ͳ��ú����ú�㳤��224 m�����1.9 m�������˵��ܲ���3.8��t�ļ�¼[23]��
1980�꣬�¹����·�˾��ʼ���������ƵIJ�ú����1985�������ƵĹ�Ͳ��ú����ʽͶ����1989�꣬�¹���˹�ط�����(GEW)��˾���������������Զ�����ú�����棬����˫��ͷ�Զ���ú�����Ⱥ��������͵¹�ú��Ͷ��ʹ�á�1991�꣬���·�˾���Ƴ����������Ƶ�EDW-230��-2L-2W��ǣ��˫��Ͳ��ú������Īŵ��������������飬��Ҫ�Ŀ��ơ����Ӻ͵��ڹ��̾������������ƣ�����86����������24������Ԫ����������Ϣ���ܴ��䵽���ϣ���ͼ7��ʾ[24]��

ͼ7 �¹�EDW-230���ú����������ϵͳ
1980�꣬���������Զ������Ժ����ϣ�����շ�Ժ���Ƴ���������-2���Զ���Զ�̿���ϵͳ�����ڹ���С��160 kW��Һѹǣ��dz�����ú������֤��ú��2�����й�����һ��ͨ���ı�ǣ���ٶ����ȶ��綯���غɵĹ���������ͨ���������綯���غ����ȶ�ǣ���ٶȵĹ���������ʹ�ñ�������ϵͳ�����ǣ���ٶȽ�25%�����ܺĽ��ͽ�40%�����ҿ��Խ��ͷ۳�����߿�ú�ʣ���߲�ú���ɿ���[13]��
1993�꣬�����ʰ���(Long-Airdox)��˾��ELϵ�в�ú��������Impact���ɱ��������ϵͳ�����и��ɿ��ơ�ȫ��Ļ�����ء���ú���Զ���λ���Զ����ߡ�������ơ����ܻ���ȫ���������������ϡ����ݴ���ȹ��ܡ�
1993�꣬�������湫˾�з���JNA(JOY Network Architecture)����ϵͳ���Ǿ����ú���ĵ�1������ϵͳ�����м����������Ƶ�ŷ���Һѹϵͳ���ع��ܣ�ͨ�����Ʊ�Ƶ������ǣ���ٶȣ���ͨ�����ֲ�ͬ��RTDװ�ú͵�����������������е��������״����2005�꣬���湫˾�Ƴ�������ܼ�FaceBoss1.0ϵͳ���Ǿ����ú���ĵ�2������ϵͳ�������Ƽ����CCU���е���ú�����ݵIJɼ��������ͳ�����Ƶȹ�������������JDC(��ʾ�����)��RIO(Զ���������ģ��)��GIO(ͨ�����������ģ��)��DIOM(�����������ģ��)��ǣ����Ƶ��������JOS(�������ϵͳ)�����ز�ͨѶ[25]��2011�꣬���湫˾��7LS8�Ͳ�ú����������˾ʹ�ã��û�����FaceBoss1.0���ϵͳ��2017�꣬���湫˾�Ƴ�FaceBoss 2.0����ϵͳ���Ǿ����ú����3������ϵͳ��ʵ���˸߶ȵ��������ϣ���ǿ�����ݹ�����������ϵͳ�ṩ��������(Joy Smart)���ܡ���ʷ���ݴ����������ٲ��������������˹���������������ų�������������ú���߹������ų����ϣ�֧�ָ߽��Զ��������������ܽ���˫�����ߵ�ͨѶ��
2001�꣬�¹��ɿ�����˾(DBT)�Ƴ���ú����COMPACT������ϵͳ������EL3000�Ͳ�ú������ϵͳ������70%����·���൱��������������ܸ��ӿɿ�����ϵͳ�ڰĴ������ϲ�����ú��ɹ�ʹ�ã��ڶ���������ʵ���˲�ú�����Զ����������������ִ���ú���Զ����Ƽ���[26]��
2001�꣬�Ĵ����������ѧ�빤ҵ�о���֯(CSIRO)��ʼ�з��۲��Զ�����Ŀ��2005���з�����ú����ά��ȷ��λ���������ֱ������ˮƽ���Ƶȼ������γɹ������Զ���LASCϵͳ���ڰĴ����DZ�������(Beltana)ú���״����óɹ���
2011�꣬���·�˾���Ƴ�SL1000�ʹ�ɸ߲�ú��������ϵͳ��IPCΪ�������ģ��γ����绯���˽ṹ����ͼ 8��ʾ����ʾ��������ֲ�ʽCAN����ģ�顢MCTģ�顢��Ƶ����ң�ؽ�������IPC��������֮����ֱ��������·���������ݱ��뾭�����Ŀ��Ƶ�Ԫ���з��������������˼�ؼ��Զ����ظ����ݣ�ʹ��ú���ܻ������˼�ʵ������

ͼ8 ���·�SL1000��ú���ĵ��ϵͳ�ܹ�
3.2 ���ڲ�ú���Զ����Ƽ�����չ
1988�꣬������������ú���е�о����ͼ���ú���������з��˲�ú��ǣ����������ϵͳ������TP801��������������ϵͳ��A/D��D/Aת��������MS0801�ӿڵ�·�壬��������˷������ʽ������ʾ����
2004�꣬��ؿƼ��ɷ�����˾�Ϻ��ֹ�˾(���¼�ơ���ؿƼ��Ϻ��ֹ�˾��)�з��˻���DSP��CAN���ߵķֲ�ʽ���Ƶĵ�1����ú��DSP���ϵͳ�����ɶ�����ܹ���ģ�顢�����߿���ͨ���������м��ϵͳ���˻���ʾ�����ӿڵȹ��ɣ��Ǿ���һ���ݴ������ķֲ�ʽ����ϵͳ����1̨DSPϵͳ��װ�� MG750/1815-WD��ú���ϣ�2006��1���ڴ�ͬ������о��¹�ҵ������[27]��2009�꣬�ù�˾�з���2����ú��DSP���ϵͳ������600��̨��ú�������У�2015�꣬�ù�˾�ڶ���DSP���ϵͳǶ��LASC��λ��������ͼ9��ʾ��������úҵת����ú��IJ�ú���ϰ�װ���У���ʵʱ����ú����ά��̬���Զ���ֱ�ΰ����ͻ��Լ���300 m����������С��10 cm�Ķ�λ����[28]��2019��7�£��ù�˾�Ƴ�MG1100/3050-WD�Ͳ�ú�������ø߶ȼ��ɵ�DSP+ARM����ϵͳ���Ƚ��ɿ���RTOSʵʱ����ϵͳ������ȫ��Ĺ�����⡢������ϺͰ�ȫ�������ܣ������ۺϼ���ϵͳ(�������ؽظ���Ƶ�����ײ��״����Ԥ����ҡ�����������ӡ���Ƶ����)��֧�ֱ�����Զ��(�ƶ�)��ء�����ָ����ơ���Ĥʶ����������WIFI��4G����������롣

ͼ9 ��ؿƼ��Ϻ��ֹ�˾�����ܲ�ú��DSP����ϵͳ
2008�꣬������Դú��������MG500/1220-WD��ǣ����ú���ϲ�����ר�ſ����Ĺ��ػ���������ϵͳ���е��˲�ú�����в�����⡢���㡢���ơ���ʾ�ȹ��ܣ���ϵͳ��Ҫ���л�MIC3001/8������ADAM���߶��Ӱ塢�̵�������塢PT100���ģ�顢D/A���ģ�顢A/D����ģ�顢RS485/RS232ͨ��ת��ģ�顢Һ����ʾ���ȹ���[29]��
2008�̫꣬��ú����˾��MG400/930-WD��ú��Ϊ���壬�Ƴ���ú�����ܻ�����ϵͳ�����д�������������ܷ������ơ���������Զ�����⡢������Ϸ������ܡ�ȫ���նμ���ظ���Ƶ��Ĵ��ܡ�2019��11�£��ù�˾���Ƶ�MG750/1960-WD���ܻ���ǣ����ú�������ʮ�˽��й�����ú̿�����������豸չ���ᣬ�û��״�32λDSP+FPGA��������ķֲ�ʽ����ϵͳ�������˲����ظ�ú����ʹ����GIS����ƽ̨��ʵ���˽ظ�켣�Ĺ滮�͵��������⣬�û����ó��Ӿ��״����Ϳ�㼼�����ǹ⼶Ƕ��ʽ����Ƶ�ͱ�����������ϵͳ����ȫ����ʵʱ�����豸����״̬������4G / 5GͨѶ������������ú�����������ƶ�Զ����άƽ̨��ʵ���˲�ú���ĸߴ�������̬����ʵʱ�����ƶ��ն˷��ʣ��Լ��豸�����ܹ�����ϡ����ݷ�������߹�����
2018�꣬���ճ��������Ƽ���˾�Ƴ���ú�����ϵͳ�����л�������ӦԤ���㷨���Զ�����úģʽ��ͨ������ú��������ݼ��������ݣ����������涥�װ弰ú�����άģ�ͣ����ز�ú���Զ�����ú��
4 ��ú����Զ�̼��ؼ���
4.1 Һѹ֧���Զ����Ƽ�����չ
Һѹ֧���Զ������Dz�ú�������Զ����Ļ���������������ʵ���Զ����ƣ������Զ�����ǰ̽���ͻ����width=17,height=11,dpi=110�Զ����ƴ�ʽ���ͻ�width=17,height=11,dpi=110�Զ�����width=17,height=11,dpi=110�Զ��Ƽ�width=17,height=11,dpi=110�Զ�֧�ŵ�ѭ�����ƶ�����һ����Ҫ����10��12��������
4.1.1 ����Һѹ֧�ܵ�Һ���Ƽ�����չ
1961�꣬Ӣ��ú̿��������ϯ�͵�.³��˹���������Һѹ֧���Զ����ơ�ʵ�ֳ��ڹ�����Զ�̲��ݵ��з��ƻ�(Remote Operation Longwall Face��ROLF)��Ӣ������(Dowty)��˾��٤���ˡ�����ѷ(Gullick Dobson)��˾��ʼ��֧�ܳ�������о�,�з������ֵ�Һ����ϵͳ��ȫҺѹ����ϵͳ��������δͻ�Ʋ�ú���Զ����ߡ��Զ���ֱ���Ƽ���,��Щ��Һ����ϵͳ��δ�㷺Ӧ��[22]��
1974�꣬Ӣ��ú̿����������Ƚ���ú����������(Advance Technology Mining�� ATM)��������������Ƚ��IJ�ú�����������Һѹ֧�ܣ��������Ч�ʺͰ�ȫ�ԡ��Դˣ�Һѹ֧�����ú������������Զ����Ƽ�����ʼͬ���з���ϵͳ���������Һѹ֧�ܵ�Һ���Ƽ���ͻ���Է�չ��
1976��֮�����¡�Ӣ����Һѹ֧�ܵ�Һ������Ƽ������ٷ�չ����Ҫ����������5�ҹ�˾(������������ĸ���ء��������ء���ɭ����˹�ط�����)��Ӣ��2�ҹ�˾(���ݡ�����ѷ��٤����)[30]�����ǣ���Һ����Һѹ֧���������ڰĴ����Ǻ�������ú���ƹ�Ӧ�õģ���Ӣ���͵¹�ú��ʹ�ò��ࡣ��20����90���ĩ, ȫ�����Լ��150��װ���˵�Һ����Һѹ֧�ܵIJ�ú�����棬Լ66%���������ͰĴ�����ú��1996�������ú���Һ����֧�ܹ���������ռ��93%[31]��
1977�꣬����M M �Ѵ�����ɽ��е�빤�̿����о����з�����������-�������ϲ�ú��Զ�����Զ�����ϵͳ��������ú������˹ͻ��Σ�յĹ����档��ϵͳ���в�ú���ͽʳ�����Զ�̿��ơ�����ϵͳԶ�̿��ơ���ú������װ���غ��Զ����ڡ��ظ��������ڶ�����ú��߽���Զ����ڡ���Ҫ���������Լ���ú������·�̡��˶�����������غɵļ�⣬��ϵͳ��ʹ��ú��ƽ��ǣ���ٶ����15%��20%[13]��
1981�꣬Ӣ�����ݹ�˾���Ƶĵ�Һ�������װ��Һѹ֧���״��ڰĴ����ǿ�������ú���״�ʹ�ã��ÿ�������74�ܵ���Һѹ֧�ܣ�ƽ��ú̿������7000 t/d��1984�꣬���������������ݵ������Jú��װ���˵�1����Һ����Һѹ֧�ܵĸ߲���Ч�����棬���õ��ݹ�˾������ťʽ����������װ�á�1985�꣬���ݹ�˾���Ƴ���2��ȫ�����漯�е�Һ����ϵͳ����ϵͳ��������̨����Դ�������ڹ�������������,��ʵ��ȫ�����漯�п���[32]��
1983�꣬٤���ˡ�����ѷ��˾���Ƴ�ELECTROFLEX��Һ����ϵͳ���ں�ķ����ú��(HemHeath)Ͷ���������У���װ��������������Ϊ����,�ɿ���Һѹ֧�ܵ�25��������ÿ̨֧�ܶ�װ������������װ��,������������������̨�����ӡ�
1984�꣬��˹�ط����ǹ�˾�������ӹ�˾�������Ƴ��¹���1��֧�ܵ��ӿ���װ�á���Panermatic-Eϵͳ��ÿ̨װ�ÿɿ���֧��6��������1986�����Ƴ�Panermatic-S5֧�ܵ��ϵͳ��1987�꣬��˹�ط����ǹ�˾������(MARCO)��˾�������Ƴ�PM2��Һ����ϵͳ, �ڵ¹�³������Ӧ�ã�1990�����Ƴ����Ƚ���PM3��Һ����ϵͳ����Ϊȫ��ú��ʹ�����ĵ�Һ����װ�á�20����90������ڣ���˹�ط����ǹ�˾�����湫˾ֹͣ�������Ƴ�PM4��Һ����ϵͳ�������湫˾�Ƴ�PM31��Һ����ϵͳ[33]��
1985�꣬��ķ���ع�˾�з���Hetronic 200��Һѹ֧�ܵ�Һ����װ�á���ɭ�ɿ�����˾�������ӹ�˾�������Ƴ�CAIOI�����濪�ɿ���װ��,ÿ̨֧���϶���1����������������������Һѹ֧�ܶ�������λ��ͨ�����ȵ���[34]��
4.1.2 ����Һѹ֧�ܵ�Һ���Ƽ�����չ
1974�꣬Ϊ��ʵ��Һѹ֧�����Ƴ�����ƣ�������ҵ�Զ����о������Ƴ�Һѹ֧�ܵ�YPK��ѹ�������������ȵȼ��ﵽ2.5��������ѹ��8��16 MPa���������Ϊ2.5%���ڿ���ú��������ֳ�����[35]��
1985�꣬����ú���е����ʼ����֧�ܵ�Һ����ϵͳ��1989�����Ƴ�BMJ-����֧�ܵ�Һ����ϵͳ���������������飬1990�������20̨֧�ܵ�Һ����ϵͳ��1991��7���ڽ��ǿ���ֹ���Ժ��ʼ��С�������¹�ҵ�����顣��ϵͳ��ʵ�������ڼܵ��ܵ�������Һ����,���Կ���֧��8��12�������������ڼܵ��ܡ��������Ƽܡ�������ѭ�������ij�����ƣ�����֧�ܵ��Զ�������ơ��ڴ˻����ϣ��ó��Ľ��������2��BMJ-����֧�ܵ�Һ����ϵͳ��1992��12����1995��5���ھ��½����˹�ҵ������[36-37]��
1991�꣬����֣��ú�������Ƴ�DYZK-����֧�ܵ�Һ����ϵͳ��1992��5���ڴ�ͬ��̨�����20��Һѹ֧�ܵľ��¹�ҵ�����飻1993��ó��з���DYZK-����֧�ܵ�Һ����ϵͳ,�ںӱ���̨ú����о��¹�ҵ�����鲢ͨ��������2008�꣬�ó����Ƴ�DYZK-���͵�Һ����ϵͳ��������������[33, 37]��
1995�꣬������ú��ʼʹ��WS1.7-210/450�͵�Һ����Һѹ֧�ܣ������ҹ������ĵ�1��Һ����Һѹ֧�ܣ��ɵ¹���˹�ط����ǹ�˾���죬����PM4��Һ����ϵͳ[38]��
1996�꣬ú̿��ѧ�о���Ժ̫ԭ��Ժ���ͬ����ֺ������Ƴ�YLTʵ����Һѹ֧���ڼܵ�Һ����ϵͳ����ϵͳ��ʵ��˫ͬ�ڼܡ�˫��˳��˫����������ơ������Ƽ��Լ���ܿ����������ͻ��ȹ��ܣ��ڴ�ͬ�����������������˹��ڵ�1��ȫ��Һ����֧�ܵĹ���������,�ղ��ﵽ7000 t/d���Ƽ��ٶȿɴ�98 m/min[39]��
2006�꣬������������˾���Ƴ�SAC��Һѹ֧�ܵ�Һ����ϵͳ����ϵͳ��֧�ܿ��������˻��������桢�������ѹ����������λ�ƴ�����������ȵ����������װʽ��ܻ�����ɣ�2008��9�½�����ȫ������Һѹ֧������[40]��
2007�꣬�Ĵ�����װ����˾���Ƴ�ZDYZҺѹ֧�ܵ�Һ����ϵͳ��2008��8������ú̿�����ƹ���ú��24207���������á�2009��,ɽ��ƽ�����ջ�������˾Ҳ���Ƴ�Һѹ֧�ܵ�Һ����ϵͳ[41]��
4.2 �����ú����Զ�̼��ؼ�����չ
1960������ڣ�Ӣ��ú̿�������ƶ����ڹ�����Զ�̲���ϵͳ(ROLF)�з�����1969������ʧ�ܣ���ԭ���ǵ�ʱ��е����ú��������������һ�룬�������ŷ�չ��ú�Զ����Ļ����Բ��ߣ������ܵ����ӿ��Ƽ����в��������Լ[22]��1974�꣬Ӣ��ú̿����������˹������Զ���ϵͳ���ָ�����ƽ�����������������ú����Һѹ֧�ܣ�Ҳ������������豸�����������ĵ���ƣ���ܹ���ͼ 10��ʾ��1993�꣬Ӣ����1��ȫ�Զ�������ʾ���������ڿ�����ú�������飬ʹ�۲ɹ������ܹ���Ϊһ�������Զ��ƽ���ú��ȫ������ÿ��ֻ��2��������Ա����������1����Ա�������������ֵ�࣬��1����Ա�ڹ�����Ѳ�ؼ�顣
ͼ10 Ӣ�����ڵĹ������Զ���ϵͳ����
1976�꣬����ͨ�õ�����˾�Ƴ��� GEAMATIK2000i�������Զ���ϵͳ����ú���¿��ɡ����䡢��ȫ3��������SST200i���������̨���в��ݣ��������ݴ���������ң������Ҽ�������ƿ��Զ�������������������dz�ַ��Ӿ�Ͳ�������������ݵĿ��Ʋ����Ǹ�������IJ�ú�������ʹ�����������Ѵﵽ�����������ʹ������ٶȡ�����ú��ú���������������ʹ���ú��[42]��1977�꣬���·�˾�Ƴ�EW-300-L����Ͳ��ú��������Զ�̼�ط�ʽ��������������м��п���̨�����ң�ؾ����3 km�����ö����ز��Ͷ�·��Ƶͨ������ң��ָ��ͼ����ź�[43-44]��
1979�꣬���������˶���;����������(RAM)�з��ƻ������а�����ú��Զ������Ӻ��Զ����������з���Telsafe-CA��ú������Զ�̼��ϵͳ��1980��7�¿�ʼ�����(Woods)˹����б������������5�꣬�ӻط��������վ�Բ�ú������Զ�̼��[45]��1985�꣬��������ú����Vouters��������������ƵIJ�ú������Telesafe-CA��Telesafe-DV���ϵͳ����ͼ11��ʾ���Բ�ú�������Զ�̼�ز�ʵ����һЩ�Զ������ܣ���ʵʱ���Ӳ�ú���鹤��״̬[15]��

1-������2-����Telesafe CA�豸��Զ�����źű�������3-����̨����ʾ����4-1 kV������£�5-Telesafe CAң��վ�豸��Զ�����źŽ�������6-�������վ�����̨��7-�绰�ߣ�8-��ú��λ�á�ҡ��λ�á�Һѹ��������������룻9-����Telesafe CA�豸��10-�ŷ������Һѹ�����ƶ�����ҡ�ۿ��������11-Զ�����źŷ�����
ͼ11 ������Telsafe���ϵͳ
20����80������ڣ������ڰ�����ķú̿�ֵĸ�Ү��(A H ���ѧ֧�)ú�����������˻��۲ɹ����棬���ç�����-8����ú���飬����̨�������ڽ��������ƽ���ڣ�ʵ�ֲ�úѭ����ҵң�غ����ٵײۺ��ú���Զ�������ƣ��ƽ������Һѹ֧����Զ������̨������ʵ��ң�أ�ң�ؾ���Ϊ40 m���ɴ�����˲�ú���������İ�ȫ�ԣ��ڹ�����ʵ�����˲���[46]��1994�꣬����˹��ɽ��е�Զ����о������Ƴ���ú��ң��ϵͳ����ƽ���ڰ������趨�ij���Բ�ú������ң�أ���ϵͳ���ڧ���-200���Ͳ�ú������ͻ��ú����ʵ�ֲ�ú�Զ���[47]��
2005�꣬���湫˾�Ƴ�JOS���ͨѶ����ϵͳ(JNA Outbye System)�������Զ����������ָ�����࣬��һ���Լ����Ϊ���������ݻ�ȡ�Ϳ���ϵͳ����������������Ļ�۲�ú����֧�ܺ����ͻ�����Ҫ�豸��״̬��Ϣ�������ݳ���������ݲ�����������ʵ�ֲ�����ԱԶ�빤������Զ�����ú����ͼ12��ʾ[48-49]��

ͼ12 �����ú����JOSϵͳ���ƽ���
2008�꣬�Ĵ����������ѧ�빤ҵ��֯(CSIRO)��LASCϵͳ�������Ż��������˲�ú���Զ����ơ�ú������ƽ�⡢������м�صȹ��ܣ��γ����ܹ�������ϵͳ�����⣬�ṩ���ܿ��ɷ�������ҵ��������ڲ���˹��İ�����(Anglo)��ҵ��˾���ܲ������ܵ����ң�����������ʵʱ��ء�2009�꣬�Ĵ�������ƥ(Nepean)��е��˾�����һ��Navixϵͳ�����ڿ�������˹ú��(Carborough Downs Mines)�Զ������ڹ����濪�ɣ���ϵͳ����LSAC���Ե����ӿڣ���ʵ������Ե�����Ԫ���������ڿ���װ���Ļ������ơ�
2012�꣬�������ɿ�˹(Kopex)��˾�з�����ú���۲ɼ�ص�Mikrusϵͳ����ͼ13��ʾ���ڲ���Ƥŵά��(Pniowek)ú���ǧ�������������˲��ԣ����������������Զ�̲�����ú������ȷ���ƿ����ٶȡ�����ȣ�����ʱ�鿴�����������ݣ�������������ϵͳ���е��غ�ά����

ͼ13 ����ǧ���µ�Mikrus���ϵͳ
4.3 ���ڲ�ú����Զ�̼��ؼ�����չ
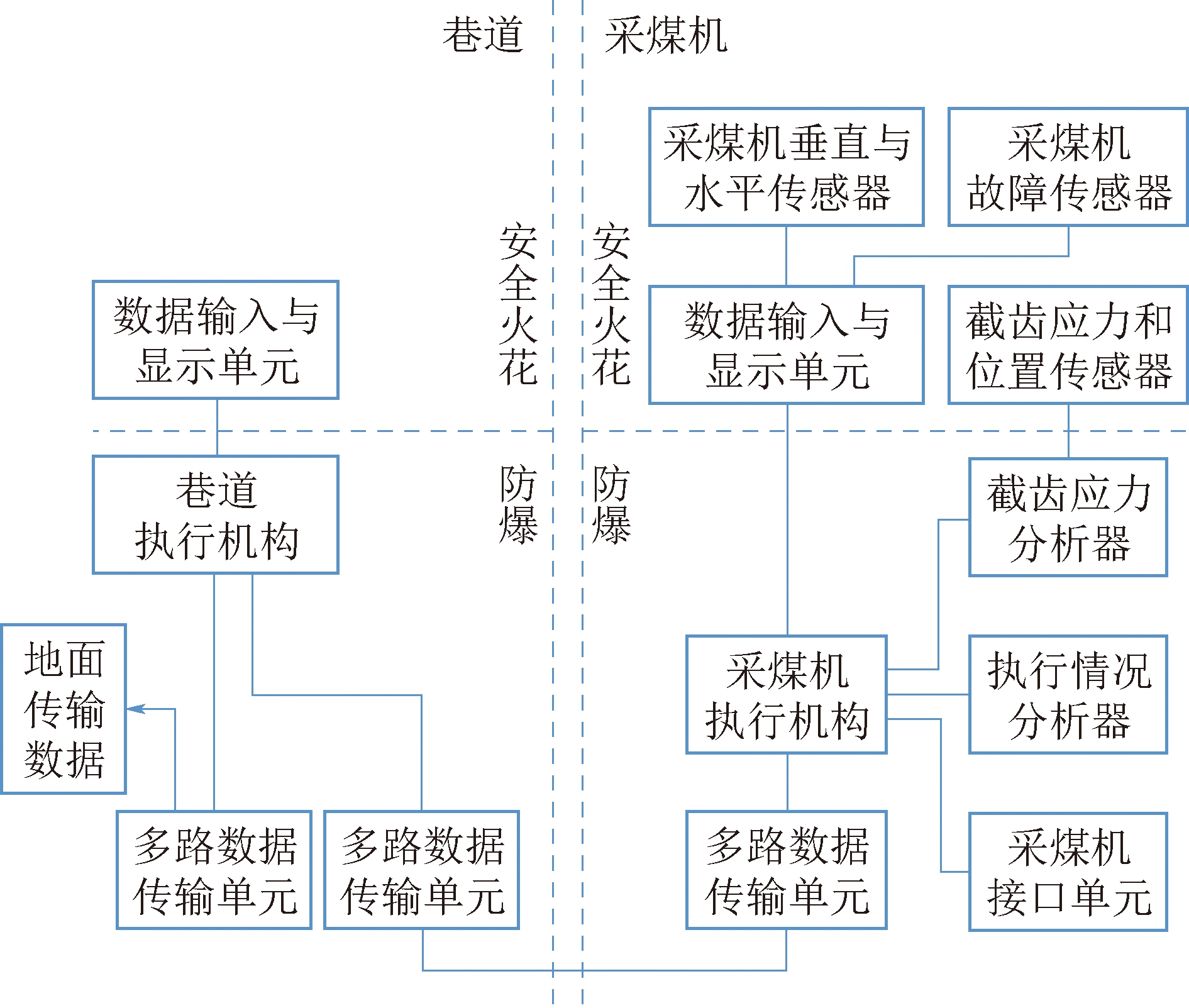
2008�꣬����ú���е����˾(ԭ����ú���е��)�����ҹ�ú̿��ҵ����ú��Զ�̼�����ģ�ͨ��������ģ��Ծ��µIJ�ú�����и��ټ�⣬���Ի������Ͻ��л��2010�꣬�й���ҵ��ѧ������ú���е����˾�����е����ҡ�863�ƻ����ص���Ŀ�о���ú��Զ��ң�عؼ�������������۲ɹ��������绯Эͬ���Ƽ����ܹ�����ͼ14��ʾ���з�����ú���������ϵͳ���Զ������ܰ�����ͨ���۲ɹ������������;�����̫�����ӣ����ڵ���ٿ�����ʵ�ֲ�ú�����Ʋ������ã�����ظ�ܼ�����Զ����������ú����������3Dʵʱ����չ�֣���ú������״̬�ͽظ�·�����в�������Ƶǣ����Ԫ�Ĵ��в��������ۺϷ���[50]��

ͼ14 �۲ɹ��������绯���Ƽ����ܹ�
2015�꣬��ؿƼ��Ϻ��ֹ�˾�Ƴ���Զ�̼�������ϵͳ����ͼ15��ʾ�������۲ɹ����滥��������Զ��ʹ�ð칫���ԡ�ƽ�塢�ֻ����ն����ӷ��ʾ��²�ú����ʵʱ�鿴�ͼ�ز�ú��������״̬����ʵʱ���ټ�ع����������״̬��ͨ��Զ�̷��ʲ�ú��ϵͳģ��������ɸ��ݾ���������������������Ż���ú������[28]��
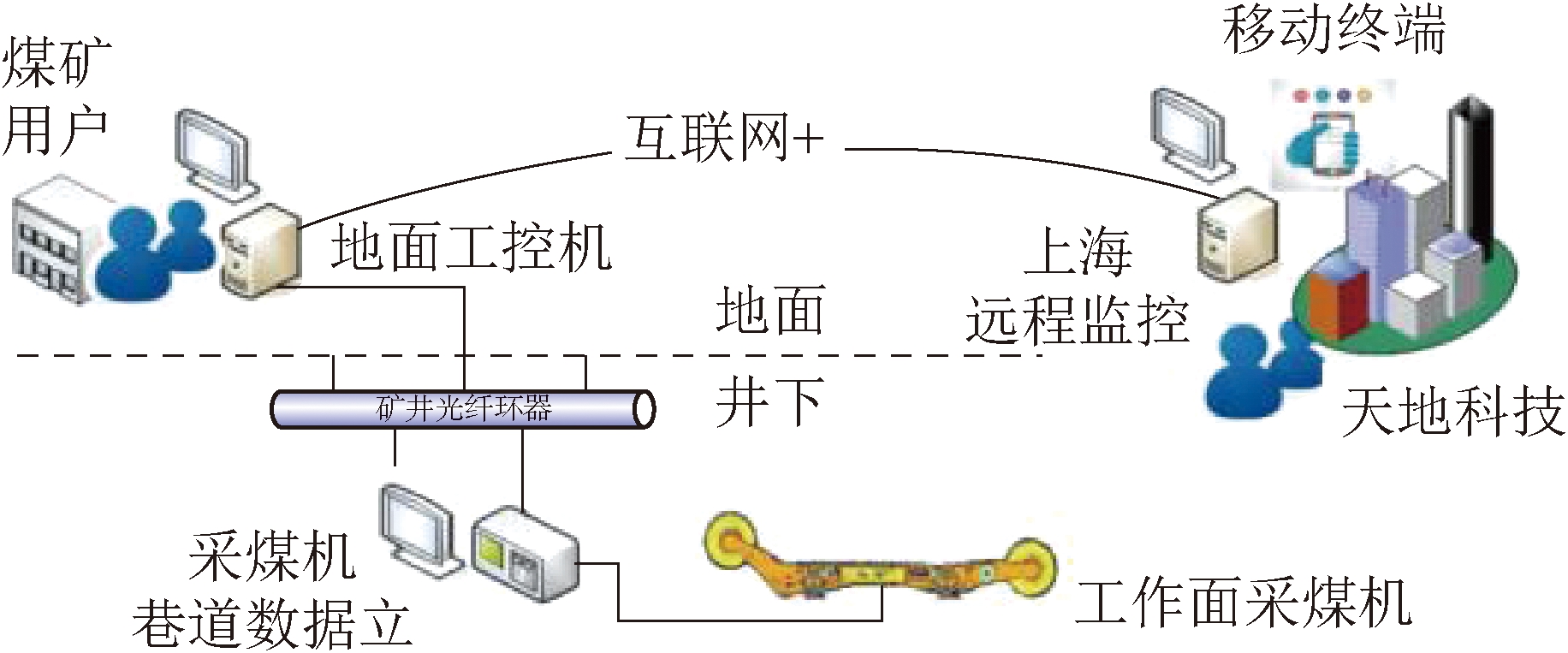
ͼ15 ��ú��Զ�̻�������άϵͳ
2014�̫꣬��ú����˾MG1100/3000-WD��ǣ����ú��������ڱ��غ�������м�������νظ��������ú��֧�������ϴ�������������Զ������ƹ��ܣ�Ԥ��RS485��CAN���߽ӿڡ��������ĵ��������̨ͨѶ����ʱĬ��Ϊ���ؿ��ƣ�ͨ����ʾ����Զ�˿����źſ�������Ϊ����������ƣ����ȼ�Ϊ���ؿ��ư�ť��>ң��>�������>������ơ���ú��û�й��ϱ���ʱ���Խ��м���ͷ��νظ�ڷ��λ����ظ������ʱת��Ϊ�˹�������
2018�֣꣬��ú���е���Źɷ�����˾(���¼�ơ�֣ú����˾��)�Ƴ��������з���Զ�̼��м�ؼ�ʻ�գ�����ȫ�Զ�����ģʽ�ͷ�ϵͳ�Զ�����ģʽ��ȫ�Զ�����ģʽͨ��һ����ͣ����վ��������ʽ���ͻ������������������ת�ػ��������ΰ����ͻ���������ú������(�ϵ�)����ú�������ú����������Һѹ֧�ܸ����ú���Զ������Ƴ���������������ȫ�Զ������У���ϵͳ�Զ�����ģʽ�ǵ������۲��豸�����Զ������Ƽ����м�⡣
5 ��ú������ظ��
5.1 �����ú������ظ����չ
1966�꣬Ӣ��ú̿����֯�з���ú���Զ�����ϵͳ�����ú�̽������Ϊ����ú���ȵ�̽��װ�ã�����Լ�˿���ú������˵�1�ξ��¹�ҵ�����顣1975�꣬Ӣ��ú̿����֯�з�������Ȼ���䴫�������Զ����߿���ϵͳ��1975�꣬Ӣ��ú̿����֯�з�������Ȼ���䴫�������Զ����߿���ϵͳ���ڲ�ú���ϰ�װ�˶�ú��Ȧ�����̽���ǺͲ�ú����б�ȡ�ҡ����Ǵ��������õ���Ͳ��ú�����������顣�ڲ�ú���ظúʱ�����洢������1����ҡ����Ǽ���ú(úƤ)���ʵ��������洢���ݽ��бȽϣ�Ԥ��ظ�߶����ݣ�Ȼ�����ҡ�۽Ƕ�������߶Ƚظ�ú�㣬��Ӧ��������ļ���ظ������[22]��
1976�꣬���·�˾�������ӹ�˾�Ȼ������˵��Ӽ����������Ƶ�EDW170-L˫��Ͳ��ú����Һѹǣ��������EE20�Ϳɿع�����ֱ�����ǣ�������档��ú����װ����ʱ�����ɸߡ���λ���ٶȡ����¡���ѹ�������ת�١����١���Χ�¶ȵ�װ�ã���Ϣ�ɶ�·��Ƶϵͳ���䡣��úʱ������˾�����ݸ��1��������¼����Ӽ�������ɵ��Ӽ������������ݲ�ú���Զ���ú[51]��1985�꣬���·�˾���Ƴ��˾��м���ظ�ܵIJ�ú����������ظ������Դ�ڻ����˿����еġ�ʾ�̸��١����ԣ�ͨ���˹�ʾ�����и�ѧϰ�ȸ���Ԥ���������ݣ���Щ���ݿ����ظ����ڳ�����ơ��ڵ��������仯����£�����ʵ������������洢���ݡ�ͨ���պϵ��ڵ�·�Զ�����������ͺ����¶���ɵ�ƫ��趨�и�߶ȵ��ط���Ϊ50 mm[52]��
1982�꣬Ӣ���з���MIDAS70000ϵͳ��ú����ʵ���Զ��������У��ڲ�ú��ҡ��������801�ͦ����߶���ú����̽���ǣ���ú����װ��17����������1��������ʾ�����ɶԲ�ú���ڹ������λ�á���б�̶ȡ�����״̬����������������ʾ���Ӷ��Զ����Ƹ�ú�߶ȡ���ϵͳ�״���Ӣ����Լ�˿�����(Yorkshire)��˹��(Wath)��42�Ź�����ʹ�ã��Զ��ɸ߿���������ͼ16��ʾ���ÿ����Ⱥ���7��������ʹ����70000ϵͳ����������õİ�ȫЧ���������˽ظ�װ����Ħ�������۳�����������֧��֧��ʱ�ĽӴ�����������˿嶥�¹ʺ��Ƽ�ʱ�ķ۳����ӳ��˲�ú���ͽس�ʹ���������ﵽ�����ú�ʡ����ٲ�ú��������Ա��Ŀ��[53-54]��

ͼ16 Ӣ��70000ϵͳ���Զ��ɸ߿��ƶ���ظ�����
1982�꣬Ӣ���з���MIDASϵͳ��ú����ʵ���Զ��������У��Զ����߲�����Ҫ3���������ݣ���ú����ú�����ɵĽǶȣ��ظ�ǰ��ú���������ٶȣ���ú����ú���еĴ�ֱλ�ã����������Զ������Ȼ������̽��[54]�����ǣ�����ϵͳ�ᶪʧһЩ�ɸߣ��ڶ������100��150 mmúƤ�������Ӣ������δ���ƹ㡣
1987�꣬�ձ������������������Ƴ�װ�м���ú��λ�á�������Ǻ�Ͳ�߶ȴ�������˫��Ͳ��ú�������ݼ�����������ƽظ��Ͳ�ڲ�ú�����汣�ֺ㶨�߶ȣ��������ڵļ���ظ�ԭ����
1991�꣬����ɭ��˾������Electra 1000ֱ����ǣ����ú����������ʮӢ����۲ɹ�����ʹ�ú�װʱ�������Զ��������ϵͳ(MIMIC)�ͻ��غ���������Һѹ֧����������ϵͳ��
1993�꣬���湫˾�Ƴ�6LS3�͵�ǣ����ú����װ��λ�ô��������״����������м���ظ�ܣ�1995�꣬�Ƴ���1���Զ����ظ�ϵͳJNA SIRSA(Shearer Initiated Roof Support Advance system)���书���ǽ�����ú������ͷװ�úͻ�ͷ֧�ܼ���������ϵ��ʵ���Զ��������ܣ�1996�꣬�Ƴ�6LS5�͵�ǣ����ú�������м���ظ�ܣ�������˾�����˸ò�ú������û��ʹ�ü���ظ��[55]��1998�꣬�Ƴ���2���Զ����ظ�ϵͳMemory Cut���Ƕ�JNA SIRSAϵͳ�ĸĽ��������ú��Ҫ��Ϊ����ģʽ�������ģʽ����������ģʽ���ظ�ģʽ��ǰ3��ģʽ�IJ�����ڲ��ջ���ͬ(�ΰ������ú����ǰ��Ͳλ��)���ظ�ģʽͨ��ʾ����ѧϰ��¼����������������Զ��ظ�ѧϰ���Ĺ�Ͳ�켣��2008�꣬�Ƴ���3���Զ����ظ�ϵͳASA(Advanced Shearer Automation)����һ��ȫ�Զ��IJ�ú���ظ���Ƴ�����ǰ�����Զ����ظ������ȣ������˱��������ơ����߱�̡�ģ��ϵͳ��˫ͨ��ң��������Ӳ�����ܣ����ñ���������¼ú��λ�ã�����ͨ��Ԥ���趨�ظ�������Ԥ����ú������Ͳ�Ľظ�켣[56]��2011�꣬�ù�˾��7LS8��ú����ʹ��Smart Cut���ܽظ����ϵͳ���ǶԼ���ظ�ϵͳ�Ľ������ĸ���ú���Զ������ܣ����ӵ�2����Ҫ����Ԫ���ǡ�ͼ�����߱༭�����͡�ҡ�۾�ȷ����ģʽ������ԭ�е��Զ������ƹ�����ϣ���ͬ��ɲ�ú�����������ڹ�������Զ������У���ϵͳ�ڴ�����ú��7 m��ɸߵ�52304����������[57]��
5.2 ���ڲ�ú������ظ����չ
1982�꣬�й���ҵ��ѧ�ڼ���ú�������в�ú������ظ�������飬��δ��ʵ��Ӧ�ã��˺���ڼ���ظ��ú������ͣ�����о����档ֱ��2004��5�£�������ú̿��˾�ھ����ú���Ͻ����˹������Զ������������ظ����飬2005�����ܼ���ú��45204�����桢������ú��02203������Ͳ�����ú��31306������ʵ���˼���ظ�[58]��
2010�꣬����ú���е����˾���й���ҵ��ѧ�����е����ҡ�863�ƻ����ص���Ŀ������ú������ظ�ܼ�����ظ��Զ����������Ƕ��MG900/2210-GWD�Ͳ�ú��������������������˹�ҵ������[50]��
2011�꣬��ؿƼ��Ϻ��ֹ�˾�ڽ��ǹ���Ժ������˹���װ�����Զ������������飬ʵ���˲�ú���̼��估�Զ������С���������������ظʽ������ʵ��ѧϰ�IJ�ú����ʵ������ͷ���ӵ�б�С�������ú��ɨ���Զ��ظ����У���֧��31���ظ�նεļ���ظ���ƺ��ָ��ӹ�����Ķ�ͷ�ظ�գ�ʵ���˲�ú��ѭ����ҵȫ�����Զ����ظ֧��Զ�̼���ظ�ѧϰ[28]��
2014�̫꣬��ú����˾�е��˹��ҡ�ʮ���塱��������װ����չר���ú̿���ܻ��۲���Ŀ����ú̿�۲ɳ���װ�������ܿ���ϵͳ���о���ʵʩ����MG1100/3000-WD��ú����ʵ���˱��غ�������Ƶļ�����νظ���ݹ���ģ�͵�ʾ����ѧϰ����ú���������в��������˹��������һ������ѭ��֮��ú�����ɿ�ʼ����ظʵ���Զ�ǣ�����Զ����ߣ�ͬʱҲ�����˹���Ԥ�����¼���ظ����ݿ⡣
2016�꣬�й���ҵ��ѧ�е����ҡ�973���ƻ���Ŀ�о��Σ��ú�����˲ɾ�װ���ؼ�����������˻����˻���ú������˼·����ͼ17��ʾ������̫��ú����˾�����з�������ú�������ϢMGIS�IJ�ú�������ظ�����γ����ںϵ�����Ϣ�IJ�ú���ظλ�뵼�ط�����ȡ�������˼�ʻ��ú����5�ֵ��ؼ�����ͻ�ơ�

ͼ17 ���˼�ʻ��ú����5���˶����ؼܹ�
6 ����
�ҹ�ú̿��ҵ�������ƶ�ú̿�������������Ĺؼ�ʱ�ڡ�2020��2�£����ҷ�չ�ĸ�ί�Ȱ˲��ŷ��������ڼӿ�ú�����ܻ���չ��ָ�������,����ú�����ܻ���Ϊú̿��ҵ��������չ�ĺ��ļ���֧�ţ��˹����ܡ���ҵ���������Ƽ��㡢�����ݡ������ˡ�����װ�����¼�������ú̿�������ã�ʵ��ú�������������ܻ����С�����2020��5�£��ҹ��ڲ���ȫ��Чú����901��(����¶���28��)������ռȫ��ú̿������56%�������ܶ�ռȫ��ҵ��78%����ú��е���̶�99.9%��Լ��370�����ܻ������棬��Щ��ȫ��Чú��İ���������ʵ���0.0015����˵�����ܻ�����δ����һ�������ҹ�ú��ȫ��Ч���������ı���֮·��
��ǰ�IJ�ú�����ڸ��Զ����Σ������������ܻ��Σ���Ҫ������ǿ�����о���ͻ�ƹؼ����ļ�����һ�Dz�ú�����ˡ���������Ϣ������֪�����������������ֳ�������Ϣ�����п���ϵͳ�����չ滮ϵͳ����Ϣ�������������������ܲ�ú�����Ƶ��������ߣ����Dz�ú����ǿ�˹����ܼ����������ܷ�����Ϊ��߲�ú���ǻ���������Ч;������߲�ú���Ըп�����������Ӧ���������Ż����������ǹ������ܲ�ú���������������ƽ̨���Dz�ú���߱���ǿ����Ϣ�ɼ�����Ϣ�洢�������ھ�����Ӧ�ú����ܿ�������������ϵͳ�з���ú����Ļ����˻�������ʹ֮��Ϊú��Σ�ջ������Ի��������˵���ŵ㣬ȫ��ú����Σ�ո�λʵ�����˻���ҵ��Լ��40��̨ú������ˣ����а��������˻���ú����Һѹ֧�ܺ����ͻ�װ����
��л�����Դ�����Ϊ�ҹ���ú���Զ�����չ����Խ����ǰ�����¾���������лΪ�������������ṩ�������й�֪�����ٶ���ѯ��360�ٿƵ���Ϣƽ̨�����������IJ�ú�������з���ݿ�����ƫ�����߰���У���Ͳ��䡣
�����:
[1] D G Osborn. Automation of Industry����A Geographical Consideration[J]. Journal of the American Institute of Planners, 1953, 19(4): 203-213.
[2] B A ����������Ʒ�����י. �������Զ����Ϳ�ѧ������[J]. ��ѧͨ��, 1954 (6): 36-41.
[3] ��ʿ�. ����ú���Ͳ�ú���������Զ����ɵ��������롰�����ú���� [J]. ������ҵѧԺѧ��,1955 (2): 105-113.
[4] B N л���. ��ú�����Զ���[J]. ú̿����,1985 (4): 17-22.
[5] ���IJ�. ������ú�������������ɵ�����[J].ú�����,1988 (4): 40-44.
[6] ������. ��ǣ��˫��Ͳ��ú��[J]. ú̿��ѧ����,1978��6 (8): 59-60.
[7] ��ϣ��. MLS3-170�Ͳ�ú��ǣ����Һѹϵͳ��ѹ������װ�õ���ѧģ��[J]. �й���ҵѧԺѧ��, 1991, 20(4): 74-80.
[8] �ط���. ������ǣ����ú���ĺ㹦�ʿ���[J]. ú, 1998, 7(1): 60-62.
[9] ������. ����������ú�������յ������ص�[J]. ú��, 1992(9): 46-49.
[10] ������. �̲���Ӧң���ڹ���ú���е�Ӧ�ü��[J]. ú���Զ���, 1973 (4): 22-27.
[11] ����Դ. �����Ӳ�ú�����ߵ�ң��װ��[J]. ú���Զ���, 1985 (4) : 55-58.
[12] ɽ������. �ɵ��߹�Ͳ��ú�����������[J]. �����Զ���, 1973 (3): 35-40.
[13] ����ӡ, ١����. ������ú���ú��[J]. ú̿����, 1982 (3): 65-87.
[14] ʷ����. ������ú���Ŀ��Ʒ�ʽ[J].ú�����, 1987 (1) : 59-62.
[15] ������. ���Ͳɾ��е��ң��װ�ú���Ϣ����ϵͳ[J]. ú̿��ѧ����, 1988��16(9): 55-57.
[16] ��������֣��Ĵ���ҵѧԺ������ú̿��ѧ�о���. �����������ͷ�������߸�Ӧʽ���������������[J]. �����Զ���,1973 (1) : 11-17.
[17] ���з���ׯ����ɶӣ�����ú̿��ѧ�о����Զ����о���. ���ߵ���ز�ú��װ�ý���[J]. �����Զ���, 1973 (1): 1-10.
[18] ��ʵ��. MD-150�Ͳ�ú�����ߵ�ң�ؼ������ز�����[J]. ú̿��ѧ����, 1978��6(9): 11-17.
[19] �ط���. ���ߵ�ң�ش���Dz�ú��[J]. ú, 1996, 5(1) ��52-55.
[20] �̶���������������. ����Ƭ��ϵͳ CC2530 �IJ�ú��Զ��ң��װ�����[J]. ��ɽ��е, 2010��38(3): 19-21.
[21] ������. ú̿��ҵ100��(��һ)[J]. �й�ú̿, 2004, 30(7): 60-61.
[22] ����ˡ���˹���ͺ������廪. Ӣ���������Զ�����չ����[J]. �����Զ���, 1981 (3): 45-53.
[23] �Ϸ���. ���ڹ������Ͳʽ��ú���Զ�����[J]. ú���е, 1987 (4): 24-26.
[24] ������. �¹�ú��زɹ�������¼���[J]. ú�����,1992 (6) :49-51.
[25] ������. Faceboss��ú�������ú��Ӧ��ʵ��[J]. ú̿����, 2009, 14(5) : 65-66.
[26] U ��л�¸�. DBT��˾���Զ������ڿ����豸[J]. �й�ú̿, 2003, 29(6): 62-63.
[27] ������������. ����DSP��CAN���ߵIJ�ú���ֲ�ʽ����װ��[J]. ú̿��ѧ����, 2008, 36(3): 4-7.
[28] ����ᣬ�������ׯ����. ��ؿƼ��Ϻ��ֹ�˾��ú�����ܻ�������״��չ��[J]. �й�ú̿, 2019, 45(7): 33-39.
[29] ������. MG500/1220-WD�Ͳ�ú����������ϵͳ����[J]. �Ƽ��鱨�����뾭�� , 2008, 18(17) : 223-224.
[30] ������. Һѹ֧�ܳ�����Ʒ�չ������Һ����[J]. ú̿��ѧ����,1983��11(4): 56.
[31] �Ժ�ɽ. ������Һѹ֧�ܷ�չ����״��չ��[J]. ú̿��ѧ����, 1992��20(2): 15-19.
[32] R.C.����˹. ���ӿ���Һѹ֧��[J]. ú���е, 1987 (2): 38-41.
[33] ���������������������. Һѹ֧�ܵ�Һ����ϵͳ�ķ�����չ��[J]. ú�ɣ�2000 (2)��5-8.
[34] ���ء��ն���������˹��������Ƽ. ����Һѹ֧���·�չ[J]. ú̿������ 1986 (3)�� 54-57.
[35] �¸���. YPK��ѹ��������[J]. ��ҵ�DZ����Զ���װ�ã�1975 (2)��24-25.
[36] ë��Զ. Һѹ֧�ܵ�Һ����ϵͳ�����������[J].ú̿��ѧ������1993��21(3)��36-39.
[37] ������. Һѹ֧�ܵ�Һ����ϵͳ[J]. ú̿��ѧ������1991��19(10)��31-35.
[38] ����Ǽ־Ƽ. WS1.7-210/450�͵�Һ����Һѹ֧�ܵ�̽��[J]. ������ҵѧԺѧ�� ��1995��15(4) �� 344-348.
[39] ��������Ѧƽ. Һѹ֧�� YLT �͵�Һ����ϵͳdz��[J]. ú�����, 2001 (2) : 34-35.
[40] ��Ծ�£�ţ���壬Τ����. SAC��Һѹ֧�ܵ�Һ����ϵͳ��������Ӧ��[J]. ú̿��ѧ����, 2008,36(12):102-104.
[41] �����. ����Һѹ֧�ܵ�Һ����ϵͳ���ƹ���ú���Ӧ��[J]. ������, 2009 (10): 113-114.
[42] �����. ���� GEAMATIK2000i�Ϳ��ð�ȫ���Զ���ϵͳ[J]. �����Զ���, 1978 (3): 39-46.
[43] �̾���. EW-300L�Ͳ�ú���г�������ʾ���г�Ԥѡ[J]. ú���Զ���, 1983 (4): 30-35.
[44] ������. ��EW-300-L�Ͳ�ú������ϵͳ�Ľṹ����[J]. �����Զ�����1981(3): 21-24.
[45] M ������. �ƶ�ʽ�ɾ��е��Զ������Ӻ��Զ���[J]. ú�����, 1988 (6): 49-51.
[46] ������ŵ��˹����˷�, ������������Ҳ��, ������.���������۲ɹ�����ͨ����ҵ�������[J]. ����ú̿����, 1989 (4): 59-63.
[47] B H ������, ֧�ұ�. ��ú���Զ���[J].�й�ú̿, 1997,23 (2): 55-56.
[48] ��ʿ��. ��ú���Զ������˹����濪��[J]. �Ƽ���Ϣ,2009 (33): 355.
[49] �������������������. dz̸��������JNA˳��ϵͳ�ĵ���ԭ��[J].�Ƽ�����ҵ, 2014 (11): 144-145.
[50] �⺣��. ���ʴ�ɸߵ�ǣ����ú����������Ӧ��[J].���ͻ�е,2010 (6) : 9-12.
[51] ����Ȩ. ��Ͳʽ��ú���ļ���ˮƽ�ͷ�չ����[J]. ú̿��ѧ����,1979��7(2): 61-63.
[52] K H κ��������Ȩ. �����ͼ�����Ĺ�Ͳ��ú��[J]. ú̿����, 1988 (4) :22-25.
[53] �̹�. ������߲�ú����ȫ���ܵ���װ��[J]. ��ҵ��ȫ�뻷��, 1986(4): 51-54.
[54] B F ��ɭ. ��ú���Զ�����[J]. ú̿����, 1986 (2) : 7-11.
[55] ��������������. ���ڴ����Զ�����ǣ����ú������״�ͷ�չ[J]. ú����磬2003 (5)�� 39-43.
[56] ������. JOY ASA���Զ���ϵͳ��Ӧ���о�[J]. �����Ʒ�����봴��, 2016, 29(5): 65-68.
[57] ������������.Smart cut���ܽظ����Ӧ��ʵ��[J]. ����ú̿, 2012 (5): 106-108.
[58] �Ļ���. �Զ����۲ɹ����漼��Ӧ��[J].����ú̿, 2007 (1): 59-60.
The development history of coal shearer technology (Part five)
����automation technology
Ge Shirong1,2
(1. School of Mechanical, Electrical & Information Engineering, China University of Mining and Technology-Beijing, Haidian, Beijing 100083, China;2. Institute of Intelligent Mines & Robotics, China University of Mining and Technology-Beijing, Haidian, Beijing 100083, China)
Abstract The automation of shearer is the key technical supporting the fully mechanized workface towards autonomous mining workface, and it is the important research topic for the shearer technology development in the past 60 years. The earliest research on coal mining automation originated in the 1930s. At the 1960s, the inovation of shearer automation technology came to an active stage. The United Kingdom and the former West Germany made original contribution and leading innovation on the shearer remote control technology, computerized speed control technology, on-board automatic control technology, remote monitoring technology, memory cutting technology and electro-hydraulic control technology of hydraulic support. Since the beginning of 21st century, the automatic control technology of shearer in China has developed from introduction to learning and then to independent innovation, achieving the fast development through the roadmap of catching up and accelerated climbing steps. In the past 10 years, China's shearer control system had been close to foreign advanced technology, the imitation cutting technology beyond memory cutting technology was developed, the remote controlling system had been upgraded to cockpit system, the electro-hydraulic control technology of hydraulic support had been independent manufactured and widely used. These automatic control technologies for shearers have significantly improved the level of automation of coal mine production in China, and enhanced the safe and efficient production capacity of coal mines in China.
Key words coal shearer technology, automation technology, automatic speed control, automatic cutting, artificial intelligent, remote monitoring
��ͼ����� TD421.6 TD67
���ױ�ʶ�� A
width=77,height=77,dpi=110
�ƶ�ɨ���Ķ�
���ø�ʽ��������. ��ú��������չ����(��)�����Զ�������[J]. �й�ú̿��2020��46(10)��1-15.doi: 10.19880/j.cnki.ccm.2020.10.001
Ge Shirong. The development history of coal shearer technology (Part five)����automation technology[J]. China Coal��2020��46(10)��1-15. doi: 10.19880/j.cnki.ccm.2020.10.001
����飺������(1963-), ��, ����, �㽭��̨�ˣ����ڣ��й���ҵ��ѧ(����)У�����������ܲɿ�װ����Ħ���ɿ��Թ����о������ٻ��ҽܳ������ѧ���� ��������á��й�����Ƽ���������������ͻ�����������꼼��ר�ҡ�����ȫ������Ƽ������ߡ�����������������Ƽ�������������������Դ��̳�������½���������Խ����Դ�Ƽ����͡��ڶ���ȫ���������Ƚ�״���� E-mail: gesr@cumtb.edu.cn��
(���α༭ ����֥)