
实验照片
我这篇文章介绍的是:如何用 Arduino和Labview控制两台直流电机,Labview作为上位机,Arduino作为下位机,要驱动电机,就需驱动板,我介绍个与 Arduino兼容的L298驱动板,它可以和ATMEGA328 Arduino控制器上下层叠,驱动电流最大达2A。
本实验的Arduino设备源于DFrobot官方旗舰店: http://dfrobot.taobao.com/
ATMEGA328 Arduino控制器

L298驱动板图:
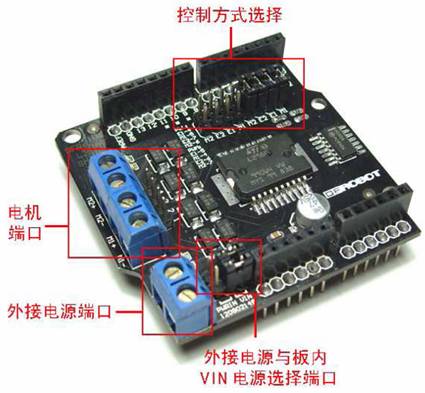
L298大功率直流电机驱动器采用LGS 公司优秀大功率电机专用驱动芯片L298P,可直接驱动2 个直流电机,驱动电流最大达2A。该电路线路布线合理、均采用贴元件片、体积小、方便安装,输出端采用高速肖特基二极管作为保护。
这个L298驱动板可以单独供电,也可以和Arduino控制器和传感器IO扩展板共用同一个电源,如果选择单独供电,电源需从上图外接电源端口接入电源,并且把跳线帽选择在PWRIN,而把VIN悬空。如下图所示:

如果你选择和Arduino控制器和传感器IO扩展板共用同一个电源,这三个板子可以上下层叠,电源就要从Arduino控制器或者传感器IO扩展板接入,跳线帽选择在VIN。
我为啥老讲电源接入问题,主要要注意如果L298驱动板和Arduino控制器和传感器IO扩展板共用同一个电源,那么这个电源的质量和功率的要求更高,由于两台电机都是耗电元件,所以运行时电流消耗较大,电源功率不够,会导致电源电压下降,致使电压达不到Arduino控制器的5V要求,程序运行不正常,上下位通信失败。我做这个实验折腾了3天,Labview和Arduino通信总是出错,后来发现是电源问题。所以你要L298驱动板和 Arduino控制器和传感器IO扩展板共用同一个电源,这个电源不能用一般学习板和手机充电的稳压器,也不能用一般的碱性电池,电源要5V 2A以上,所以我专门买了2400mA的充电电池,像下图那样。
我的实验照片里采用给L298驱动板专门供电,压在L298驱动板下的Arduino控制器用的电源是USB提供的,所以两套电源分别供电,电源的要求可以低一些。但是我还是用了功率足够的5V 3A稳压电源。
这个驱动板用四个控制端口驱动两个电机,分别是电机1的使能端口E1和转向端口M1,电机2 的使能端口E2和转向端口M2,通过Arduino程序向这4个端口发信息,就可以控制两个电机的启停,转向和速度。
E1和M1的功能表:

E2和M2的功能表:
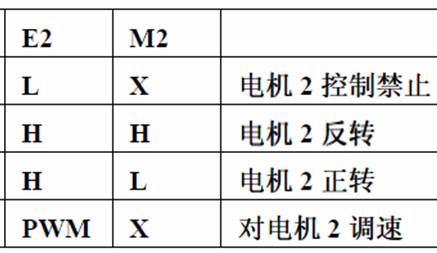
功能表对看懂下面的Arduino程序有帮助。
Arduino程序主要是有两个任务:1、接收上位机Labview下传的6个字节的控制命令,2、根据这6个字节,向驱动板的E1、M1、E2和M2发信息,控制两台电机的运行。
这 6个字节,前3个控制电机1,后3个控制电机2,第一个字节如果是0x11,则电机1启动,如果是0x22,则电机1停止,第二个字节如果是0xAA,则电机1正转,如果是0xBB,则电机1反转,第三个字节控制电机1运行速度,字节的值为0~255,值越大,电机转得越快,后三个字节是控制电机2的,看程序吧。程序中,我用了数组val[6]来存放6个字节。
int E1 =5; //连接电机1的使能端口到数字接口5
int M1 =4; //连接电机1的转向端口到数字接口4
int E2 = 6;//连接电机2的使能端口到数字接口6
int M2 =7; //连接电机2的转向端口到数字接口5
byte val[6];//上位机发出的六个电机控制字节的暂存数组
void setup()
{
Serial.begin(9600);//连接到串行端口,波特率为9600
pinMode(M1, OUTPUT);
pinMode(E1, OUTPUT);
pinMode(M2, OUTPUT);
pinMode(E2, OUTPUT);
}
void loop()
{
//Serial.available()记录了读缓冲区当前还没有被读的字节数目
delay(10);
if (Serial.available()>0) //如果读缓冲区的字节没被读取完
{
for(int i=0; i<6; i++)//for循环次数与上位机下传的字节数一致
{val[i] = Serial.read();}
}
if(val[0]==0x11) //电机1启动
{
if(val[1]==0xAA) //电机1正转
{
digitalWrite(M1,HIGH);
analogWrite(E1,val[2]); //电机1 PWM调速
delay(30);
}
else if(val[1]==0xBB) //电机1反转
{
digitalWrite(M1,LOW);
analogWrite(E1,val[2]); //电机1 PWM调速
delay(30);
}
}
else
{
digitalWrite(E1, LOW); //电机1停
delay(30);
}
if(val[3]==0x33) //电机2启动
{
if(val[4]==0xCC) //电机2正转
{
digitalWrite(M2, HIGH);
analogWrite(E2, val[5]); //电机2 PWM调速
delay(30);
}
else if(val[4]==0xDD) //电机2反转
{
digitalWrite(M2, LOW);
analogWrite(E2, val[5]); //电机2 PWM调速
delay(30);
}
}
else
{
digitalWrite(E2, LOW); //电机2停
delay(30);
}
}
上位机Labview的框图程序:
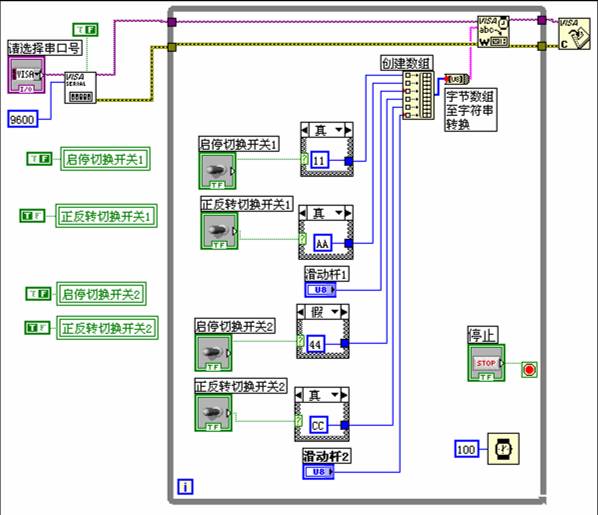
你看程序中的创建数组VI,是几个字节生成一个数组,再把数组变成字符串下传到Arduino控制器,是6个字节,这6个字节的用处,上文已述。
框图程序支撑的Labview前面板如下:
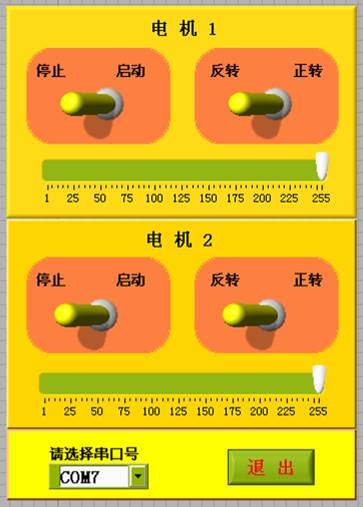
Labview前面板是人机交互的界面,大家可以轻松的点击鼠标,控制我桌子上的两台电机了!
Labview和Arduino程序打包下载:
两台直流电机驱动控制.rar
我用的Labview的版本是8.2,Arduino版本是0018,可以免费到Arduino公司网站下载。Arduino公司网址:
http://arduino.cc/en/Main/Software
Arduino软硬件都是开源的,主要用于互动媒体和机器人,在国外这两个领域用它很多。

