这个实验用到的无线数传套件是APC220,它是国内一家公司出品的,淘宝很容易买到。
本实验的Arduino设备源于DFrobot官方旗舰店:http://item.taobao.com/item.htm?spm=1101*r1F.3-1mJ7Y.h-5h6gmz&id=227289063&

安装CP210x_VCP_Win2K_XP_S2K3 USB转RS232的驱动,该软件请下载: http://115.com/file/bes5w3nl#CP210x_VCP_Win2K_XP_S2K3.rar,
复制网址到浏览器搜索栏,回车,就会看到115网盘下载网页。
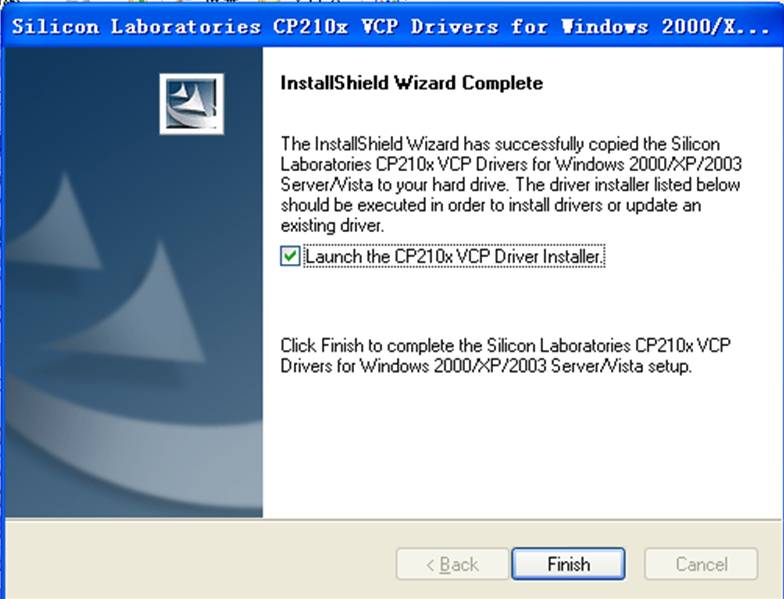
该驱动软件安装到下图这一步,要把图中选项打勾,继续安装才行,别急着,按下“finish”按钮。
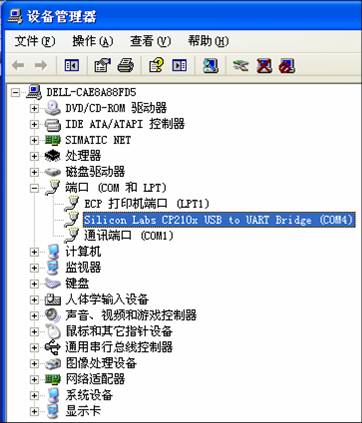
用这个套件首先要安装CP210x_VCP_Win2K_XP_S2K3 USB转RS232的驱动,安装完驱动,就可以用RS232串口协议进行无线通信,所谓透明协议,我感觉就像用RS232有线通信一样,搞无线通信。驱动安装后,你应该在Window的设备管理器观察“USB转RS232的驱动”所生成的串口号是什么?如下图:
然后用厂家的RF-ANET软件给无线数传套件设置通信参数,注意要把这个套件的两个无线通信模块通过USB适配器都要设置,设置的参数可以一模一样,就按照下图即可。
RF-ANET软件请下载:apc220.rar
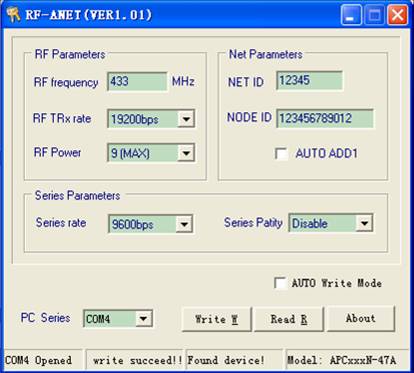
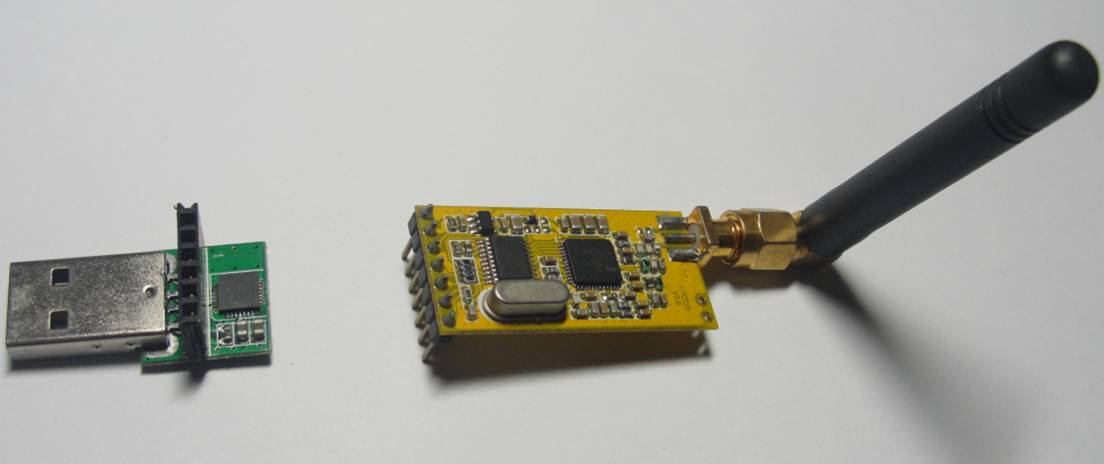
一定记住用厂家套件自带USB适配器,设置上图参数啊!我在网站买的套件里的USB适配器如下图:
我这个实验较简单,就是用labview遥控Arduino小车,前进、后退和停止。供操作用的前面板如下图:

框图程序如下:
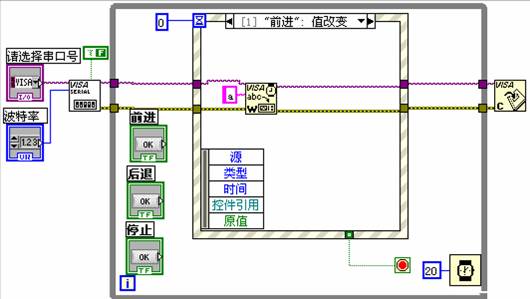
框图程序可以看出,我用了一个事件结构,点击“前进”按钮,进入“前进事件分支”,向下位机发送字符'a',“后退事件分支”,向下位机发送字符'b',“停止事件分支”,向下位机发送字符'c'。
下位机Arduino控制器接受到字符,判断是'a'、'b'还是'c',然后发出命令驱动小车行动,程序中有个调节车速的变量,可以通过一个电位计模块调节车速。
Arduino程序:
下载程序到Arduino控制器时,不要把RF无线数传插在Arduino控制器上的传感器扩展板的APC通讯插槽里,程序下载完再把无线数传插上去。
int E_right =5; //连接电机1的使能端口到数字接口5
int M_right =4; //连接电机1的转向端口到数字接口4
int E_left = 6;//连接电机2的使能端口到数字接口6
int M_left=7; //连接电机2的转向端口到数字接口5
int potpin=0;//定义电位计相连的模拟接口0上
int val;
float velocity;//车速调节
void setup()
{
Serial.begin(9600);//设置串行通信的波特率
//给各数字接口设置输入输出状态
pinMode(M_right, OUTPUT);
pinMode(E_right, OUTPUT);
pinMode(M_left, OUTPUT);
pinMode(E_left, OUTPUT);
}
void advance()//前进
{
digitalWrite(M_right,LOW);
analogWrite(E_right,int(velocity));
digitalWrite(M_left,HIGH);
analogWrite(E_left,int(velocity));
}
void back()//后退
{
digitalWrite(M_right,HIGH);
analogWrite(E_right,int(velocity));
digitalWrite(M_left,LOW);
analogWrite(E_left,int(velocity));
}
void Stop()//停止
{
digitalWrite(E_right, LOW); //右电机停
digitalWrite(E_left, LOW); //左电机停
}
void loop()
{
//读电位计给出的车速调节值
velocity=(float)analogRead(potpin)/1023*255;
if(Serial.available()>0) //查询串口有无数据
{
val=Serial.read();//读取labview下达的命令
if(val=='a')//如果labview发送字符'a',则小车前进
{
advance();//前进
}
if(val=='b')//如果labview发送字符'b',则小车后退
{
back();//后退
}
if(val=='c')//如果labview发送字符'c',则小车停止
{
Stop();//停止
}
}
}
由于原厂提供的USB适配器和Arduino控制器的USB通信芯片型号不同,所以可以用原厂提供的USB适配器设置无限数传的通信参数,但是用原厂USB 适配器进行无线通信时,通信不成功,为了解决这个问题,换上个与Arduino控制器的USB通信芯片型号相同的适配器就没问题了!如图:
这个黑色的适配器需要FTDI驱动,请下载:http://115.com/file/bes5iyv5#CDM20602.zip,复制网址到浏览器搜索栏,回车,就会看到115网盘下载网页。
实际上您如果已经安装Arduino控制器的驱动,这个Xbee适配器就不需要再装驱动,因为它们的驱动都是FTDI驱动。
把黑色的XBee适配器与APC220无线数传的5V 、GND直接连线、XBee适配器RX和TX分别与APC220的TXD和RXD连线,再插到电脑USB口,电脑会提示您安装驱动,您需找到解压后的文件名为CDM20602的文件在电脑硬盘中的位置,点击确定,就能安装成功FTDI驱动。
驱动安装后,你应该在Window的设备管理器观察“FTDI驱动”所生成的串口号是什么?

一个无线数传模块通过上图的适配器连在PC机的USB上,另一个无线数传插在,层叠在Arduino控制器上的传感器扩展板APC220专门TTL插槽上。
Labview和Arduino程序打包下载:labview无线遥控Arduino小车.rar





