本实验的Arduino设备源于DFrobot官方旗舰店: http://dfrobot.taobao.com/
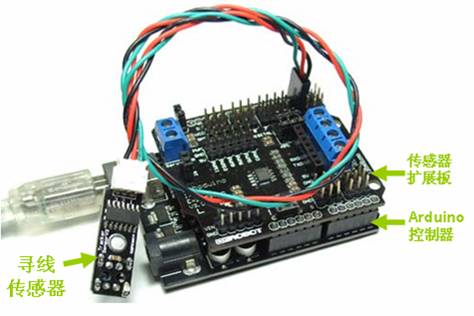
Mini寻线传感器可以帮助进行白线或者黑线的跟踪,可以检测白底中的黑线,也可以检测黑底中的白线。
输出接口:3线制接口(1-信号,2-电源正,3-电源负),可连在传感器扩展板的数字接口上。
输出电平:TTL电平(黑线低电平有效,白线高电平有效)
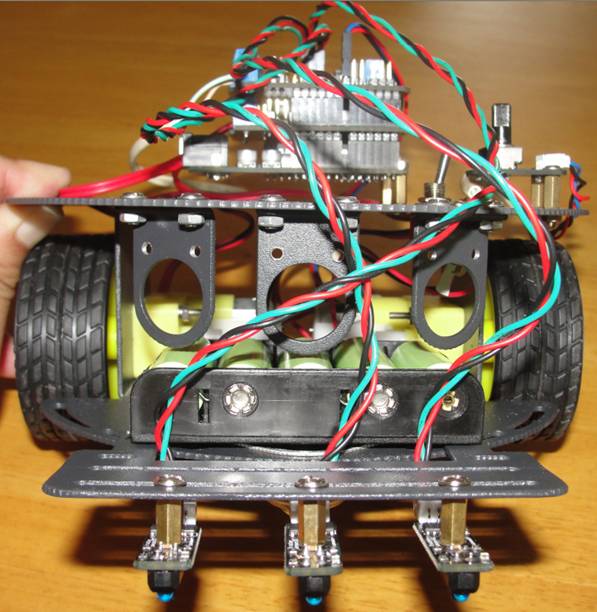
这个设计用到了3个寻线传感器在智能小车上,它们的安装图如下:
我用黑色的电工胶布贴在我家客厅的米黄色瓷砖地板上,让小车依靠寻线传感器提供的高低电平信号来判断车轮是前进、右转还是左转,以使小车能沿着黑色的跑道,向火车一样行进。
左、中、右3个寻线传感器,如果左边的传感器检测到黑色,发出低电平,那么小车应该右转还是左转?答案是左转。为啥?下面Arduino程序也是这样编写的,琢磨琢磨。
实验照片:

这个设计的Arduino程序:
int IR_right=9;//定义右侧寻线传感器接口
int IR_left=10;//定义中间寻线传感器接口
int IR_middle=8;//定义左侧寻线传感器接口
int E_right =5; //连接电机1的使能端口到数字接口5
int M_right =4; //连接电机1的转向端口到数字接口4
int E_left = 6;//连接电机2的使能端口到数字接口6
int M_left=7; //连接电机2的转向端口到数字接口5
int potpin=0;//定义电位计相连的模拟接口0上
float velocity;//车速调节
void setup()
{
//给各数字接口设置输入输出状态
pinMode(M_right, OUTPUT);
pinMode(E_right, OUTPUT);
pinMode(M_left, OUTPUT);
pinMode(E_left, OUTPUT);
pinMode(IR_right,INPUT);
pinMode(IR_left, INPUT);
pinMode(IR_middle, INPUT);
}
void advance()//前进
{
digitalWrite(M_right,LOW);
analogWrite(E_right,int(velocity));
digitalWrite(M_left,HIGH);
analogWrite(E_left,int(velocity));
}
void back()//后退
{
digitalWrite(M_right,HIGH);
analogWrite(E_right,int(velocity));
digitalWrite(M_left,LOW);
analogWrite(E_left,int(velocity));
}
void right()//右转
{
digitalWrite(M_right,HIGH);
analogWrite(E_right,int(velocity));
digitalWrite(M_left,HIGH);
analogWrite(E_left,int(velocity));
}
void left()//左转
{
digitalWrite(M_right,LOW);
analogWrite(E_right,int(velocity));
digitalWrite(M_left,LOW);
analogWrite(E_left,int(velocity));
}
void Stop()//停止
{
digitalWrite(E_right, LOW); //右电机停
digitalWrite(E_left, LOW); //左电机停
}
void loop()
{
//读电位计给出的车速调节值
velocity=(float)analogRead(potpin)/1023*255;
int Right,Left, Middle;
//读红外寻线传感器的信号
Right=digitalRead(IR_right);
Left=digitalRead(IR_left);
Middle=digitalRead(IR_middle);
//如果右、左两个红外为高电平,中红外为低电平
//说明小车没有偏离黑色条纹跑道
if(Right==HIGH && Middle==LOW && Left==HIGH)
advance();//小车前进
//如果左红外为低电平
else if(Right==HIGH && Middle==HIGH && Left==LOW )
left();//小车左转
//如果左、中红外为低电平
else if(Right==HIGH && Middle==LOW && Left==LOW )
left();//小车左转
//如果右红外为低电平
else if(Right==LOW && Middle==HIGH && Left==HIGH)
right();//小车右转
//如果右、中红外为低电平
else if(Right==LOW && Middle==LOW && Left==HIGH)
right();//小车右转
else
Stop();//小车停止
}
设计与实验是个交互的过程,没有一步到位的设计,通过实验发现软硬件设计的问题,通过实验来完善设计。
这个寻线小车的设计也经历了这样的过程,通过这样的交互完善的过程,我总结了以下几点经验:
1、寻线传感器应与被测物体近些,距离越远,传感器受环境光的干扰越大,所以我通过铜柱把传感器安装到铝合金传感器支架上,就是想让传感器离地面近些。但是也不能过近,这样会影响光的传导,所以可以用个土办法,可以向上抬高些传感器,就是向上稍微弯曲传感器支架。
2、黑色电工胶布我贴了两道,这样可以加宽黑色跑道,便于小车寻线。左、右寻线传感器与中央传感器之间的距离要小于黑色跑道宽度,如果大于,会出现3个传感器都检测不到黑色,这样根据程序,小车就会在跑道上停下来。同时左、右寻线传感器之间的距离要大于黑色跑道宽度,为啥?如果左边和中央的传感器都检测到黑色,应该左转,这在程序中有体现。
3、小车的速度不能太快,否则在直道变弯道时,小车会因为惯性而冲出跑道。太慢则小车的行进速度,哈哈。所以我在小车上加了个电位计,方便调试合适的速度。
4、原来认为小车寻线要搞个白板,上面贴黑色,实际上对白色没有那高的要求,浅色即可,所以我选择了客厅的地板,地板瓷砖间的黑色细勾缝,影响不到小车寻线。
在家里边设计边实验设计寻线小车,花不了多少钱,但它的设计过程与真实工业项目的设计路径不是一样一样的吗!


