制作模型车的DIY爱好者会有这样的经验,你给小车左右两侧轮子的驱动电机同样的功率值,但两个轮子的转速可能是不一样,而且不同功率值下,两个轮子的转速差也不一样。当然如果两个轮子在行进过程中,分别遇到的阻力不一样时,两个轮子的转速也会发生偏差。这样的左右两轮转速不一致,就会反映在小车不能走直线上,这是让DIY爱好者头痛的事!
如果驱动轮子的电机安装了编码器,情况会如何?编码器这样的传感器是可以测量转速和转角的。如果把左右电机中编码器反馈的转速送入Arduino单片控制器中,计算机就会知道小车不能走直线的真正原因,并实时计算出两轮的转速差,然后可以设立一个PID算法,让转速慢轮子的电机功率值加大,从而消除车轮的转速差。这就是最简单的PID控制理论应用到实践中的一次尝试吧。
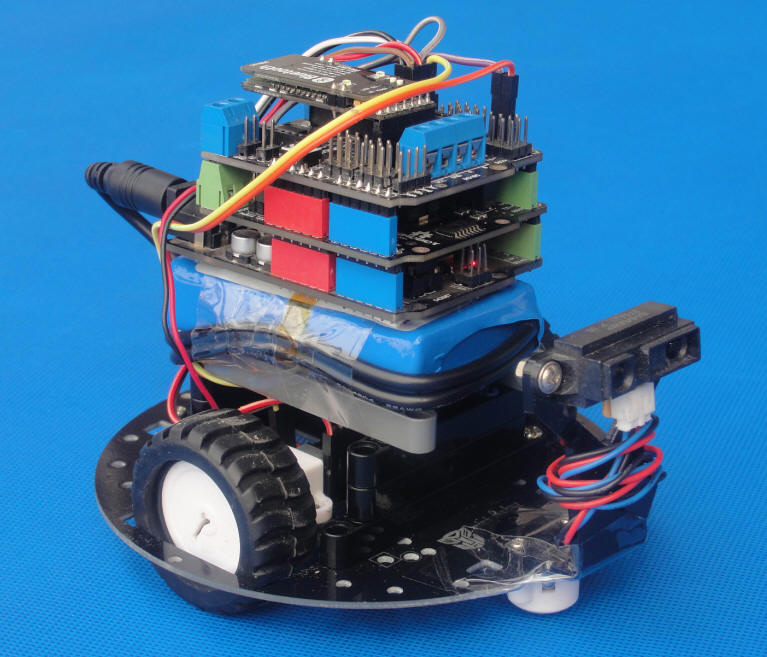
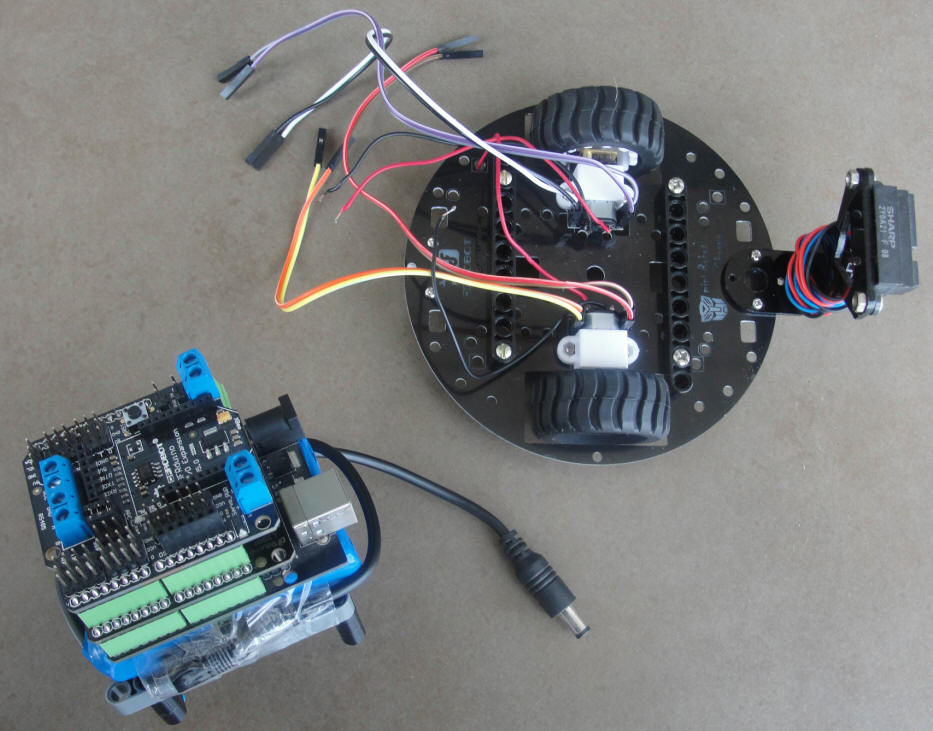
我们在大学学到了很多、甚至更高深的理论,但有机会实践这些理论的机会少之又少,其实制作DIY模型,就可以方便地去实践这些理论的。为这次的理论实践,我采用的模型是DFRobot公司出品的mini编码器小车,如下图。
图1 DFRobot编码器小车全景图
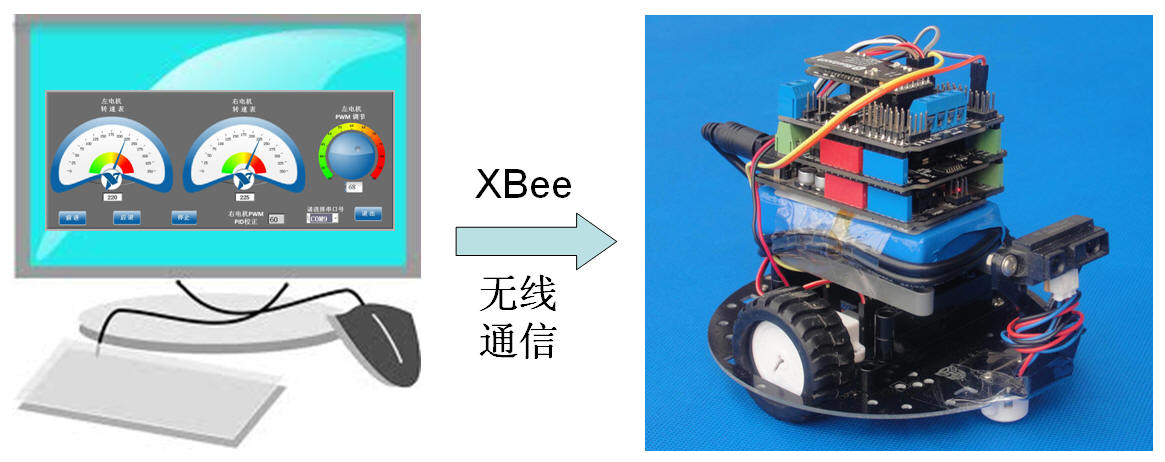
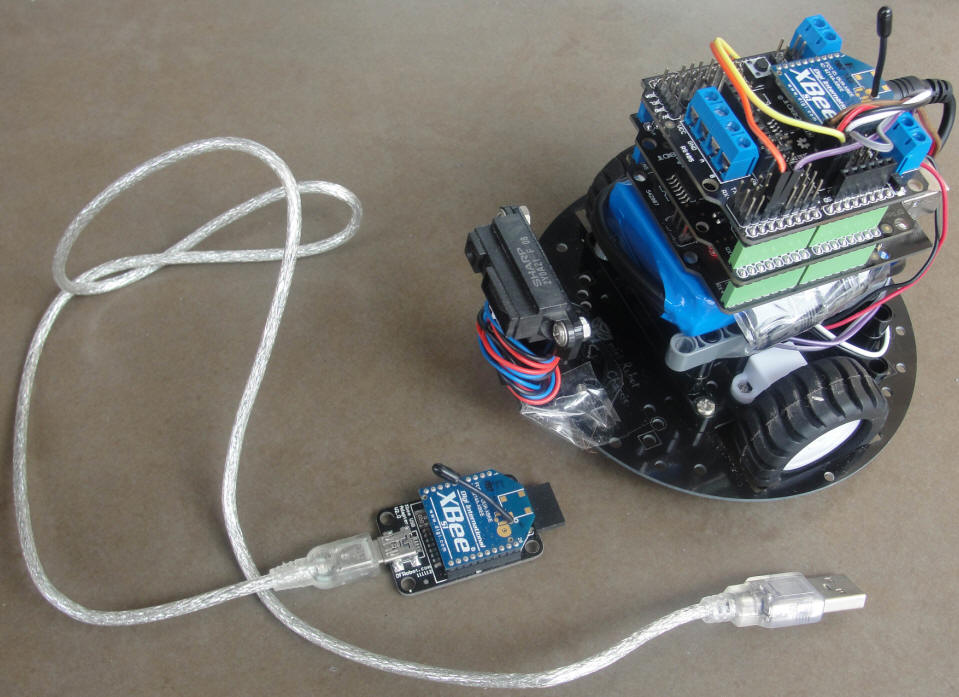
如何才能直观地看到小车左右车轮电机转速和功率值的变化以及PID比例调节的效果,小车上的Arduino单片机控制器是做不到这点的,我采用的是上位机LabVIEW制作的前面板作为人机交互的界面,来实现对它们的监控。Arduino控制器作为下位机,接受上位机的小车左电机功率值,并把左右电机的转速和PID调节后右电机的功率值反馈到上位机去显示出来。上下位机的串口通信采用了XBee 1mW Zigbee100米传输无线数传模块套装,目的是使USB有线通信变为无线通信模式。如图2所示。

图2编码器小车与PC机的XBee无线通信设备
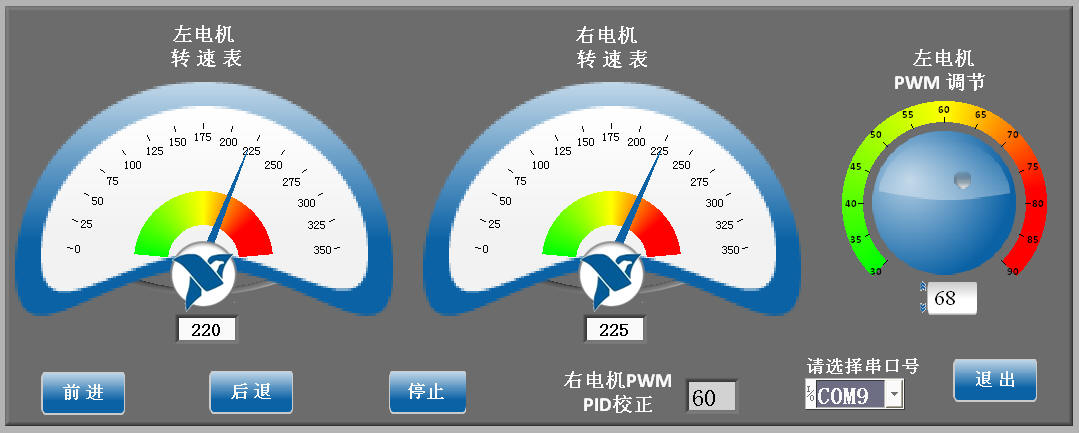
LabVIEW人机交互界面如下图所示,这个图是实验当时用截图软件截屏而得,可以看到,当左电机的PWM功率值为68时,PID调节后的右电机PWM功率值需为60,才能使左右电机转速一致。(注意:左右电机转速相差5,并不说明是转速不同,而是编码器的分辨率不够,因为这个小车编码器码盘的齿数只有12个。)

图3编码器小车左右转速同步的PID调节实验人机交互面板
PID算法放在下位机Arduino程序中,这个指令是:
val_right=(float)val_right+(rpm1-rpm2)*0.4;
式子中rpm1是左电机的转速;rpm2是右电机的转速;val_right是右电机的PWM功率值。左右电机的转速差乘以比例因子0.4叠加到上一次PID计算得到的val_right,就得到了当前右电机PWM功率值val_right。如果左电机转速rpm1比右电机转速rpm2要低,则从算式中可以看到,会自动减小右电机功率值val_right,通过循环执行Arduino程序中PID算式,以达到两电机转速一致的目的。
一个有趣的实验,可以边实验边观察。如果您拿起这个编码器小车,用手摩擦小车的左轮,左轮的转速变慢,在PID比例算式的作用下,右轮电机的PWM功率值会变小,以使右轮速度也跟着变慢。这时,再把手移到小车右轮,右轮遇到阻力时,为了保证依然与左轮转速同步,在LabVIEW前面板反馈的右电机PWM功率值,您会观察到它的值再不断增加。所以一个PID比例算法的功效,通过编码器小车这个物理设备和LabVIEW这个人机交互界面,就真真切切地感受到了。
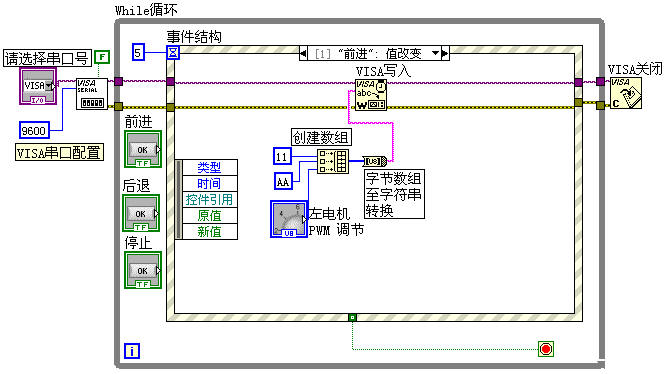
LabVIEW虚拟仪器程序由前面板和框图程序组成,前面板是人机交互的界面,界面上有用户输入和显示输出两类控件;框图程序则是用户编制的程序源代码,以定义和控制在前面板上的控件输入和输出功能。这个LabVIEW上位机程序用到了事件结构的编程技术,以响应前面板上的四个按钮,这个四个按钮分别为“前进”、“后退”、“停止”和“退出”。图4为框图程序的“前进”事件分支的程序截图。(双击图片,可以放大!)
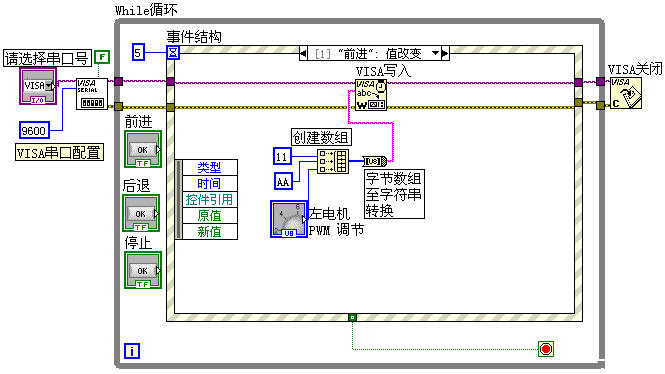
图4框图程序的“前进”事件分支
从图4看出,如果按下前面板的“前进”按钮,在后台程序中就会引发“前进”:值改变事件分支,这个分支程序的任务是先把三个字节数据转换为一个字符串,再输入到VISA写入VI中,这个VI就会通过RS322通信协议把三个字节下达给小车上的Arduino控制器。三个字节中第一个字节如果是0x11(十六进制),则表示小车启动,若是0x22,则小车停止;第二个字节决定小车前进或者后退,0xAA表示前进,0xBB表示后退;第三个字节是小车左电机的PWM功率值,功率值的大小由图3中旋钮控件来调节。图4是框图程序的“前进”事件分支,这三个字节的值,大家都看到了,再想想如果是按下“后退”或“停止”按钮,它们相应的事件分支中三个字节分别应为多少?
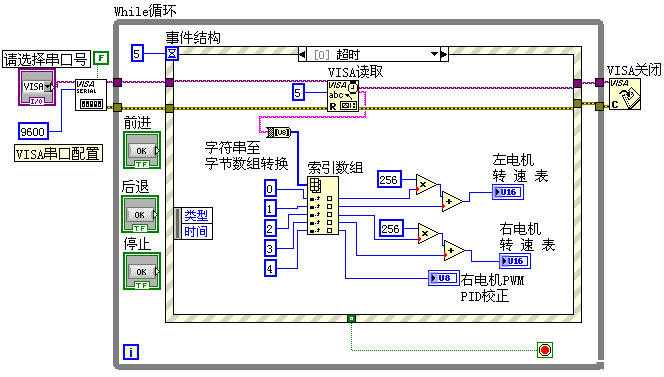
如果没有按钮按下事件,框图程序就会执行“超时”分支,如图5所示,在这个分支里,VISA读取VI循环读取Arduino下位机上传的5个字节字符串,利用“字符串至字节数组转换”VI和“索引数组”,把字符串变为5个字节的数据,从数组一个个取出来,数组的第0和1元素字节分别是左电机转速值的高、低字节,第2和3元素字节分别是右电机转速值的高、低字节。把高字节和低字节带入算式:高字节×256+低字节,就得到了电机的转速。数组的第5元素字节就是Arduino上传的PID校正后的右电机PWM功率值。
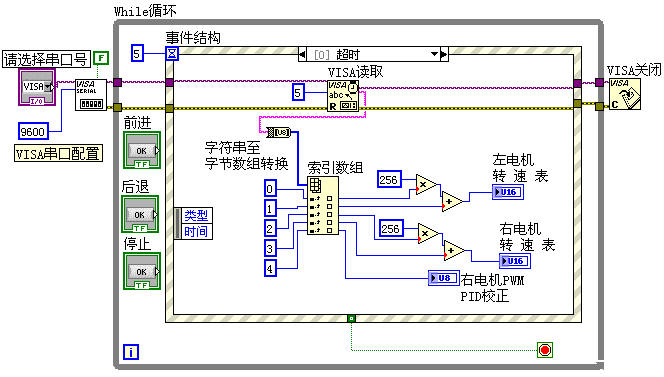
图5 框图程序的“超时”事件分支
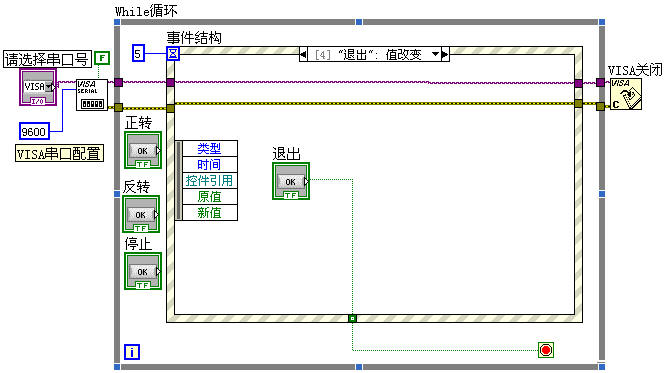
要退出一个包含事件结构的While循环,可以使用“退出”按钮,将其连线到While循环的条件端子,要特别注意的是,必须将“退出”按钮布尔控件放在事件结构中,并为“退出”按钮配置处理“值改变”事件的事件分支。如图6所示。如果“退出”按钮在事件结构外面,事件结构将一直等待,即使单击了“退出”按钮也无济于事。
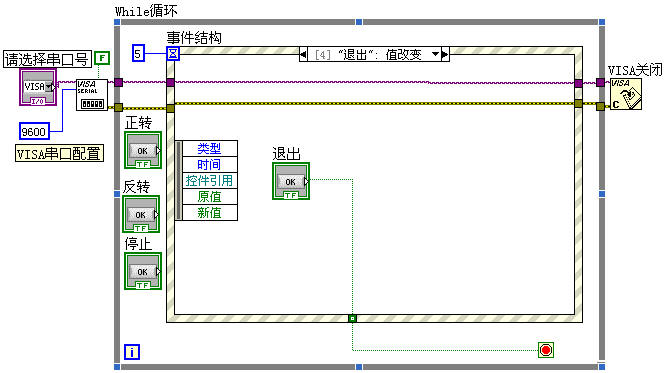
图6框图程序的“退出”事件分支
LabVIEW程序请下载:http://yunpan.cn/QeKeTEJiiTwEm (访问密码:64a5)
与上位机LabVIEW程序相配合的是在编码器小车上Arduino控制器的C程序。这个C程序的任务是:接受上位计算机的小车前进、后退、停止以及小车左电机功率设置字节指令,并通过L298P直流电机驱动板,驱动直流伺服电机按照上位机指令运行。采集左右两车轮的电机中编码器脉冲信号,并处理成电机转速信息,计算出两电机的转速差,根据转速差,进行PID比例调节以增大或减小右车轮电机功率值,从而达到左右车轮转速一致。然后把两车轮转速值和右轮电机功率值上传给上位机显示。
Arduino程序:
//定义变量程序段
//把小车左轮电机编码器码盘的OUTA信号连接到Arduino控制器的数字端口2,
//数字端口2是Arduino的外部中断0的端口。
#define PinA_left 2 //外部中断0
#define PinB_left 8 //小车左车轮电机编码器码盘的OUTB信号连接到数字端口8
//把小车右车轮电机编码器码盘的OUTA信号连接到Arduino控制器的数字端口3,
//数字端口3是Arduino的外部中断1的端口。
#define PinA_right 3 //外部中断1
#define PinB_right 9 //小车右车轮电机编码器码盘的OUTB信号连接到数字端口9
int E_left =5; //L298P直流电机驱动板的左轮电机使能端口连接到数字接口5
int M_left =4; //L298P直流电机驱动板的左轮电机转向端口连接到数字接口4
int E_right =6; //连接小车右轮电机的使能端口到数字接口6
int M_right =7; //连接小车右轮电机的转向端口到数字接口7
int val_right; //小车右轮电机的PWM功率值
int val_start;//上位机控制字节,用于控制电机是否启动;
int val_FB; //上位机控制字节,用于控制电机是正转还是反转;
int val_left;//上位机控制字节,用于提供给左轮电机PWM功率值。
int count1 = 0; //左轮编码器码盘脉冲计数值
int count2= 0; //右轮编码器码盘脉冲计数值
int rpm1 = 0; //左轮电机每分钟(min)转速(r/min)
int rpm2 = 0; //右轮电机每分钟(min)转速(r/min)
int rpm1_HIGH = 0;//左轮电机转速分解成高、低两个字节数据,以方便上传给PC机
int rpm1_LOW = 0;
int rpm2_HIGH = 0;//右轮电机转速分解成高、低两个字节数据
int rpm2_LOW = 0;
int flag;//设置小车行车状态,是前进、后退还是停止
unsigned long time = 0, old_time = 0; // 时间标记
unsigned long time1 = 0, time2 = 0; // 时间标记
//初始化程序段
void setup()
{
Serial.begin(9600); // 启动串口通信,波特率为9600b/s
pinMode(M_left, OUTPUT); //L298P直流电机驱动板的控制端口设置为输出模式
pinMode(E_left, OUTPUT);
pinMode(M_right, OUTPUT);
pinMode(E_right, OUTPUT);
pinMode(PinA_left,INPUT); //伺服电机编码器的OUTA和OUTB信号端设置为输入模式
pinMode(PinB_left,INPUT);
pinMode(PinA_right,INPUT);
pinMode(PinB_right,INPUT);
//定义外部中断0和1的中断子程序Code(),中断触发为下跳沿触发
//当编码器码盘的OUTA脉冲信号发生下跳沿中断时,
//将自动调用执行中断子程序Code()。
attachInterrupt(0, Code1, FALLING);//小车左车轮电机的编码器脉冲中断函数
attachInterrupt(1, Code2, FALLING);//小车右车轮电机的编码器脉冲中断函数
}
//子程序程序段
void advance()//小车前进
{
digitalWrite(M_left,HIGH);
analogWrite(E_left,val_left);
digitalWrite(M_right,LOW);
analogWrite(E_right,val_right);
}
void back()//小车后退
{
digitalWrite(M_left,LOW);
analogWrite(E_left,val_left);
digitalWrite(M_right,HIGH);
analogWrite(E_right,val_right);
}
void Stop()//小车停止
{
digitalWrite(E_right, LOW);
digitalWrite(E_left, LOW);
}
//主程序段
void loop()
{
if (Serial.available()>0) //如果Arduino控制器读缓冲区中存在上位机下达的字节
{
val_start= Serial.read(); //从读缓冲区中读取上位机的三个控制字节
delay(5);
val_FB = Serial.read();
delay(5);
val_left= Serial.read();
delay(5);
if(val_start==0x11) //如果读出的第一个字节为小车启动标志字节0x11
{
if(val_FB ==0xAA) //如果读出的第二个字节为小车前进标志字节0xAA
{
//读出的第三个字节为小车左车轮电机的PWM功率值,把它赋值给右车轮电机功率变量
val_right=val_left;
advance(); //小车前进
flag='a'; //设置小车前进标志字符
count1 = 0; //恢复到编码器测速的初始状态
count2 = 0;
old_time= millis();
}
else if(val_FB ==0xBB) //如果读出的第二个字节为小车后退标志字节0xBB
{
val_right=val_left;
back(); //小车后退
flag='b'; //设置小车后退标志字符
count1 = 0; //恢复到编码器测速的初始状态
count2 = 0;
old_time= millis();
}
}
else if(val_start==0x22) //如果读出的第一个字节为小车停止标志字节0x22
{
Stop(); //小车停止
flag='s'; //设置小车停止标志字符
}
}
time = millis();//以毫秒为单位,计算当前时间
//计算出每一秒钟编码器码盘计得的脉冲数,
if(abs(time - old_time) >= 1000) // 如果计时时间已达1秒
{
detachInterrupt(0); // 关闭外部中断0
detachInterrupt(1); // 关闭外部中断1
//把每一秒钟编码器码盘计得的脉冲数,换算为当前转速值
//转速单位是每分钟多少转,即r/min。这个编码器码盘为12个齿。
rpm1 =(float)count1*60/12;//小车左车轮电机转速
rpm2 =(float)count2*60/12; //小车右车轮电机转速
rpm1_HIGH=rpm1/256;//把转速值分解为高字节和低字节
rpm1_LOW=rpm1%256;
rpm2_HIGH=rpm2/256;
rpm2_LOW=rpm2%256;
//根据左右车轮转速差rpm1-rpm2,乘以比例因子0.4,获得比例调节后的右车轮电机PWM功率值
val_right=(float)val_right+(rpm1-rpm2)*0.4;
Serial.print(rpm1_HIGH,BYTE);//向上位计算机上传左车轮电机当前转速的高、低字节
Serial.print(rpm1_LOW,BYTE);
Serial.print(rpm2_HIGH,BYTE);//向上位计算机上传右车轮电机当前转速的高、低字节
Serial.print(rpm2_LOW,BYTE);
Serial.print(val_right,BYTE);// 向上位计算机上传PID调节后的右轮电机PWM功率值
if(flag=='a') //根据刚刚调节后的小车电机PWM功率值,及时修正小车前进或者后退状态
advance();
if(flag=='b')
back();
//恢复到编码器测速的初始状态
count1 = 0; //把脉冲计数值清零,以便计算下一秒的脉冲计数
count2 = 0;
old_time= millis(); // 记录每秒测速时的时间节点
attachInterrupt(0, Code1,FALLING); // 重新开放外部中断0
attachInterrupt(1, Code2,FALLING); // 重新开放外部中断1
}
}
// 左侧车轮电机的编码器码盘计数中断子程序
void Code1()
{
//为了不计入噪音干扰脉冲,
//当2次中断之间的时间大于5ms时,计一次有效计数
if((millis()-time1)>5)
//当编码器码盘的OUTA脉冲信号下跳沿每中断一次,
count1 += 1; // 编码器码盘计数加一
time1==millis();
}
// 右侧车轮电机的编码器码盘计数中断子程序
void Code2()
{
if((millis()-time2)>5)
//当编码器码盘的OUTA脉冲信号下跳沿每中断一次,
count2 += 1; // 编码器码盘计数加一
time2==millis();
}
最后看看两张图,一个是小车的安装图,另一张是小车用的锂电池。至于小车用到的DFRobot Mini Encoder Kit编码器套件的详细介绍,请看文章:
http://www.eefocus.com/zhang700309/blog/13-05/294304_fddf6.html
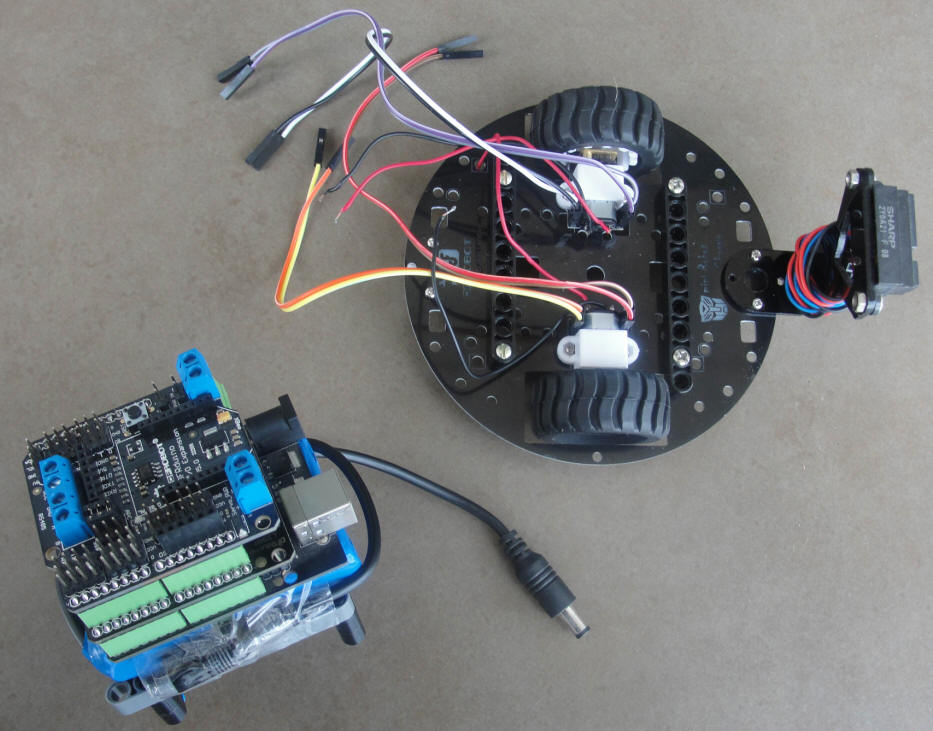
图7 编码器小车安装

图8 8.4V、3500mAh锂聚合物电池