SLAM��ǰ������ ��������˵����� | Ӳ��������
�������ߣ�����
2016-05-16 19:40
ר�⣺Ӳ��������
������������ĵ��飬�˽�SLAM������������˵����Ĺ��ڴ�ţ�����࣬���죬�����������ٸпƼ���CTO��һ������SLAM��ǰ����ʼ����
����8�£�����(����������(���ںţ�����)�����ںŹ�ע)�������ھٰ조ȫ���˹�����������˴��´�ᡱ��GAIR�����ڱ��δ���ϣ����ǽ��������˹������������Top25������ҵ���ٸпƼ��������ص��ע�Ĺ�˾֮һ�����죬�������뵽���ٸпƼ�CTO��һ����Ϊ��ҽ���SLAM������ǰ��������
��һ�����ٸпƼ�CTO����ҵ�ڱ������պ����ѧ��ʦ���й����Լ������������ר�ҷ����Ժʿ��������ϵ�����λϵͳ�о����顣�Ȱ��������з���ժ�ù���������Intel iot���������ɡ��廪���������ɵȴ��ͱ�����һ�����ٸпƼ�����������������չ��һ�����Ӿ�SLAMΪ���ģ���̽������������λ�����ϡ�·���滮Ϊһ��ij��컯��������Դ�����㷨��
SLAM��Ϊһ�ֻ���������������ľ�����;����DZͧ����λ������SLAM�ij��Σ������죬�Ѿ����������ǵ���Ұ����ȥ����ɨ�ػ����˵�ʢ�������������룬���ڻ�����ά�Ӿ���VSLAM������Խ��Խ�������������˲��ò���ע���������������ĵ��飬�˽���������������˵����Ĺ��ڴ�ţ�����࣬���죬�����������ٸпƼ���CTO����һ������SLAM��ǰ��������ʼ������ɨ���������е��ɻ�
��SLAM��ǰ��
��֮ǰ�ӱ��Ƶ��о�����һֱ�ڵ����붨λ����ѧϰ��һ��ʼƫ���ڸ߾��ȵĹ��Ե��������ǵ������ǹ��Ƶ�������ϵ��������ڶ�ʵ����Դ������ִ���������ʼ�о��Ӿ������е�SLAM�����봫ͳ�Ĺ�����������ϣ�ʵ�ֶ����豸������������λ��
��λ�������١���ʱ���������ǧ�궼δ����ȫ��������⣬�����ʱ����ֻ�ܿ�ҹ�������˾�������Ķ���ֱ��Ԫ�������ڶԶ�λ�����Ż�������й��˷���������̾Ϊ��ֹ��ǣ��������ǣ�ǰ��������ʵ��γ�ȹ��ơ�
1964������Ͷ��ʹ��GPS��ͻȻ�ʹ����˴�ҵ���Ϸ�����õ�P����Դﵽ1-2�����ȣ����Ÿ�����ʹ�õ�CA��Ҳ�ܹ�ʵ��5-10���ľ��ȡ�
�������һ����Ϊ��ͻ��P���������һ����Ϊ������ߵĶ�λ���˾��ȣ�����˺ܶ�ʮ�־��д�����뷨��ͦ��GPS�ľ��ȡ�����RTK��ʵʱ��λ��ּ�����������ʵ�����Ķ�λ���ȣ������Ͻ��������Ķ�λ�Ͷ������⡣
�����������������Ѱ���ˣ�Ϊ��ʵ�����ڵĶ�λ���ˣ�һ������������ӿ�֣����У�SLAM��������ӱ������SLAM��һ��ʮ�ֽ���ѧ�Ƶ��������ȴ����Ĵ���������
���벻�������ഫ����
Ŀǰ����SLAM�ϵ�Sensor��Ҫ�������࣬�����״������ͷ��

�������о���һЩ�������״�����������ͷ�������״��е��߶���֮�֣��Ƿֱ��ʼ�����Ҳ����ǧ�SICK��velodyne��Hokuyo�Լ����ڵı��ѹ�ѧ��Slamtech�DZȽ������ļ����״ﳧ�̡����ǿ�����ΪSLAM��һ��������ʽ��
���С��Ƶ��չʾ�ľ���һ�ּ�2D SLAM��
���С��Ƶ�DZ���Ľ���kumar�����ر�������һ��demo���������˻������ö�ά�����״�����SLAM��
��VSLAM����Ҫ������ͷ��ʵ�֣�����ͷƷ�ַ��࣬��Ҫ��Ϊ��Ŀ��˫Ŀ����Ŀ�ṹ�⡢˫Ŀ�ṹ�⡢ToF�����ࡣ���ǵĺ��Ķ��ǻ�ȡRGB��depth map(�����Ϣ)���ĵ�Ŀ��˫Ŀ��Zed��leapmotion�������ﲻ�������ͣ�����Ҫ����һ�½ṹ���ToF��
��������еĽṹ���TOF
�ṹ��ԭ������������ͨ�����м���Ͷ��������ѧ����Ԫ����DOE������������ͷ�������������

���ͼ����ͼ��ժ��primesense��ר����

��һҳ����������ʮ�ֹ��ɵ�ɢ����ɣ����ͬʱ�����������ã�������Խϸߡ�����˵DOE�ɱ�Ҳ�Ƚϸߡ�
����һ�ֱȽ϶��صķ��������һ��ͼ����������mems���ķ�ʽ������DLPͶӰ�ǣ������������е�Ƶ��ͨ���������ȥ�������ٸı�����̬����������ɨ�裬ʵ�ֽṹ���Ͷ�䡣������ST��ST��������һЩ�Ƚ��ŵĺڿƼ�����
ToF��time of flight��Ҳ��һ�ֺ���ǰ������Ȼ�ȡ������
���������������ƵĽ�����⣬��������䣬������ͨ��������߷���ͷ���ʱ������λ������㱻���㾰��ľ��룬�Բ��������Ϣ���������״��������һ������softkinetic��DS325���õľ���ToF������TI��Ƶģ����������Ľ������۽ṹ�Ƚ����⣬��2�����߸�����ţ���ps�����ʱ�������ĵ�λ���سߴ�ͨ����100um�ijߴ磬����Ŀǰ�ֱ��ʲ��ߡ��Ժ�Ҳ���в�����ǰ�������Ҿ��ò����ǵ߸��Եġ�
�ã������������ͼ֮���أ�SLAM�㷨�Ϳ�ʼ�����ˣ�����Sensor������IJ�ͬ��SLAM�ij�����ʽ���в��졣���¿��Է�Ϊ����SLAM��Ҳ��2D��3D�����Ӿ�SLAM��Ҳ��Sparse��semiDense��Dense�����࣬������Ҫ˼·��ͬС�졣
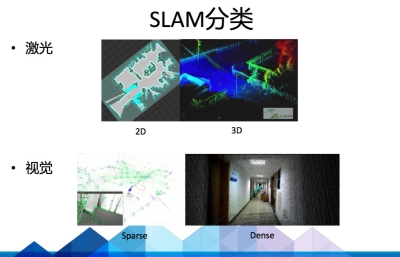
�����Sparse��ϡ�裩��
���ƫDense���ܼ�����

��SLAM�㷨ʵ�ֵ�4Ҫ��
SLAM�㷨��ʵ�ֵ�ʱ����ҪҪ��������4������ɣ�
1. ��ͼ��ʾ���⣬����dense��sparse�������IJ�ͬ���﷽ʽ�������Ҫ����ʵ�ʳ�������ȥ����
2. ��Ϣ��֪���⣬��Ҫ�������ȫ��ĸ�֪���������RGBD����ͷFOVͨ���Ƚ�С���������״�Ƚϴ�
3. ���ݹ������⣬��ͬ��sensor���������͡�ʱ���������ϵ���﷽ʽ���в�ͬ����Ҫͳһ����
4. ��λ�빹ͼ���⣬����ָ��ôʵ��λ�˹��ƺͽ�ģ���������漰���ܶ���ѧ���⣬����ģ�ͽ�����״̬���ƺ��Ż�
�����Ļ��лػ�������⣬̽�����⣨exploration�����Լ�������⣨kidnapping����

�����һ���Ƚ�������SLAM�㷨������ػ����ͺ�Ư���������������cuda��gpu����������Ҫ��ͦ�ߣ�Ч���������Ƚ��š�
����VSLAM�ٸ�����

�Ҵ�Ž�һ�ֱȽ����е�VSLAM������ܡ�
����SLAM��ſ��Է�Ϊǰ�˺ͺ�ˣ�ǰ���൱��VO���Ӿ���̼ƣ����о�֡��֮֡��任��ϵ��������ȡÿ֡ͼ�������㣬��������֡ͼ����������ƥ�䣬Ȼ������RANSACȥ����������Ȼ�����ƥ�䣬�õ�һ��pose��Ϣ��λ�ú���̬����ͬʱ��������IMU��Inertial measurement unit���Բ�����Ԫ���ṩ����̬��Ϣ�����˲��ں�
�������Ҫ�Ƕ�ǰ�˳���������Ż��������˲����ۣ�EKF��UKF��PF���������Ż�����TORO��G2O����������ͼ���Ż������յõ����ŵ�λ�˹��ơ�
�������ѵ�Ƚ϶࣬�漰������ѧ֪ʶҲ�Ƚ϶࣬�ܵ���˵����Ѿ�����������ͳ���˲���������ͼ�Ż�ȥ�ˡ�
��Ϊ�����˲������ۣ��˲����ȶ�����̫�죬�������ҪƵ�������EKF����չ�������˲�������PFѹ���ܴ�����ͼ��SLAM��ͨ����keyframe���ؼ�֡��Ϊ��������������ڵ�ͽڵ�֮�����Ա任��ϵ���������任�������ϵؽ��йؼ��ڵ��ά������֤ͼ���������ڱ�֤���ȵ�ͬʱ�������˼�������
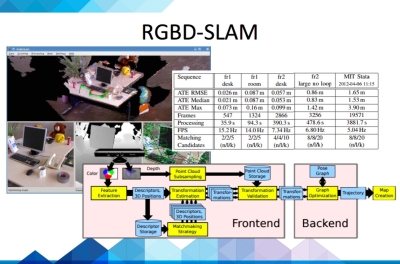
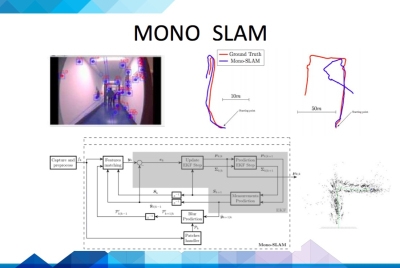
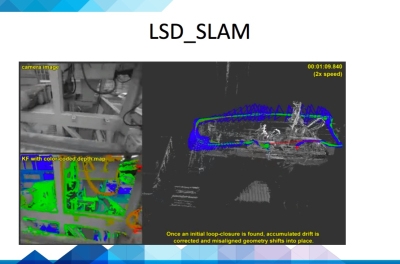
�оټ���Ŀǰ�Ƚ�������SLAM�㷨��PTAM,MonoSLAM, ORB-SLAM,RGBD-SLAM,RTAB-SLAM,LSD-SLAM��

���Դ�������ѧϰSLAM�Ļ���������У��ߵ��ز��Ǻܶ�ģ��������MIT��ETH����ۿƼ���ѧ���۹������ȵȶ��бȽϺõĴ�����Ʒ������һ���Ƚ���ǰ���ľ�����ά�Ļ����Ӿ�������˹�ٴ�ѧ��Ф���۽��ڽ��SLAM��Deep Learning��һЩ��ά����ķ����ʶ�� ʵ��һ���Գ����������Ļ����˸�֪���档
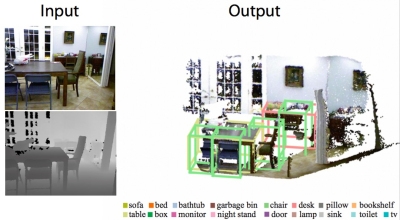
http://robots.princeton.edu/talks/2016_MIT/RobotPerception.pdf �������ǵ�չʾ��
�ܵ���˵��SLAM����������ľ�����;����DZͧ����λ������SLAM�ij��Σ������죬�Ѿ����������ǵ���Ұ��ɨ�ػ����˵�ʢ�и��������������롣ͬʱ������ά�Ӿ���VSLAMԽ��Խ���������ڵ���/���л����ˡ�VR/AR/MR������/AGV�Զ���ʻ��������õ�����ķ�չ��ͬʱҲ�����Խ��Խ���ϸ���г��ȴ��ھ�
�����occipital�Ŷӳ���һ����Ʒ���Ǹ�������˼��Ӧ�ã�������4000+�����һ����1000�������ɣ���Ȼ���Ǻܶ࣬����Ч��������pad���棩����Ҿӡ����˷��У���ʻ���������¡�3D��ӡ�������ֳ���¼������ʽ��Ϸ����ǿ��ʵ���̳����͡���Ƹ����������Ԯ����ҵ��ˮ�ߡ�GIS�ɼ��ȵȣ����ȴ���VSLAM����һչ��ͼ
��SLAM�Ľ�������������������
�ഫ�����ںϡ��Ż����ݹ�����ػ���⡢��ǰ���칹���������ɡ�����³���Ժ��ض�λ���ȶ���SLAM�����������ķ�չ������Щ�����������Ѵ̼��Ͳ�ҵ���ķ�չ����������ֻ��е�������һ�����ڲ��õĽ�����Ҳ�����Ѱ�����ռң��ı���������
����˵ʵ����SLAM��ȫ��������Ѽ��г��Ĺ����У�Ҳ�����һЩ���������⡣����Sensor���Ȳ��ߡ���������SensorӦ�ó��������������Եȵ����⡣
�ഫ�����ںϡ��Ż����ݹ�����ػ���⡢��ǰ���칹���������ɡ�����³���Ժ��ض�λ���ȶ���SLAM�����������ķ�չ������Щ�����������Ѵ̼��Ͳ�ҵ���ķ�չ����������ֻ��е�������һ�����ڲ��õĽ�����Ҳ�����Ѱ�����ռң��ı���������
�������״������ͷ���� SLAM ��ʽ����ʲô��ȱ���أ���û��һ���ۺϵķ�ʽ�������Ե�ȱ����أ���
�����״��ŵ��ǿ��ӷ�Χ�㣬����ȱ���Լ۱ȵͣ��ͳɱ����״�Ƿֱ��ʲ����ߣ�Ӱ�쵽��ģ���ȡ�vSLAM�Ļ�ȱ�����FOVͨ������50-60degree������������תʱ����������������еģ����ǹ�˾������vSLAM���״ﻹ��IMU����ϡ�
������Ŀǰ�����Ӿ���SLAM�ļ������ж��Ƕ��ʽϵͳ�����Ҫ����ʵʱ30fps���Dz���ֻ��Nvidia��оƬ��֧��cuda���ſ��ԣ���
��һ�����⣬��Ȼ�����Ӿ���SLAM��������Խϴ���Ƕ��ʽϵͳ���ǿ����������ģ�Sparse��SLAM���Դﵽ30-50hz��Ҳ����ҪGPU��Cuda�������dense�Ļ��ͱȽ�������Դ�����ݵ��ƻ������ǻ��ܶȿɵ���10��20hzҲ��û�����⡣
����һ��Ҫ��cuda��һЩ�õ�cuda��GPU���㷨��Ҫ����������SIFT��ICP���Լ��������ǻ���mesh�Ĺ��̣���ʹ����cuda���Բ�����������������ȡ��ƥ�����Ҳ�ǿ��Եġ�
�����һ������
������8�£������������ھٰ조ȫ���˹�����������˴��´�ᡱ����ƣ�GAIR�������˽��£����Ի����˵�δ��������ô������
�������ͱȽϴ��ˡ�
�����˲�ҵ�Ǹ��ܴ��Ecosystem����ʱ�����������ܲ�ҵ���������������Ѽ��г�ȱ�����㱬���Ȼ��Ҷ���̸���������ˣ����Ǻö˾��û�н���û�ʹ�㣬Ҳû��Ϊ�����˲�ҵ������ʲô��ֵ��
���Ǵ�ҿ��Կ����� ����ȱ����ɫ�ͻ����Ļ����˹�˾���ڱ���̭����ҵ���Խ��Խ�������ֹ������ƣ�һ����ϸ���г��ɳ�������
�ӻ����˵ĸ�֪������˵������������������ǰ�˴�����Ŀǰ��sensorǰ�˴�������̫�٣�����CPU����˺ܴ�ĸ��������ഫ�����ں���һ���ܴ�������㡣
�����˹�����Ҳ��ʼ��ͷ�����ѧϰ��������ר�õķֲ�ʽ�칹����������Э��������Ϊ���������Ҹ��˺�ϣ�������й�˾�ܰ�������á�
Ҳ�кöഴҵ��˾���ײ㹤�ձ�������رȵ�����������ܶȵ�ء����ϲ��ϣ����Ǻͻ����˲�ҵ�ĶԽӣ�Ҳ����ٻ�������ҵ�ķ�չ��������������̬�ܹ���Խ��Խ��������Ӳ���㵽�㷨�㵽���ܲ㵽SDK �ٵ�Ӧ�ò㣬ÿһ��ϸ�������й�˾���룬������Щ��ҵ�ڵ�����ƣ��ܿ�����������ҵ��ǰ�����Ǻܰ��ģ����Ų���֮��ͻ�ӭ�����Ȼ�������ָ��ʽ������