3D打印机各式各样,有方形的,也有三角形的,为什么这些3D打印机外形区别这么大?
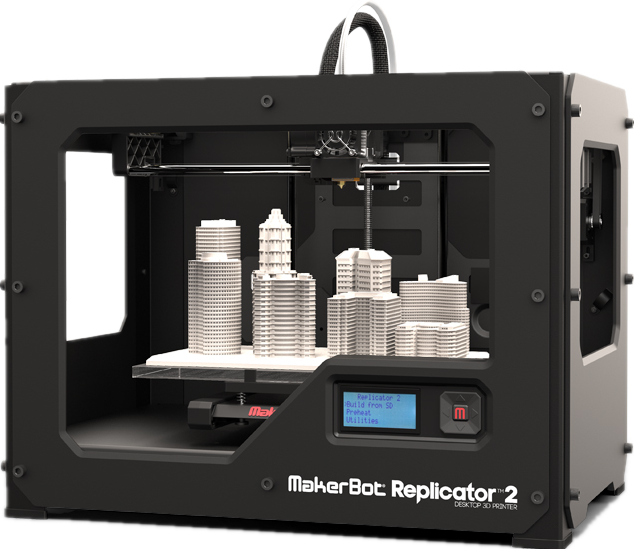
3D打印机外形的不同源于打印机的结构类型。根据运动结构的不动,3D打印机可以大致分为XYZ、Hbot、Delta、极坐标等。XYZ型的3D打印机大都采用笛卡尔坐标的运动结构,即X、Y、Z三轴互相垂直,每一个方向都由一个单独的电机控制,互不干扰。XY轴分别由一根单独的皮带传动,Z轴则基本采用滚珠丝杠的传动方式。典型的有Makerbot Replicator2打印机。
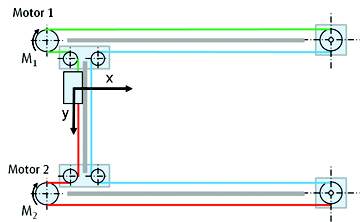
Hbot与XYZ最大的不同在于XY轴电机固定不动,解决了X轴电机随Y轴一起运动的问题,减小了Y轴的惯性,提高了速度。X、Y每一个方向的运动都由两个电机共同控制。Makerbot的五代机型都采用了这种运动控制方式。

Delta结构3D打印机便是常见的三角形机器,它以三组并联臂代替XYZ轴,三组电机协同控制,通过特定算法实现空间中的精确定位。这种机器速度快,但是由于结构原因外形一般比较高,成型尺寸较小。远端挤出可能会带来吐丝不畅的问题。不过打印过程会让人耳目一新。

极坐标是最不常见的机型,这类3D打印机的运动控制算法采用的是极坐标的映射关系。占用空间小,打印尺寸不会太大。但是在打印壳状物体时速度上会有明显的优势,自华3D不久将会推出这类机型。
