细解“水下滑翔机”的原理、优缺点、用处及其被精确定位技术方式
2017-04-04 悟文汇粹
1、“水下滑翔机”的基本原理

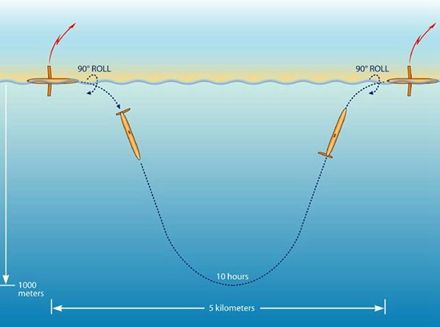
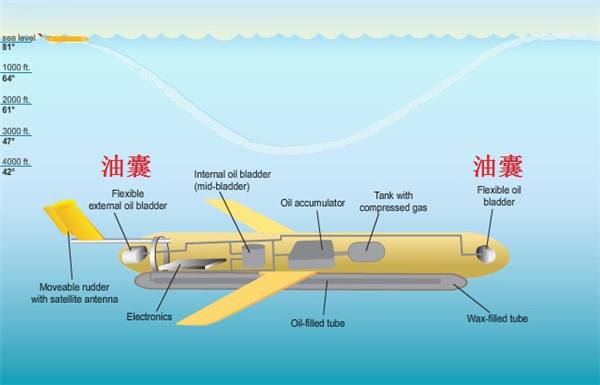
“水下滑翔机”的原理其实并不复杂。它的基本原理是:设法让一个“船体”在水中沉浮运动,然后通过一对“机翼”和“尾翼”控制“船体”的姿态,从而将沉浮运动变成向前运动,就和滑翔机利用气流滑翔一样。而“船体”之所以能在水中沉浮运动,是采用类似鱼鳔的原理。在“水下滑翔机”内,有两个类似鱼鳔的囊体,其中灌注轻于水的工质(实现热能和机械能相互转化的媒介物质称为工质,可能是气体,也可能是液体),两个囊体中有一个较软,随着工质的灌入,其体积发生明显的膨胀:而另一个则较硬,能承受一定压力,在灌入工质的时候基本不膨胀。这样,当工质流入较软囊体的时候,“水下滑翔机”的总比重就会明显轻于水,开始上浮,反之,则下沉。

早期的“水下滑翔机”采用的是电驱动,只需很少的电力,就可以在水中一沉一浮地向前游动,也可以在一定深度的海水中悬浮。这样的“水下滑翔机”能在水中航行几个月,并在每次浮上水面时,利用无线电天线发出自己搜集的水文信息。2009年,美国罗格斯大学研制的“水下滑翔机”创造了一次充电成功横渡大西洋的纪录,航行时间长达七个月。可见,“水下滑翔机”的水下活动时间确实令人惊叹。
后来,人们又发明了利用不同深度温差实现“无限续航”的新原理。这种“水下滑翔机”使用一种热敏工质,这种工质在较冷的深海中会凝同,在较热的上层海水中会熔化。“水下滑翔机”通过一组阀门控制工质来回流动。采用这样的技术后,“水下滑翔机”用电量更少,可进一步提升其续航能力。从理论上来说,美国韦伯科技公司的“温差滑翔器”(一种“水下滑翔机”)甚至可以实现环球航行,或在海上连续航行数年。
上面提到的温差驱动技术,需要两种海水有较大的温差才能工作,因此,“水下滑翔机”只能潜入超过1000米深的海中工作。而天津大学提出的新型技术则利用温差发电,实现电力/温差混合驱动,从而解决温差式“水下滑翔机”难以在浅海工作的缺陷。总体而言,只要解决了自动化控制和机械可靠性问题,“水下滑翔机”所运用的技术还是相对简单的,并不存在需要对外国“水下滑翔机”拆解研究才能突破的瓶颈。
实际上,我国早已研制成功多种“水下滑翔机”。根据公开报道,中科院沈阳自动化研究所在2003年便开始研制“水下滑翔机”,2008年研制成功“水下滑翔机”样机。2011年7月,“科学一号”考察船携带“水下滑翔机”前往西太平洋进行综合科学试验,其间国产“水下滑翔机”下潜深度超过1000米。此后,又有相关报道提到,中国国内研制的“水下滑翔机”最大下潜深度已超过6000米。显然,与美军使用的“水下滑翔机”相比,国产“水下滑翔机”不仅毫不逊色,反而在部分性能上有所超越。
2、“水下滑翔机”的优点和缺点
“水下滑翔机”的优点:
首先,由于具备极长的续航能力,且能从水面一直潜入数千米深的海底,因此“水下滑翔机”能进行大范围的水文探测。如果多个“水下滑翔机”按照一定的规划编队航行,甚至能画出它所探测海域的水温情况、盐度情况、水声特性、海洋生物活动情况的测绘图来。

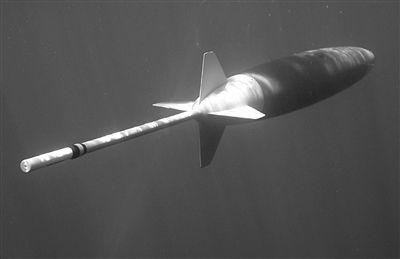
此外,由于“水下滑翔机”尺寸较小,且基本没有噪声,对传统探测手段而言,它几乎是隐形的,因此,在军事测绘领域有着不错的应用前景。而较为简单的结构和价格,也使得这种无人航行器可以作为消耗品使用。
“水下滑翔机”的缺点:
其速度极慢,最快航速也超不过一节/小时,在水下只能做锯齿形和螺旋回转轨迹的航行,因此航迹控制和定位精度较低。
如果在风浪较大的海面上停留,还会被水流冲走,失去控制。
此外,由于尺寸过小,且没有多少电力,“水下滑翔机”无法装备大型仪器设备,不能用来取代现有诸如拖曳声呐之类的探潜手段。
目前,美军已经立项研发大型“水下滑翔机”,希望扩大其航行和承载能力,如果研制成功,其用途范围或可扩展到排雷,乃至携带攻击性武器方面。
3、“水下滑翔机”的用处
限于自身性能特点,目前的“水下滑翔机”主要应用于海洋环境立体监测系统,提供详细海洋环境信息,提高海洋环境监测能力。作为水下传感网络的一个移动网络节点,“水下滑翔机”成为水下传感器网的重要组成部分。也就是说,目前“水下滑翔机”的最主要任务,依然是进行海洋环境监测,尤其是进行水文环境测绘。水文环境测绘虽然看起来似乎是一项“人畜无害”的活动,但实际上,这恰恰是对于现代潜艇作战具有重大意义的基础性工作。为什么这么说呢?
大家都知道,现代潜艇主要通过声呐来探测敌方目标,而反潜作战也主要通过声呐来搜寻敌方潜艇。不过,声波在水中传播的时候,会受到很多因素影响。例如,因为海流、海底地貌等因素,不同深度的海水温度、盐度的变化并不是连续的,在一些特定深度会出现“断层”,即温度或盐度突然发生变化,在“断层”下发出的声波在撞上“断层”后会被反射、折射,这样一来,在“断层”上方的监听者就无法接收到“断层”下方的声波。反过来,如果让拖曳变深声呐或潜艇潜到“断层”下方,反而能听到“断层”下方更远处传来的声波。这种“断层”,就是我们常说的水声跃层。打个形象的比喻:看似漆黑一片的深海,在声呐探测系统面前就像充满了回廊、镜子、影壁的一大片迷宫。
冷战期间,美苏竞相研制下潜深度更大的潜艇,苏联研制的945型核潜艇(塞拉级)在这方面走得最远,其潜深可达750米。美国海狼级核潜艇的潜深也达到600米以上。而研制潜深如此惊人的潜艇,除了让敌方普通的反潜鱼雷难以攻击外,也是为了最大限度利用深海中更加复杂的水声跃层,提高潜艇的隐蔽性,增加对方的探测难度。
反过来看,拖曳变深声呐,则是利用“断层”大幅度增加对潜艇探测距离的装备。现代变深声呐的工作深度最大已达1000米,对潜艇的探测距离也可达100海里以上。然而,由于深海中存在海底反射因素,在深海可以从更远距离上发现水面声源,这也成为潜艇远距离发现水面舰艇的天然优势。
不过,如果想利用水声跃层来隐蔽或增加探测距离,必须对水中跃层的位置、深度等因素有深入的了解,在战时“临时抱佛脚”去寻找水声跃层显然是不现实的,这就需要平时的探测积累。
除水声跃层外,海底地形也是影响潜艇作战的一个重要因素。对潜艇来说,在贴近海底的深度航行的时候,具有很大危险性。虽然潜艇可以利用高频主动声呐对海底进行绘图,但这既容易暴露自身,又因为绘图过于缓慢,无法满足安全需求。
长期以来,不乏潜艇因为误判海底地形撞上海山导致严重受损,乃至酿成艇毁人亡的事故。最典型的例子发生在2005年,当时,美国洛杉矶级核潜艇“旧金山”号在南太平洋海底200米左右的深度高速航行时触礁,或者说撞上了海底山脉,事故造成一人死亡,98人受伤,潜艇艇艏严重受损,后来不得不整体更换。
事后,据媒体透露,该艇出事的主要原因是航行时使用的是1989年的海图。这份海图上没有标示任何水下礁石、山体等障碍物。而这份海图上的标示内容本身,则是根据日本上世纪60年代的海洋调查结果绘制的。
显然,对于特定海区的水下地形和水文情况了解得越多,自然就能为己方潜艇绘制出一幅更精细的“地图”。此外,与地图不同,标示水声跃层等要素的海图“有效期”更短,不管是海底地质变化,还是洋流的变化,乃至海洋生物活动变化等都会造成特定海区水文特征较明显的变化,别说是10年、20年前绘制的海洋水文图谱,就算是几个月前绘制的,也不能保证精确。这也就是为什么和平时期各国都会经常在本国邻近海域进行详细的水文测绘。同时,这种长期水文测绘积累的数据,也有利于进行“海洋水文预报”,在一定程度上预测海底可能发生的变化。
根据美国海军官方网站的说法,2004年,美军在“环太平洋”演习中首次试验了“水下滑翔机”。同年,美军进行了一次代号为TASWEX-04的反潜演习,目的是试验用“水下滑翔机”进行反潜作战。2010年,美军开始采购“水下滑翔机”进行进一步试验。2013年夏季,美军正式将“水下滑翔机”的收放作业列入海军的常规训练课目。2014年,美军宣布将“水下滑翔机”部署到南海。
4、对“水下滑翔机”进行精确定位的技术方式
其一,利用高频主动声呐搜索就是一个比较可行的办法。冷战时期,美、英、苏核潜艇的指挥台围壳上就装有高频主动声呐,用于在北极冰层下航行时测绘水下冰层形状,寻找可以破冰而出的地点。不过,高频主动声呐的精度虽高,探测距离却不远。因此,在对方投放或回收“水下滑翔机”的阶段,就成了捕捉目标的重要窗口。这也就解释了,为何2016年捞走美国“水下滑翔机”的中国海军救捞船要贴近到距美国间谍船500米左右的距离。
其二,蓝绿激光探测系统,也具备发现“水下滑翔机”的可能。该系统实际上是一种激光雷达系统,工作在海水中传播特性较好的蓝绿激光波段,具有较高的探测精度。目前,美国已将类似设备安装在直升机上用于扫雷。
其三,使用受过训练的海洋生物,也可以在一定范围内发现“水下滑翔机”。目前,美国、俄罗斯等国都有训练海豚、海豹等海洋生物进行扫雷、反蛙人等特种作战的尝试。由于“水下滑翔机”本身航速很慢,海洋生物能有效对其进行追踪。许多“水下滑翔机”在长距离航行后,被发现有鲨鱼啃咬过的痕迹,也有的被海洋生物直接咬坏沉没。这些情况表明,经过训练的海洋生物可能是一种对付“水下滑翔机”的有效手段。
尽管“水下滑翔机”在水下很难被发现,但它每次完成一个浮沉循环,就会浮上水面发出无线电信号,传回搜集的情报、进行GPS导航定位校正自身航向。这时,它极易暴露自己的位置,由于其航速极低,只要发现其位置后跟踪打捞,就不难将其完整“擒获”。
文章来源:世界军事;席亚洲 。
http://portal.oichina.com.cn/oiweb_proView.htm?userid=47&proId=501
AUG
AUG-水下滑翔器
Company / 所属公司: Tianjin Deepfar Ocean Technology Co., Ltd. / 天津深之蓝海洋设备科技有限公司
Booth No. / 展位号:A75
Product Categories / 产品类别: Autonomous Underwater Vehicles/自主水下航行器
Time to Market / 上市时间: No information / 暂无信息
Product Description / 产品简介:
海洋剖面测量水下滑翔机作为公司一款重要的水下自主机器人,主要依靠浮力驱动以锯齿形轨迹在海洋中前进。利用其效率高的特点,水下滑翔机可以进行大航程、长时间的海洋剖面运动。主要适用于海域的温跃层的温度、盐度、水质等海洋环境数据收集。该款滑翔机除搭载水听器、CTD科学传感器获得全方位的海洋环境数据外,其中间舱段为模块化设计,可以根据客户兴趣,定制加装传感器设备,满足客户对其特定海洋信息测量的需求。
Contacts 联系方式
Company Name / 公司名称 : Tianjin Deepfar Ocean Technology Co., Ltd. / 天津深之蓝海洋设备科技有限公司
Country or Region / 国家或地区:China/中国
Addr / 地址:Muning Road 45, TEDA, Tianjin, China
天津市开发区睦宁路45号津滨发展7号厂房
Tel / 电话:86-22-59860762
Fax / 传真:86-22-59860759
Email / 邮箱:300457
Web / 网站:www.deepinfar.com