IGRIP是成立于1985年的美国Deneb Robotics公司推出的交互式机器人图形编程与仿真软件包。IGRIP是Interactive Graphic Robot InstructionProgram的缩写。这是一种双向操作的软件,显示三维图象IGRIP和ULTRA产品是专业机器人模拟软件,它应用于机器人的设计,评估以及机器人离线编程等。通过将机器人,周边设备,机器人运动,机构运动及I/O输出入逻辑等因素融合为一体,IGRIP和ULTRA产品能生成精确的模拟及相关程序输出、优化机器人在车间的布置、运转和循环时间等,减少机器人与周边设备及环境之间可能产生的碰撞,这些都将大大减少设备成本以及机器人程序的调整时间。

Dassault Systemes(达索系统集团)于1996年在上市,1997年收购了Deneb公司和SolidWorks公司。2000年6月,达索公司整合旗下Deneb,Delta和Safework三家软件公司组成美国DELMIA公司。DELMIA名称取自DigitalEnterprise Lean Manufacturing Interactive Application,寓意数字企业精益制造交互式应用。提供了以生产工艺过程为中心的最全面的数字制造方式与解决方案。可全面满足制造业中按订单生产和精益生产等分布式敏捷制造系统的数字仿真需求。
Delmia分为Deneb和Version两个部分。其中,Version是可以与Catia完全无缝连接的模块系统,有着与Catia相同的操作方式与系统界面,而Deneb则是相对独立的系统模块,操作方式与系统界面与Catia之间有着很大的差异。两者之间的数据可以相互的使用,但并不能进行直接的转换,两者的数据转化需要一定的操作与修改。Delmia软件秉承了DenebRobotics公司软件的优异仿真性能,其主要的模块包括:
ENVISION:集成虚拟样机及虚拟制造交互式仿真环境、虚拟现实应用软件
IGRIP/Ultra系列:机器人应用设计、布局仿真及离线编程软件
QUEST:虚拟工厂及离散事件仿真软件
VIRTUAL NC:虚拟数控加工仿真软件
Deneb/ERGO:人体运动仿真与工效分析模块
Deneb/ASSEMBLY:装配路径规划仿真模块
其中,Ultra系列如其名所表示,为机器人控制,弧焊,点焊和喷涂的专业模拟。而IGRIP则是对机器人的控制,并可以使用机器人语言进行良好的离线编程。QUEST则能够对队列进行仿真模拟。VIRTUAL NC的功能是对机床的加工过程仿真模拟。
1 软件安装
DELMIA V5R20是达索公司推出的,该软件可以在网上下载到,找不到的可以给我们留言。详细安装方式见安装说明。
2 使用说明
2.1 使用前的说明
我们可以把DELMIA简单理解成是CATIA的扩展,只是在CATIA上增加了一个仿真模块,而CATIA类似与SolidWorks软件,属于设计范畴的三维CAD软件。在网络和书店没有任何的DELMIA资料的情况下,我们可以通过学习CATIA来了解DELMIA的基本操作和建模思路等。
下载的DELMIA V5R16软件内没有帮助文档,该文档有四张光盘的内容,当目前为止一直无法下载到。目前,需要掌握DELMIA的前提是必须参考该帮助文档。

图2 操作界面
在操作上有一些不同点,在主窗口中操作模型的规则为:
按住鼠标中键移动为平移;
按住Ctrl +鼠标中键,往上移动为放大,往下移动为放大;
按住鼠标中键+鼠标右键为旋转。
2.2 创建工作零件
一般情况下,目标路径可以在工作零件上取轮廓线得到,下面先讲解工作零件的创建。
DELMIA拥有强大的建模功能,这有别于其他任何机器人仿真软件。操作方法:[开始]―[机械设计] ―Part Design,进入零件设计模块。

零件设计的建模思路与SolidWorks类似,设计好后保存的文件格式为CATPart。

图4零件设计
2.3 Device Building
操作方法:[开始]―[资源模拟] ―DeviceBuilding,进入Device Building模块。
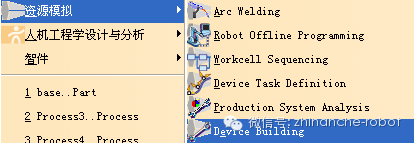
图5 进入Device Building
导入刚才设计的工作零件,另存为CATProduct类型文件。
2.4 现场布局
操作方法:[开始]―[资源模拟] ―Device Task Definition,进入Device TaskDefinition模块。

图6 进入Device Task Definition
导入上一步中的CATProduct文件,再导入机器人,
在下列工具栏中点击
图标,弹出“库(catalog)浏览器”对话框,选择其中一款机型。将鼠标移动到主窗口中,左击鼠标确定放置的位置。
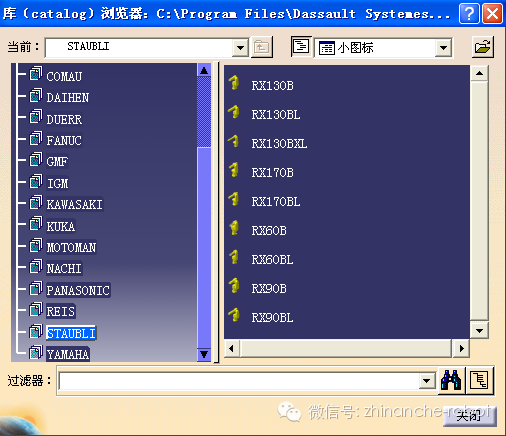
图8 “库(catalog)浏览器”对话框
再导入工具(比如焊枪),方法与导入机器人相同。

图9 现场布局
接下来需要将工具安装到机器人末端,点击 Set
Tool设置工具图标,弹出“RobotDressup”对话框,点选机器人设置Robot信息,点选工具设置Device信息。

图10 机器人管理工具栏

图11 安装工具的设置窗口
2.5 机器人编程
图12是Sequence工具栏,点击图标(New Robot Task),再点选机器人创建新的路径,机器人浏览目录下增加了Program一项。

图12 Sequene工具栏

图13工具菜单窗口
在Sequence工具栏上点击
图标,再点击机器人浏览目录下Program中的RobotTask.1,弹出Define Follow Path Activity对话框,点选目标路径的轮廓,根据设置的目标点间距来计算生成全部的目标点,Finish完成目标路径的生成。

2.6 模拟程序(仿真运行)
模拟程序是指在虚拟控制器上运行程序,如同在真实的控制器上运行一样。它是最完整的测试。借助该测试,可以了解机器人如何通过事件和I/O信号与外部设备进行交互。
图6是Simulation工具栏,点击
图标(RobotTask Simulation),再点击机器人浏览目录下Program中的RobotTask.1,弹出Process
Simulation和Simulation Control Tool工具栏,点击 图标,即能模拟运行。
图标,即能模拟运行。

图15 仿真工具栏


图16 Process Simulation和Simulation Control Tool工具栏
路径中各个目标点可以进行调整,也可以增加和删除目标点。
2.7 导出程序(离线编程)
操作方法:[开始]―[资源模拟] ―RobotOffline Programming,进入Robot Offline Programming模块。

图17 进入OLP离线编程模块
在Robot Offline Programming模块中使用离线编程需要安装Java 2 SDK,版本在1.4.1以上,其作用是采用Java将DELMIA的XML文件转换成机器人语言。目前语句转换的Java格式存在一点小的问题,针对一些品牌的机型,程序无法下载到机器人控制器中运行,需要进行局部手动修改或用机器人厂家专用的DELMIA结构软件转换。

图18 OLP离线编程窗口
图19是OfflineProgramming工具栏,点击 图标(Create RobotProgram),再点击机器人浏览目录下Program中的RobotTask.1,弹出Downloading
图标(Create RobotProgram),再点击机器人浏览目录下Program中的RobotTask.1,弹出Downloading
Options对话框,点击确定,即能生成模拟运行。
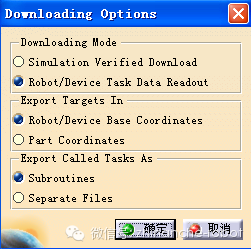
图19Downloading Options对话框
导出的程序文件见图10所示。信息内容不是很全面,只有末端工具的六个参数,也是属于“末端执行器级”的编程语言。(备注:由于我们用的是寻线命令,DELMIA能翻译的只有ABB、FUNAC两个引擎,其他的机型不行。)

图20程序文件
在窗口底部“Change Downloader”栏中可以切换其他机器人厂家的引擎。