高科技:分布式控制飞行器
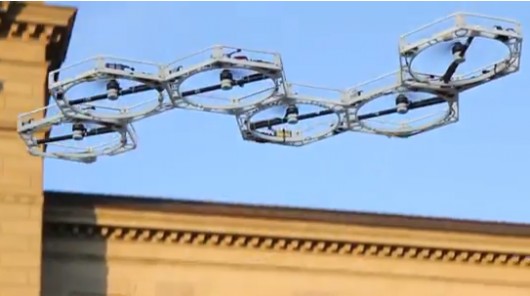
还记得之前发的那篇蜂群式飞行器的文章吗?这次的组合式飞行器也是同样重量级的研究成果。这种组合式飞行器可以由几个乃至几十个六边形飞行单元组合而成,做成形状不定、另类的多旋翼飞行筏。这项研究最突出的部分在于组合的整体不由单独一个CPU来处理飞行数据,而是和蜂群式飞行器一样,由每个单元的处理器来控制飞行。这项科技也被称为分布式飞行阵列。
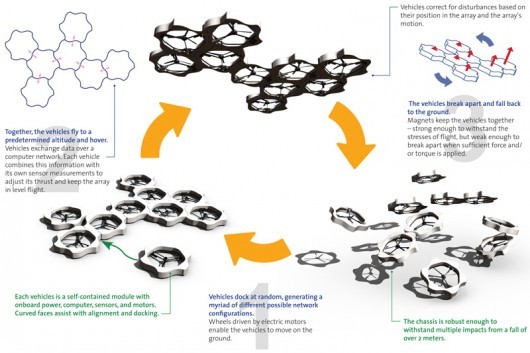
这个阵列由若干个地面上的单元组成,每个单元有三个全方向轮子,让它们能够自由移动。根据程序设定,这些单元会聚集在一起,比如说一个光亮的场地。接着一个处于中心位置的单元开始旋转,其他单元围绕着中心做皮鲁埃特旋转。然后各个单元会接驳成一个整体,通过红外线互相传输数据。
当一个区域内所有单元都接驳在一起之后,所有的感应器会进行校对,这期间没什么动静。接下来就是见证奇迹的时候了,所有的单元旋翼都启动,飞向空中。一半的旋翼是顺时针的,一半的旋翼是逆时针的,互相抵消力矩。

飞起来之后,每个单元单独用类似于iPhone上的速度感应设备来感应速度和倾斜,再微调旋翼的速度来实现整个组合的悬停。通过红外线数据传输来决定中心轴和移动方向。达到预定高度之后,全部单元在空中解散。因为单旋翼无法实现飞行,所以这些飞行器又全部回到地面,再重新选定中心来组合成一个随机的整体。
分布式控制的应用非常广泛。它的创造者D’Andrea博士还创造了提高亚马逊仓库效率的机器人Kiva Robotics。一大堆机器人进进出出,把货物送到装箱人的手中,再把架子放回仓库。拿的频繁的货物则会放在靠出口进的位置,不频繁的货物则会放在仓库角落。这样极大提高了仓库效率。
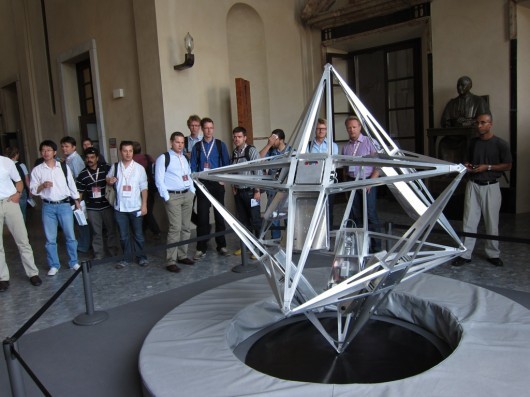
另外一个例子则是这个多边形。它每个部分都会调整重心,保证整体的重心,所以上图这个玩意永远也不会倒。
分布式控制并不是什么神话,在大自然中也非常常见。比如说蜜蜂或者蚂蚁的分工,保证了整个系统的正常运营。这个原理运用到蜂群式机器人中,未来的发展空间非常大。