Arduino 控制舵机
舵机是一种位置伺服的驱动器,主要是由外壳、电路板、无核心马达、齿轮与位置检测器所构成。其工作原理是由接收机或者单片机发出信号给舵机,其内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。经由电路板上的IC判断转动方向,再驱动无核心马达开始转动,透过减速齿轮将动力传至摆臂,同时由位置检测器送回信号,判断是否已经到达定位。适用于那些需要角度不断变化并可以保持的控制系统。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。一般舵机旋转的角度范围是0°到180°度。

舵机有很多规格,但所有的舵机都有外接三根线,分别用棕、红、橙三种颜色进行区分,由于舵机品牌不同,颜色也会有所差异,棕色为接地线,红色为电源正极线,橙色为信号线。

舵机的转动的角度是通过调节PWM(脉冲宽度调制)信号的占空比来实现的,标准PWM(脉冲宽度调制)信号的周期固定为20ms(50Hz),理论上脉宽分布应在1ms到2ms之间,但是,事实上脉宽可由0.5ms到2.5ms之间,脉宽和舵机的转角0°~180°相对应。有一点值得注意的地方,由于舵机牌子不同,对于同一信号,不同牌子的舵机旋转的角度也会有所不同。

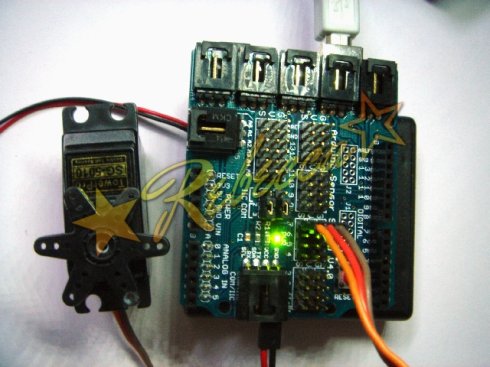
大概了解了舵机以后,我们就试着来控制一个舵机吧,将GND和+5V连接好之后,我选择信号输入口为数字接口7,至于供电部分要注意,舵机转动时电流会比较大,Arduino上的电源芯片可能会因过流保护到发热而损坏,电源需要接到外部供电,切不可使用USB供电(本人尝试过,深受其害)。

我本人更喜欢使用Arduino的传感器扩展板,如下图,连接舵机或传感器是超方便的。
连接好电路就来编写程序吧,我就让舵机转动到我输入数字所对应的角度数,并将角度显示到屏幕上。
程序如下:
int servopin=7;//定义舵机接口数字接口7
int myangle;//定义角度变量
int pulsewidth;//定义脉宽变量
int val;
void servopulse(int servopin,int myangle)//定义一个脉冲函数
{
pulsewidth=(myangle*11)+500;//将角度转化为500-2480的脉宽值
digitalWrite(servopin,HIGH);//将舵机接口电平至高
delayMicroseconds(pulsewidth);//延时脉宽值的微秒数
digitalWrite(servopin,LOW);//将舵机接口电平至低
delay(20-pulsewidth/1000);
}
void setup()
{
pinMode(servopin,OUTPUT);//设定舵机接口为输出接口
Serial.begin(9600);//连接到串行端口,波特率为9600
Serial.println("servu=o_seral_simple ready" ) ;
}
void loop()//将0到9的数转化为0到180角度,并让LED闪烁相应数的次数
{
val=Serial.read();//读取串行端口的值
if(val>'0'&&val<='9')
{
val=val-'0';//将特征量转化为数值变量
val=val*(180/9);//将数字转化为角度
Serial.print("moving servo to ");
Serial.print(val,DEC);
Serial.println();
for(int i=0;i<=50;i++)//给予舵机足够的时间让它转到指定角度
{
servopulse(servopin,val);//引用脉冲函数
}
}
}
下载完程序就可以输入1到9的数字,让你的舵机转相应的20°到180°了。
这里还有一个引用库函数的控制舵机的程序(取自Burn's Interactive ),供大家参考。
arduino0012版本新增伺服电机控制lib,可以让arduino更容易的控制伺服电机。
// 使用可变电阻控制伺服电机位置
#include //引入lib
Servo myservo; // 创建一个伺服电机对象
int potpin = 0; // 设定连接可变电阻的模拟引脚
int val; // 创建变量,储存从模拟端口读取的值(0到1023)
void setup()
{
myservo.attach(9); // 9号引脚输出电机控制信号
//仅能使用9、10号引脚
}
void loop()
{
val = analogRead(potpin);
// 读取来自可变电阻的模拟值(0到1023之间)
val = map(val, 0, 1023, 0, 179); // 利用“map”函数缩放该值,得到伺服电机需要的角度(0到180之间)
myservo.write(val); // 设定伺服电机的位置
delay(15); // 等待电机旋转到目标角度
}
特别需要注意的是控制信号只能通过9、10号引脚输出,也就是说,该lib最多可以控制两个伺服电机。
我本人对舵机调速一向是很头疼的,这里就不做过多的介绍了,不过我对机器人基地的32路伺服电机控制器(32路舵机控制器)是垂涎已久了,等有机会一定要买来尝试一下。