2012年珠海航展上,中国航天科技集团展出用于未来国家空间站的空间机械臂原型样机,根据当时披露的消息,空间站机械臂的研制正在有条不紊的顺利进行。作为空间站机械臂的原理试验,空间机械臂卫星也备受关注。2008年深圳举办的第十届中国国际高新技术成果交易会,,中国工程院院士蔡鹤皋展示了我国正在研制的空间机器人,并介绍我国计划2011年发射空间机械臂卫星。可惜好事多磨,直到2013年7月20日我国使用长征四号丙火箭以“一箭三星”的方式将实践十五号、试验七号和创新三号卫星送入轨道。新华社等媒体也迅速对这次发射进行了报道,宣布本次发射的三颗卫星主要用于开展空间碎片观测和空间机械臂操作等空间维护技术科学试验。
 7月20日我国在太原卫星发射中心使用长征四号丙火箭,以一箭三星的方式将实践十五、试验七号和创新三号卫星送入轨道
7月20日我国在太原卫星发射中心使用长征四号丙火箭,以一箭三星的方式将实践十五、试验七号和创新三号卫星送入轨道
根据2008年蔡鹤皋院士在深圳的介绍,我国计划研制和发射的空间机械臂卫星实际上是颗“字母星”。空间机械臂卫星上装有空间机械臂,它先抓着小卫星将其释放,然后追踪并择机抓回小卫星。从这些描述看,我国的空间机械臂卫星事实上进行了两项工作:空间交会和机械臂验证,设计的实验过程也与日本的ETS7卫星相当相似,回顾一下ETS-7卫星的试验,对了解我国空间机械臂可能的设计和试验是大有裨益的。
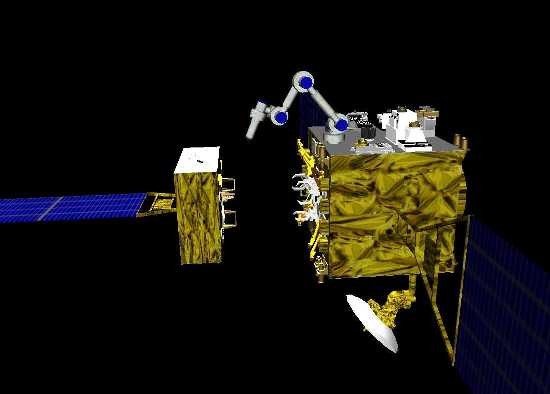
日本1997年发射了ETS7卫星,包括携带机械臂的主星和小型的目标星,它在1998~1999年的试验中验证了空间交会和机械臂释放捕获技术
日本的ETS (工程试验卫星) -7试验卫星于1997年发射,它是世界上第一颗装有机械臂的卫星。虽然编号为ETS-7卫星,但它其实是由追赶卫星和目标卫星两各部分组成,在轨道上会释放目标星变成两颗卫星。ETS-7卫星的追赶卫星构成了卫星的主体,被命名为Hikoboshi,Hikoboshi卫星上装有长度约2米的六自由度空间机械臂,主要用于进行空间交会和捕获试验,小得多的目标卫星名为Orihime,也装有太阳翼可自主飞行。ETS-7卫星设计寿命1.5年,1998年Hikoboshi卫星使用空间机械臂将目标星Orihime释放到2米处,并进行了15分钟的编队飞行,最后顺利完成了捕获和取回操作,成功进行了使用空间机械臂捕获的试验,第二次试验中两颗卫星分离后最大距离12千米,随后进行了自动交会和对接操作,1999年的第三次试验中,还进行了地面遥控飞行控制和碰撞回避机动等试验,并进行了R-bar(自地球方向接近)交会飞行试验。ETS-7卫星实际飞行时间达到了5年,超期服役期间又进行了后续试验。日本通过ETS-7卫星的在轨工程试验,突破和掌握了空间自动交会对接和空间机械臂技术,为研制HTV货运飞船的交会系统和Kibo实验舱的空间机械手,奠定了坚实的基础。
目前我国已经使用神舟八号、神舟九号和神舟十号飞船与天宫一号目标飞行器进行了累计6次交会对接试验,突破并掌握了空间交会对接技术,我国载人航天工程也随之进入空间实验室和空间站建设阶段。有鉴于此,我国的空间机械臂卫星的试验内容也更为简单,蔡鹤皋院士提到的追踪和抓回小卫星,不太可能是日本ETS-7卫星第二次试验中两颗卫星相距12千米的追踪和交会那样的内容,而更可能是ETS-7卫星第一次试验的目标卫星释放、编队飞行和捕获取回等操作,主要试验目的集中在机械臂本身的试验上。单纯从蔡鹤皋院士的报道等发射前的新闻,我们很难确认更多的信息,好在结合发射后的相关报道,还是给我们带来空间机械臂卫星更多的细节。
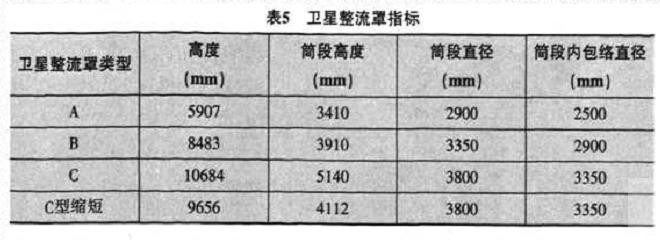 长征四号系列火箭的整流罩指标,使用四丙火箭最大的一个可能是需要更大的包络空间容纳三颗卫星
长征四号系列火箭的整流罩指标,使用四丙火箭最大的一个可能是需要更大的包络空间容纳三颗卫星
20日长征四号丙火箭自太原卫星发射中心发射后,北美防空司令部(NORAD)也及时更新了轨道数据库,公开了三星的轨道参数,从NORAD的TLE数据看,三颗卫星基本位于高度660X670千米、轨道倾角98.059度的太阳同步轨道上。根据长征四号丙火箭总师李相荣的文章,长征四号丙火箭相对长征四号乙火箭,第三级的YF-40A发动机增加了二次启动能力,从而大大提高了高轨道的运载能力。在660千米附近的太阳同步轨道上,长征四号丙火箭最大运载能力约3吨,而长征四号乙火箭在这个轨道的运力约2.5吨。长征四号丙火箭还使用更大的整流罩,其直径从长征四号乙火箭的2.9米/3.35米增加到3.8米,高度从5.9/8.5米增加到10.7米,整流罩内部包络空间大大增加。由于长征四号乙火箭发射成本更低,本次发射的三星或者总体积太大,或者总质量超过了2.5吨,以至于不得不使用运力和整流罩更大的长征四号丙火箭。笔者曾据此猜测相对长征四号乙火箭的指标,三颗卫星的质量体积超标。考虑到日本类似用途的ETS-7卫星质量高达2.86吨,即使我国空间机械臂卫星验证内容较少,卫星的质量尤其是体积也不会太小,三星总体积或质量超标,空间机械臂卫星很可能是“罪魁祸首”,不过根据《中国航天报》的报道,事实并非如此。
7月24日《中国航天报》在《长征四号丙一箭发射三星成功侧记》的文章中,明确指出试验七号卫星由航天东方红公司研制,虽然这颗卫星在体型和重量上都只能算小卫星,但它的功能却相当丰富。据试验七号卫星总设计师介绍,卫星集多项创新技术于一身,对我国未来探索太空和空间站建设具有十分重要的意义。在已经报道的内容中,只有空间机械臂才可能对空间站建设具有重要意义,空间机械臂是我国空间站的三大关键技术之一,我国未来的天宫二号空间实验室和国际空间站都将验证并使用机械臂。根据2007年于登云、孙京、马兴瑞合著的《空间机械臂技术及发展建议》一文,空间机械臂将用于目标监视与观测、在轨试验和建设和行星与深空探测三个主要方面,对我国探索太空也具有重要意义。综合分析判断,进行空间机械臂操作试验的空间机械臂卫星,就是中国航天科技集团五院航天东方红卫星有限公司研制的试验七号卫星。虽然空间机械臂卫星是一颗小卫星有些出人意料,但它的试验,对中国航天空间应用技术的发展仍然有着十分重要的意义,它是我国第一颗携带空间机器人的卫星,将成为我国空间机器人在未来航天活动中的探路者,为我国空间机器人的试验和应用的铺平道路。
 和平号空间站的核心舱装有Lyappa转位机械臂,它的功能非常有效,设计也相当简单
和平号空间站的核心舱装有Lyappa转位机械臂,它的功能非常有效,设计也相当简单
对于中国航天来说,空间机械臂还是一个刚刚开始轨道试验的新鲜事物,但在世界范围内,空间机械臂已经得到了广泛应用。空间机械臂是一个集机械、电子、动力、视觉和控制等多领域技术的空间机电系统,是货真价实的空间机器人。目前空间机械臂主要在国际空间站上使用,用于支持国际空间站的组装建造和日常维护,在航天员的舱外活动中也起到了至关重要的作用,还用于进行空间站舱外载荷试验等活动。
空间机械臂的诞生源自载人航天发展的需求,早期的空间机械臂比较原始,功能也相对有限。以苏联“和平号”空间站上的机械臂Lyappa为例,它结构上非常简陋,只在空间站的建设过程中用于舱段的转位。和平号空间站的舱段对接时要对接在核心舱轴向的前向接口上,随后使用Lyappa机械臂移动到径向的四个对接口之一长期停泊,这是Lyappa空间机械臂唯一的用途,我国预计2020年左右建成的的国家空间站借鉴了“和平号”空间站的这个设计,也研制了转位机构用于两个实验舱的转位。

加拿大机械臂2具有强大的性能和丰富的功能,图为STS114任务中机械臂协助航天员的舱外活动
“和平号”空间站上的Lyappa转位机械臂相当简单,但同期西方研制和使用的空间机械臂要复杂得多。在苏联建造“和平号”空间站的同时,美国不仅正在运营航天飞机机队,还在研制比“和平号”先进一代的“自由号”空间站。无论是航天飞机还是“自由号”空间站,都使用了先进的机械臂,它们均由加拿大空间局研制,分别命名为加拿大机械臂和加拿大机械臂2。加拿大机械臂安装在航天飞机上,长度约15.2米,质量410千克,移动速度为60厘米/秒(空载)和6厘米/秒(满载),它最初最多可用于释放或抓取332.5千克的载荷,后来机械臂移动载荷的能力提高到3293千克,以支持国际空间站的组装建造。1981年航天飞机的第二次飞行任务中,加拿大机械臂就正式亮相,在航天飞机的135次飞行中由50多次任务使用了加拿大机械臂,协助航天飞机进行卫星释放、卫星捕获和卫星维护等多种操作,并执行了“哈勃”空间望远镜的维修以及国际空间站桁架安装等多种任务,在航天飞机的太空史上立下汗马功劳。
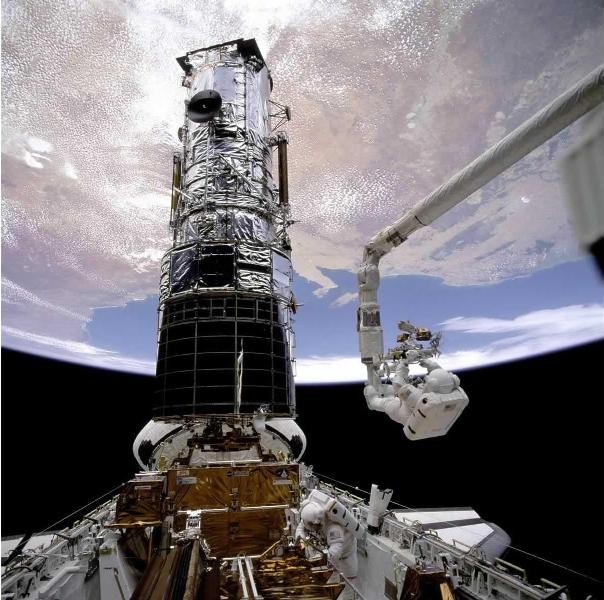 STS-61进行了哈勃望远镜维修任务 ,图为哈勃望远镜和正在辅助航天员舱外工作的加拿大机械臂
STS-61进行了哈勃望远镜维修任务 ,图为哈勃望远镜和正在辅助航天员舱外工作的加拿大机械臂
加拿大机械臂2性能更为先进和强大,它原计划用于“自由号”空间站,最后安装于国际空间站上,是国际空间站组装、维护和日常工作必不可少的关键组成部分。加拿大机械臂2是国际空间站移动服务系统(MSS)的一部分,它包括17.6米长的7自由度加拿大机械臂2和移动底座,以及一个特殊用途的15自由度的灵巧操作臂(SPDM)组成。加拿大机械臂2曾用于辅助航天飞机的对接,也是国际空间站众多舱段、桁架和载荷的转移和安装的主要手段,还是日本HTV、美国Dragon和Cygnus货运飞船对接必不可少的捕获对接工具,在国际空间站的舱外维护和试验中也发挥了不可缺少的作用。加拿大航天局凭借空间机械臂的贡献获得了国际空间站3%的使用权,由此可以看出加拿大机械臂2的特殊地位和空间机械臂的重要作用。
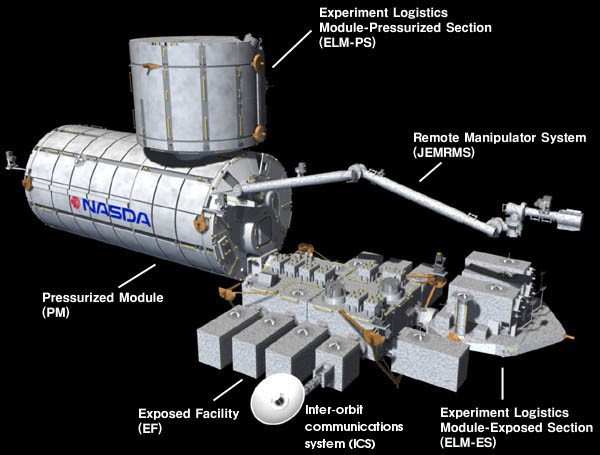
日本的希望号实验舱为了支持舱外暴露平台等载荷的操作,也装有高性能的6自由度JEMRMS机械臂
国际空间站上还装有欧洲空间局的欧洲机械臂(ERA)和日本的实验舱机械手系统(JEM RMS)。ERA是一个11米长的7自由度机械臂,它安装在俄罗斯的实验舱上,作用与加拿大机械臂2相似,都可以用于安装部署和更换太阳翼、搬运舱外载荷和辅助航天员舱外活动,预计明年ERA将随着俄罗斯“科学号”实验舱一块飞抵国际空间站。JEM RMS系统是一个长度10米的6自由度机械臂,末端还安装了一个2米长的6自由度小型灵巧机械臂,它更类似于是缩小简化的移动服务系统,由于基本用于支持日本“希望号”(Kibo)实验舱的舱外试验,而“希望号”的舱外暴露平台的工作相对简单,因此没有爬行能力而且小机械臂的自由度也更少。
2012年珠海航展上展出的空间机械臂样机,它与加拿大机械臂2一样是7自由度机械臂,具备爬行能力
随着人类航天技术的发展,空间机械臂将在未来得到越来越多的应用。我国虽然载人航天工程开展较晚,但早在20世纪80年代就开始了空间机械臂的基础研究和演示项目,预研探索和攻关空间机械臂的相关技术与关键技术,并进行了多个空间机械臂的地面演示。我国载人航天工程突破掌握载人飞船和交会对接技术后,下一阶段中空间机械臂的使用开始提上日程,我国空间机械臂的研究也随之加速。我国2015年左右发射的天宫二号空间实验室上,可能装载试验型空间机械臂进行轨道测试,而未来的国家空间站将安装性能更为强大的空间机械臂系统。2012年中国航天科技集团五院在竞标中获胜,赢得了研制生产空间站核心舱机械臂的合同。据2012年底珠海航展上的介绍,我国空间站机械臂将是一种具备爬行能力的7自由度冗余机械臂,它长度约10米,最大负荷25吨,可在轨运行10年以上,满足我国建造、维护和运行大型长期有人照料空间站的需求。
根据我国载人航天领域最具权威的《载人航天》刊物2013年的文章,我国空间站核心舱配置大型机械臂一个,实验舱配置小型机械臂一个,两个机械臂可各自独立工作,也可组合为一个机械臂工作。我国空间站机械臂将用于完成舱段的捕获、转移和安装,舱外设备的安装、维护和更换,并辅助航天员的舱外活动。从这些描述看,我国未来国家空间站的机械臂几乎是目前国际空间站的加拿大机械臂2和灵巧操作臂的缩水版,也可以视为日本实验舱机械手的增强版,这对我国空间机械臂的研制是一个巨大的挑战。
 中国国家空间站将使用一只大型机械臂和一只小型机械臂,期待我们早日在太空看到空间站机械臂的身影
中国国家空间站将使用一只大型机械臂和一只小型机械臂,期待我们早日在太空看到空间站机械臂的身影
前途是光明的,但道路是曲折的。我国尽管空间机械臂的研制开展很早,目前已经完成了6自由度和7自由度空间机械臂原理样机的研制,但仍于以加拿大机械臂2为代表的主流空间机械臂系统有着不小的差距。差距一方面源自我国基础工业基础相对薄弱,在机械、电子和控制等方面与外国差距很大,对空间机械臂这样多学科的一体化系统支撑能力不足,也与我国系统设计、集成和测试方面经验较少有关,尤其是缺乏实际空间演示验证的反馈。7月20日试验七号空间机械臂卫星的发射和在轨试验,将成为我国空间机械臂发展的一个重要里程碑,通过空间机械臂的在轨遥操作试验,检验我国空间机械臂的实际效果,为未来空间实验室和空间站的大型空间机械臂的发展提供宝贵的经验。
空间机械臂卫星除了为空间站机械臂的研制积累经验,它本身还可以成为未来轨道服务的试验平台,为我国未来突破和掌握卫星轨道维护、更换可替换配件和补加推进剂等技术进行技术验证,还可试验轨道监视和检测等军民两用技术。空间机械臂还是我国进行深空探测的关键技术之一,未来的月球和小行星取样工作中,对样本的观察、分析和选择,以及拾取、装载和转移工作,都需要空间机械臂的参与。例如我国嫦娥五号月球取样返回探测器使用了先进的月球轨道交会技术,可取回高达2千克的月球样本,但取样样本需要自着陆舱上升段转移到返回舱,很难想象离开空间机械臂的参与,能完成如此复杂的转移工作。
空间机械臂作为一个集多种先进技术于一身的空间机电机器人系统,有着广阔的应用前景,是我国载人航天和深空探测中必不可少的关键技术。空间机械臂的发展还将带动我国空间材料、高精度机械、电子芯片和数字图像处理等多个领域的发展。不积跬步无以至千里,我国空间机械臂的发展首先要解决进入太空的有无问题,试验七号空间机械臂卫星很可能具备遥控制和自主控制等多种工作模式,支持载荷释放、拍摄和抓取等多种基本功能的试验演示,它作为我国空间机械臂的开路先锋,对于下一步试验功能完整的空间机械臂以及后续开展实际工程应用,有着重要的技术验证和演示价值。
