本项目是一个仿生双足行走机器人,其控制电路非常简单的,这里介绍的重点在于能够实现模拟人形双足行走的机械传动机构。本项目机器人只有一对大脚丫而没有手臂,关注科幻看过动画片的朋友应该知道,这个造型有点像机甲机器人中的侦察兵,由此起个名字叫“探路者”。不过机器人侦察兵是灵活、跑得快,本项目机器人走起路来却是小心翼翼、摇摇晃晃的,同样是侦察探路,本项目机器人其实是在沼泽水洼地里探路,一不小心踩到一个水坑里去了,哈哈。

本项目机器人有两个版本,一个常规电池版本的,行走的速度较快,另一个太阳能版本的,行走的速度就有点堪比蜗牛了。以下为视频效果。
本项目套件的淘宝地址:
http://item.taobao.com/item.htm?id=10533060449(A版)
http://item.taobao.com/item.htm?id=10532996745(B版)
一、基本原理
1.1、运动方式
1.2、驱动机理
1.3、电路原理
二、准备工作
三、制作过程
3.1、动力系统
3.1.1、引擎
3.1.2、减速箱
3.1.3、支架
3.2、PVC-Robot 13号-A版
3.2.1、电源系统
3.2.2、传动系统
3.2.3、支撑结构
3.2.4、总装调试
3.2.5、结构更新
3.2.6、效果展示
3.3、PVC-Robot 13号-B版
3.3.1、传动系统
3.3.2、控制电路
3.3.3、支撑结构
3.3.4、效果展示
3.4、调试完善
四、常见问题
五、项目总结
本项目的机器人与前面几个仿生类项目的机器人一样,都是利用特殊的机械结构,把减速电机的转动方式转化为机械运动方式,以此来驱动机器人模仿生物的行为――双足直立行走。
本项目机器人的双足直立行走的运动方式,大家肯定都很熟悉,毕竟我们人类本身就是靠双足直立行走的。两者在本质的运动原理上是类似的,只不过说由于人类的肢体结构比较复杂,在行走的过程中可以做很多细节调整,所以动作很灵活流畅;而本项目机器人结构相对还是比较简单,活动方式也比较机械,所以动作相对也会显得比较僵硬。
即:
1、先迈左脚,左脚离地,身体重心转移到右脚,由右脚支撑身体;
2、右脚产生一个后蹬趋势,支撑身体前移;
3、左脚着地,身体重心转移到两脚之间,身体完成一段距离的移动;
4、再迈右脚,右脚离地,身体重心转移到左脚,由左脚支撑身体;
5、左脚产生一个后蹬趋势,支撑身体前移;
6、右脚着地,身体重心转移到两脚之间,身体再完成一段距离的移动;
7、继续迈左脚……
如此往复循环,实现双足行走。以下为本项目机器人运动方式的分解图。
本项目机器人采用双足行走,那么对双足的驱动力量肯定要足,在这一点上和前面的几个仿生类机器人项目都是一样的,即都是借助减速电机所具有的“低转速、高扭矩”的特性来实现的。
本项目机器人实现双足行走的机械结构,其实是和PVC-Robot 12号类似的“连杆机构”――“
摆动曲柄滑块机构”,只不过说这个在PVC-Robot 12号中这个连杆机构是朝上安装驱动双臂的,而在本项目中这个连杆机构是朝下安装驱动双足的,即
把电机的旋转运动变为不断前后摆动的迈步运动。相关资料请参考:
PVC-Robot 12号――驱动机理 下面为摆动曲柄滑块机构应用在本项目中的运动过程示意图。
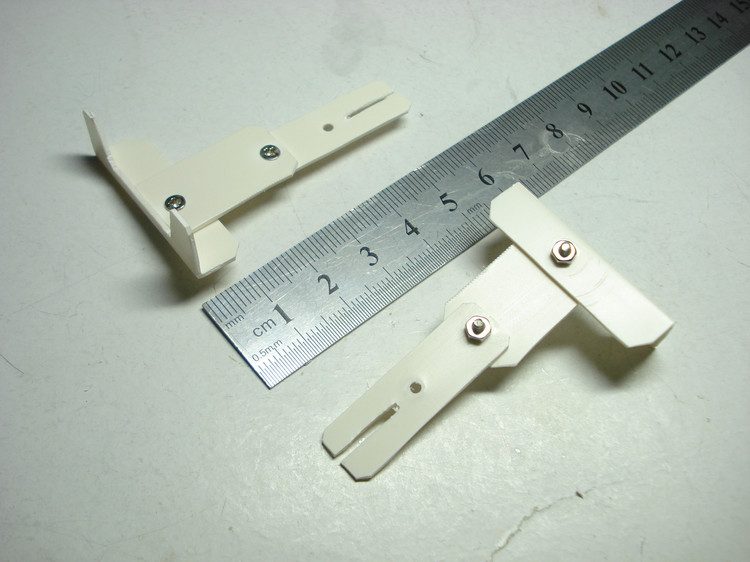
以下为两种一样的摆动曲柄滑块机构连杆,前者采用了离心圆盘作为转动结构,而后者则采用了曲柄作为转动结构,两者本质是一样。为了加工方便,一般多用后面一种”曲柄“结构(可省掉一个圆盘)。而在本项目中我们采用的也是后面的设计。
为了使本项目机器人能双足直立行走,我们需要让“摆动曲柄滑块机构”连接一个能够支撑身体的大大脚丫。
为了机器人能够让双足交替向前迈步行走,则“摆动曲柄滑块机构”的安装也比较巧妙,我们用了左右两套相同的连杆机构,且为同轴的方式安装(同一根转动的轴),但两个连杆的铰链结合部分的位置正好相反,即分别位于转盘一条直径线上的两头,也就是曲柄的位置正好相反,使得左右两套连杆机构在同一时间上运动的状态刚好相反,比如:一个位于最左边的位置的时候另一个正好位于最右边的位置,一个位于最高的位置的时候另一个正好位于最低的位置。
这里特别说明一下,前面关于本项目机器人运动方式的介绍中,关于双足行走运动的分解步骤有提到:在迈出左脚时,只有右脚着地,为了确保身体平衡,必须把身体的重心移到右脚上。
1、对于我们拥有复杂肢体结构的人类来说,可以通过微调身体的姿势很容易的把身体重心进行改变,以保持身体的平衡(这一点我们自己可以尝试短时间的单脚站立就可以体会到);
2、对于一些拥有较多关节结构的智能机器人,可以通过改变脚踝关节的角度,让机器人身体往右倾斜,达到把身体重心移动到右脚以保持身体的平衡(关于这类复杂的机器人,我们将在本教程今后的中、高级篇中介绍);
3、本项目机器人,结构相对比较简单,无法通过改变关节角度而改变重心,这个时候就需要把支撑脚的脚掌做得比较大,让左脚离地时,仅靠右脚还是能够保持住身体的平衡。
与上一个项目PVC-Robot 12号一样,本项目也是分为A版的常规电池版本和B版太阳能版本:A版电路是非常的简单;B版采用与之前的2号到6号以及8号类似、与10号、12号一模一样的太阳能脉动充放电控制电路。
PVC-Robot 13号-A版
本项目A版机器人的电路原理比较简单,就是直接一组电池连接一个电机,中间通过一个拨动开关来控制电路的通断。
PVC-Robot 13号-B版
本项目B版机器人的电路采用的还是那个经典的太阳能脉动充放电控制电路,与10号、12号一样也是属于改良型电路版本,即采用了额定电压为5V的太阳能电池板,整个电路的标准太阳能充电电压由原来的3V变为5V,由此:
1、为了充分利用电能,电路充电的电压上限需要加大,即原来的一个LED发光二极管变为用两个LED发光二极管,具体见下图中串联在一起使用的两只LED发光二极管;
2、由于电路电压较高,假如我们项目中
使用了功耗比较小的电机,
在光线较强的情况下,电路放电带动电机转动时,由于电机消耗的电流比较小,导致放电的速度还跟不上充电的速度,这样就会导致电路用于处于一种“半导通”的死循环状态无法正常运行下去,也就是出现了电机开始转了一下之后就再也不转了的情况。(更多相关内容请参见:
常见问题)
为了解决这个问题,我们可以考虑
在电机两侧并联一个47欧姆的小电阻(色环:黄紫黑金棕),具体见下图中电机两侧用虚线连接的电阻。当然这种情况并不是总会发生(如果采用功耗大一些的电机),只是假如采用本博客对应
淘宝店提供的套件,出现这种情况的几率要大一些。(更多相关内容请参见:
调试完善)
基本原理如下:
1)太阳能电池板给电解电容充电,电解电容两端的电压不断上升;
2)当电路电压达到2个串联在一起的LED二极管的导通电压(4V左右)时,LED二极管导通;
3)三极管9015的基极从导通的LED二极管获得足够的导通电压,则三极管9015导通;
4)三极管9015导通后,又使三极管9014的基极获得足够的导通电压,则三极管9014导通;
5)三极管9014导通后,电机获得电流开始转动;
6)电机转动,消耗电解电容中存储的电能,电路电压下降;
7)当电路电压下降到低于2个串联在一起的LED二极管的导通电压(4V左右)时,LED二极管截止;
8)虽然三极管9015的基极失去了来自LED的导通电压,但是由于此时三极管9014已经导通,导通后的电流除了提供给电机转动之外,还通过电阻分流了一部分重新回到三极管9015的基极(形成一个循环),即三极管的基极还是有足够的导通电压;
9)当电机继续转动消耗电解电容的电能时,电路电压进一步下降,则即便三极管9014导通后回流给三极管9015基极的电压也无法保证三极管9015继续导通(循环被破坏),则两个三极管都截止,电机停止转动;
10)电解电容重新充电,继续重复上面的各环节。
简单的说,即:太阳能电池对电解电容充电,当充电量达到由LED二极管设置的充电上限后,则电路开始瞬间放电提供给电机转动;虽然电机转动消耗电能使电压下降至低于LED二极管的下限,但是由于电路存在一个导通循环的机制,仍然会继续放电让电机转动,能够尽可能的把电解电容中存储的电能都消耗掉;消耗完电解电容中的电能后,重新由太阳能电池对其进行充电……如此循环往复。
也可以这样理解:太阳能电池对电解电容进行缓慢充电(太阳能电池的电流比较小),充电达到上限后对电机进行瞬间放电(电机的电流比较大);放电停止的下限比较低,可以比较彻底的把充电的电量消耗完。
本项目需要的器材主要包括:PVC线槽、电机(带减速齿轮箱)、太阳能电池、电池盒、电阻、电解电容、二极管、三极管、螺丝/螺帽等。
本项目采用宽度为2.5CM的PVC线槽,另外A版还要有2节7号干电池。
以下列出本项目的其他主要器件:
PVC-Robot 13号 A版
|
|
名称 |
规格 |
数量 |
用途 |
|
1 |
减速电机 |
带齿轮减速箱的微型马达 |
1个 |
动力 |
|
2 |
电池盒 |
7号电池盒(2节) |
1个 |
电源 |
|
3 |
拨动开关 |
小拨动开关 |
1个 |
电源开关 |
|
4 |
电路导线 |
红/黑 |
若干 |
电路连接 |
|
5 |
蜗杆 |
孔径1.9mm |
1个 |
减速机构 |
|
6 |
齿轮 |
孔径1.9mm |
1个 |
减速机构 |
|
7 |
短轴 |
铁制长1.2CM,直径1.8mm |
1个 |
蜗杆轴 |
|
8 |
长轴 |
铁制长4.5CM,直径1.8mm |
1个 |
齿轮轴 |
|
9 |
曲别针 |
文具回形针 |
1个 |
限位杆 |
|
10 |
M1.2*5螺丝/螺母 |
直径1.2mm,长5mm |
6对 |
固定PVC材料 |
|
11 |
M2*10螺丝/螺母 |
直径2mm,长10mm |
2对 |
曲柄铰链 |
|
12 |
M2*6螺丝/螺母 |
直径2mm,长6mm |
6对 |
固定PVC材料 |
|
13 |
M2螺母 |
直径2mm |
2个 |
固定曲柄 |
|
14 |
M3垫片 |
直径3mm |
2片 |
装饰(眼睛) |
|
15 |
M3垫片 |
直径3mm |
2片 |
铰链垫片 |
|
16 |
M2垫片 |
直径2mm |
2片 |
铰链垫片 |
|
|
|
|
|
|
PVC-Robot 13号 B版
|
|
名称 |
规格 |
数量 |
用途 |
|
1 |
减速电机 |
带齿轮减速箱的微型马达 |
1个 |
动力 |
|
2 |
太阳能电池 |
5V |
1片 |
电源 |
|
3 |
电阻 |
2.2K(色环:红红黑棕棕) |
1个 |
电子元件 |
|
4 |
电阻 |
47Ω(色环:黄紫黑金棕) |
1个 |
调试备用元件 |
|
5 |
电解电容 |
4700uf |
1个 |
电子元件 |
|
6 |
二极管 |
LED发光二极管 |
2个 |
电子元件 |
|
7 |
三极管 |
9014、9015各1个 |
2个 |
电子元件 |
|
8 |
电路板 |
电路实验板/万用板/洞洞板 |
1块 |
|
|
9 |
电路导线 |
红/黑/绿 |
若干 |
电路连接 |
|
10 |
蜗杆 |
孔径1.9mm |
1个 |
减速机构 |
|
11 |
齿轮 |
孔径1.9mm |
1个 |
减速机构 |
|
12 |
短轴 |
铁制长1.2CM,直径1.8mm |
1个 |
蜗杆轴 |
|
13 |
长轴 |
铁制长4.5CM,直径1.8mm |
1个 |
齿轮轴 |
|
14 |
曲别针 |
文具回形针 |
1个 |
限位杆 |
|
15 |
M1.2*5螺丝/螺母 |
直径1.2mm,长5mm |
6对 |
固定PVC材料 |
|
16 |
M2*10螺丝/螺母 |
直径2mm,长10mm |
2对 |
曲柄铰链 |
|
17 |
M2*6螺丝/螺母 |
直径2mm,长6mm |
6对 |
固定PVC材料 |
|
18 |
M2螺母 |
直径2mm |
2个 |
固定曲柄 |
|
19 |
M3垫片 |
直径3mm |
2片 |
装饰(眼睛) |
|
20 |
M3垫片 |
直径3mm |
2片 |
铰链垫片 |
|
21 |
M2垫片 |
直径2mm |
2片 |
铰链垫片 |
|
|
|
|
|
|
本项目套件的淘宝地址:
http://item.taobao.com/item.htm?id=10533060449(A版)
http://item.taobao.com/item.htm?id=10532996745(B版)
以下将按照制作的顺序,全程介绍本项目机器人的制作过程。
与前面几个仿生机器人项目一样,本项目的关键之一也是动力系统――减速电机,且也同样是采样蜗杆传动机构原理对现有减速电机进行改造的,相关原理里不再重复说明,有兴趣的可以点击这里了解:
PVC-Robot 11号――减速机构 下面主要对具体实现过程进行详细说明。
特别注意:对现有减速电机的改造,是需要一定的动手能力的,而且需要足够的耐心和细心,否则将有可能功归于溃。
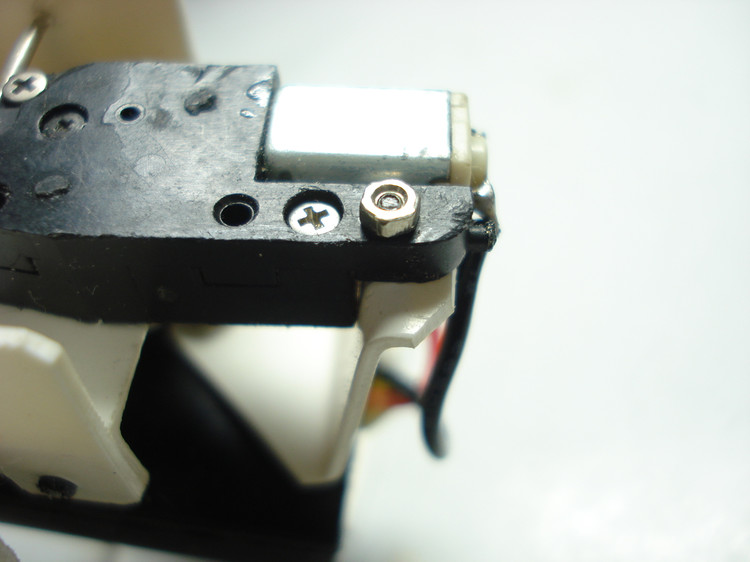
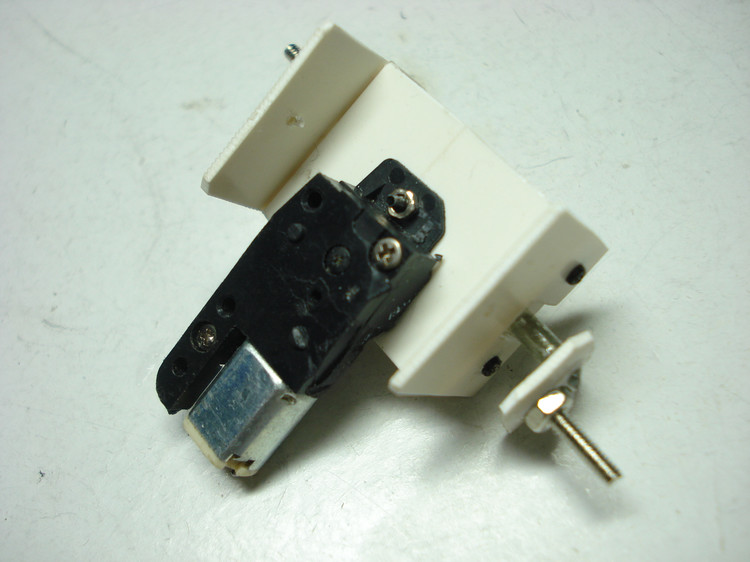
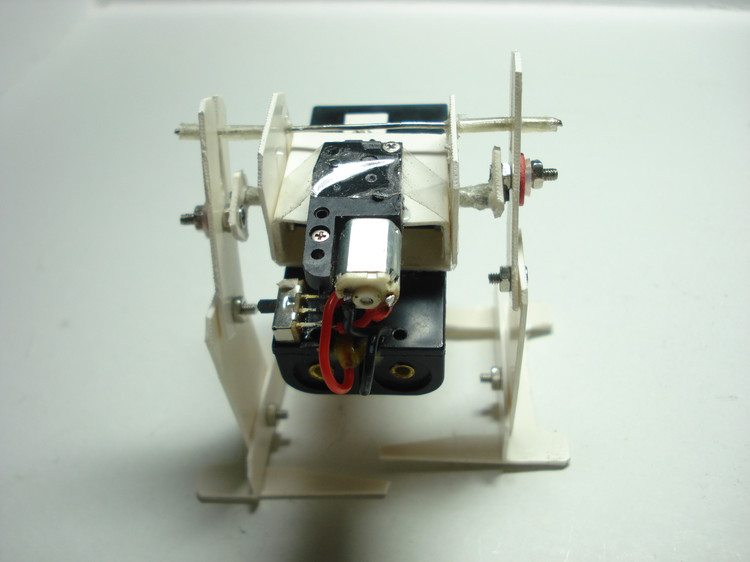
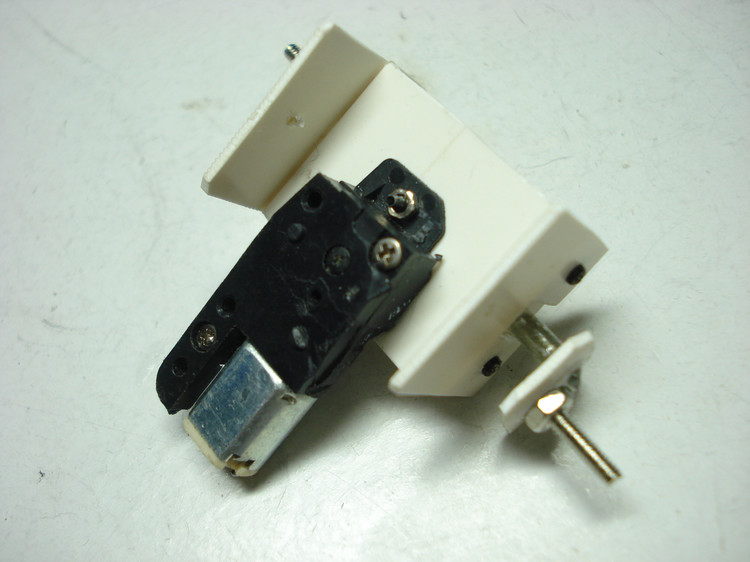
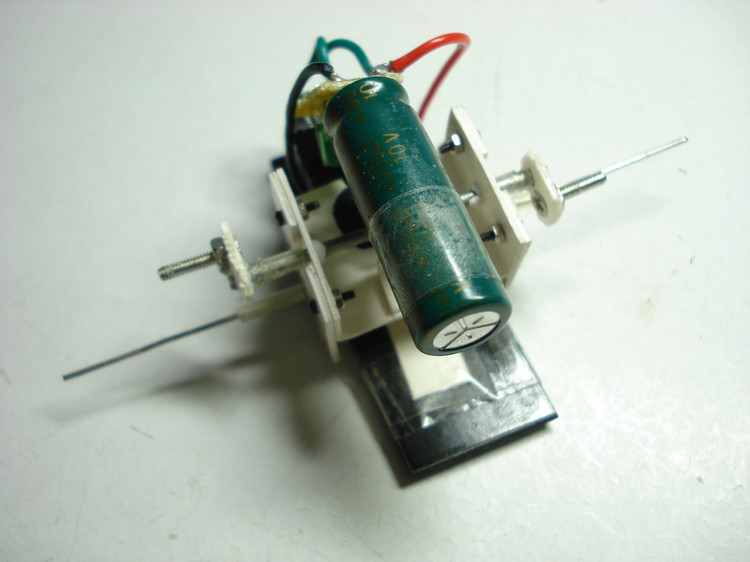
下图第一个为减速电机原型的正面俯视图,第二个为减速电机原型的侧面俯视图。
从这两个图我们可以看出减速电机原来正面上是有4个作为安装卡位点的突起,需要用刻刀或者裁纸刀把这四个突起削掉;另外我们还可以看到减速电机的输出转盘上,有一个小长条突起,这里也要把它用刻刀或者裁纸刀削掉。
下图中第三个为削掉安装卡位突起和输出转盘突起的减速电机。
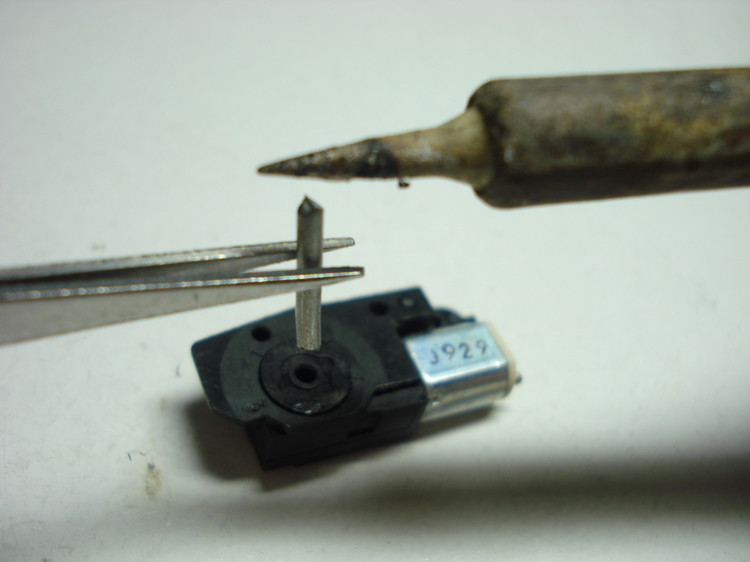
当前减速电机没有突出的转轴,只有在输出转盘上有一个安装孔。截取一段直径1.8mm、长度大约为1.2CM铁丝或者钢丝直条,作为减速电机的输出转轴。
选择的直径为1.8mm的输出转轴比减速电机转盘上的安装孔(直径1.4mm左右)直径要大一些,而减速电机转盘本身又是塑料制作的,为了把输出转轴安装到电机的转盘上,我们可以用镊子把转轴夹住,借助电烙铁对输出转轴加热,然后趁热直接插入电机的塑料转盘中。
转轴插入塑料转盘的安装孔之后,继续用电老铁对转轴加热,让转轴插入更深一些,同时注意调整转轴的角度,尽可能的确保转轴与转盘之间是完全垂直的。
如果转轴与转盘之间不是互相垂直的,则继续通过电烙铁边加热边调整角度。特别注意:转轴不要插入过深以免影响到减速电机的内部机构。
俯视减速电机判断转轴与转盘基本保持垂直。
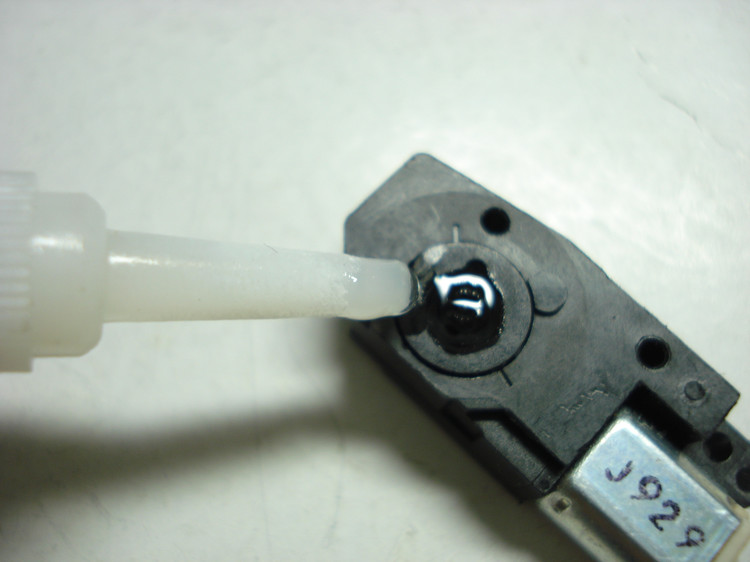
冷却后,转轴可以先用钳子拔出来,然后往被扩大了的安装孔中滴入502胶水,并且在周围也涂上一些,但是特别小心不要涂到转盘之外而影响了转盘的正常转动。
特别提醒:由于502胶水渗透性强,干得快,使用时要格外小心,如果没有控制好用量,轻则会把不该粘住的东西粘起来了,严重的有可能会导致器件的损坏报废,一般建议使用前先试一下会不会出水孔过大一次性会滴出过多胶水,必要的时候可以用牙签之类的工具蘸着胶水涂到要粘贴的部位。假如不是特别必要的,不要用502胶水粘贴电机的外壳等部位。
把转轴重新插入滴了502胶水的转盘上的安装孔,并调整好转轴的角度确保转轴与转盘之间尽可能为垂直的。
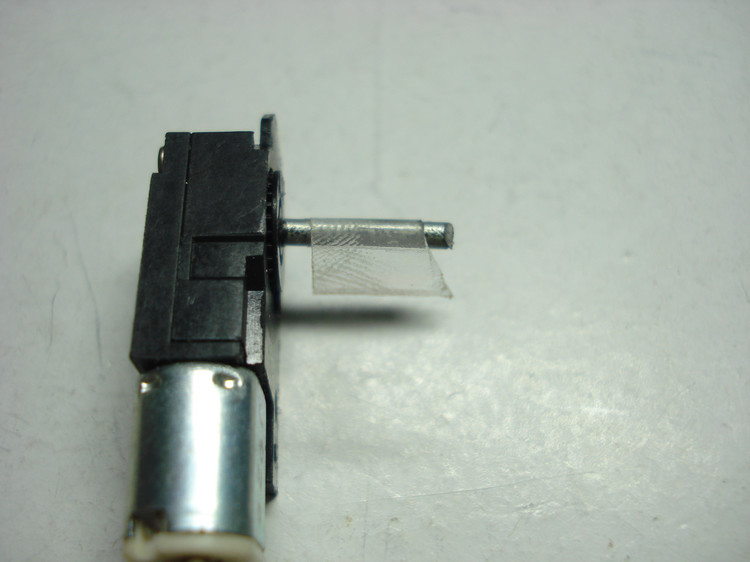
等一会502胶水干之后,开始在转轴上安装蜗杆。因为转轴直径(1.8mm左右)略小于蜗杆(1.9mm),则不好直接把蜗杆安装到转轴上。这个时候我们可以先剪一小段透明胶布,缠绕转轴包裹起来。
尝试调整包裹的透明胶布的长度,让蜗杆正好能够套上转轴,不松也不紧。
确定好转轴上包裹的透明胶布长度之后,我们先把蜗杆取下,在包裹了透明胶布的转轴上涂上一层502胶水。
特别提醒:由于502胶水渗透性强,干得快,使用时要格外小心,如果没有控制好用量,轻则会把不该粘住的东西粘起来了,严重的有可能会导致器件的损坏报废,一般建议使用前先试一下会不会出水孔过大一次性会滴出过多胶水,必要的时候可以用牙签之类的工具蘸着胶水涂到要粘贴的部位。假如不是特别必要的,不要用502胶水粘贴电机的外壳等部位。
最后把蜗杆套到转轴之上,并在蜗杆和转轴的接合部位也涂上一些502胶水,具体如下图所示。
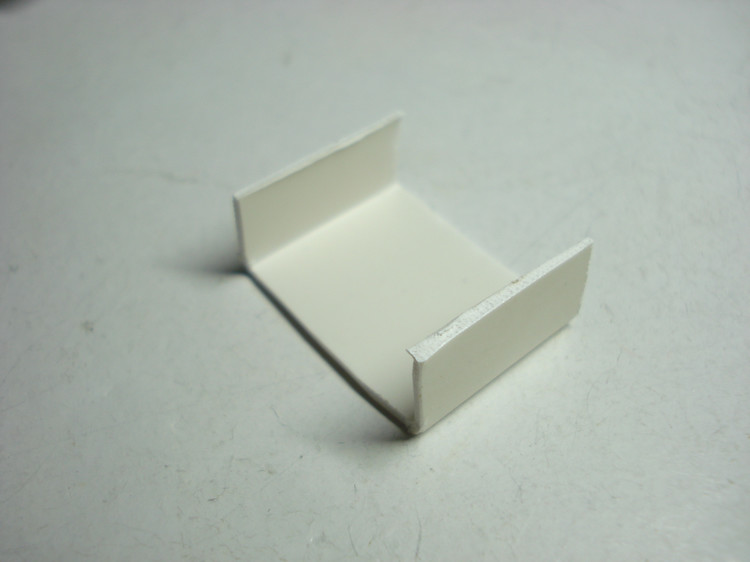
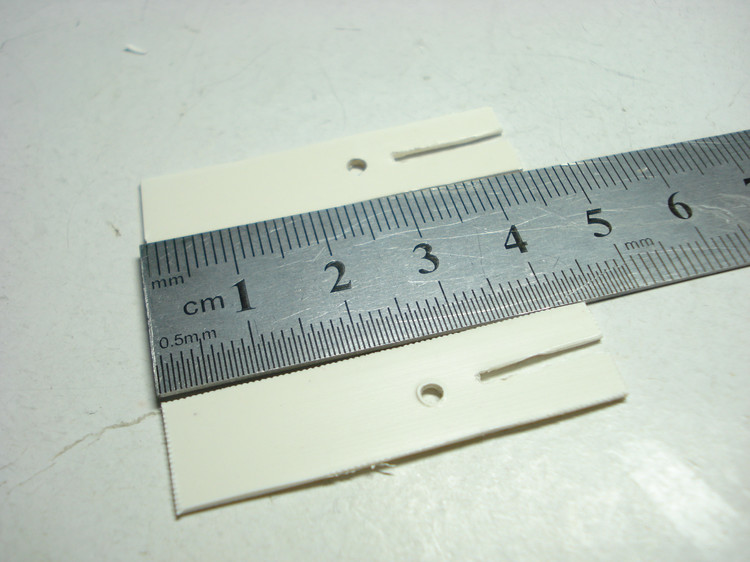
选择宽度为2.5CM左右PVC线槽,用剪刀剪线槽的凹槽部分,长为2CM的一段,。
把PVC线槽凹槽部分顶上的卡槽剪掉,如下图所示,作为减速箱的外壳。
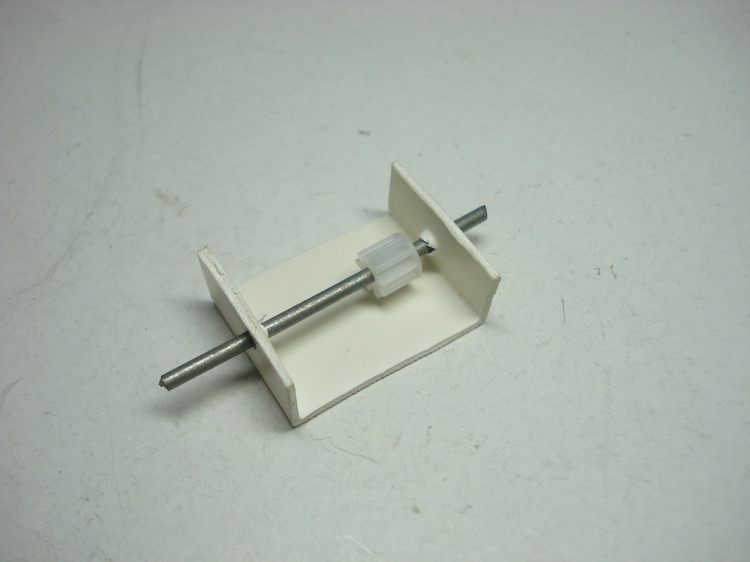
在减速箱的外壳两侧的中心位置,用锥子打两个直径2mm左右的小孔。
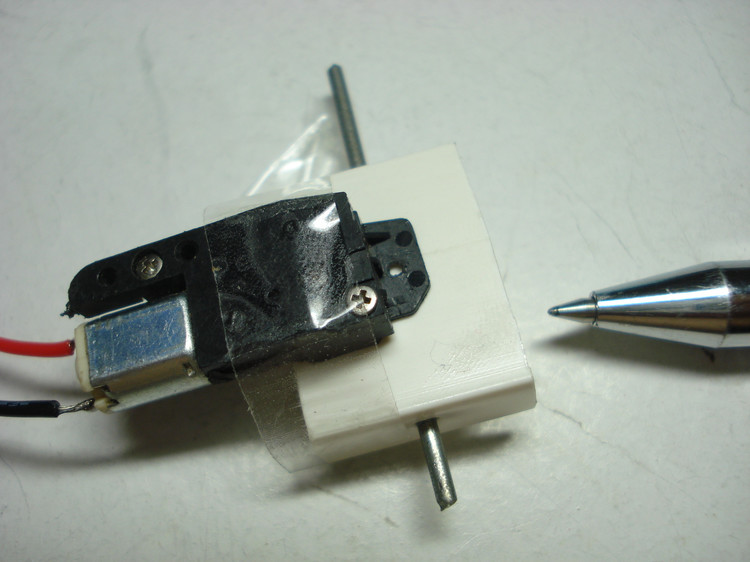
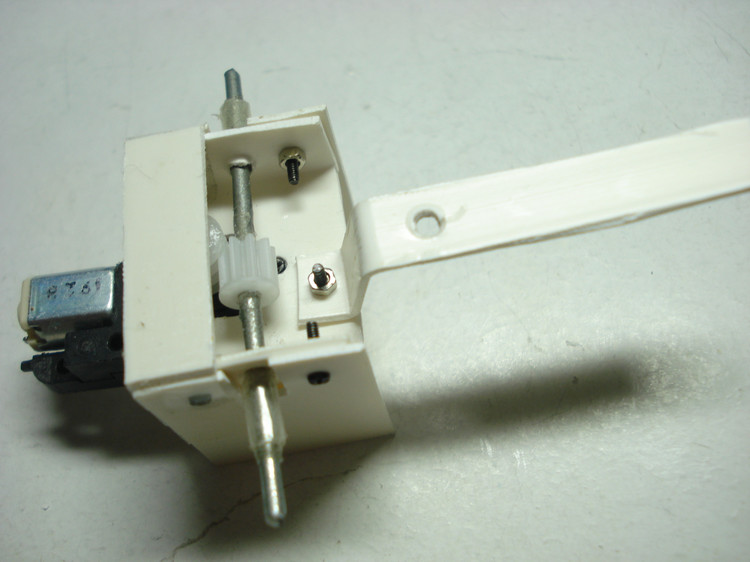
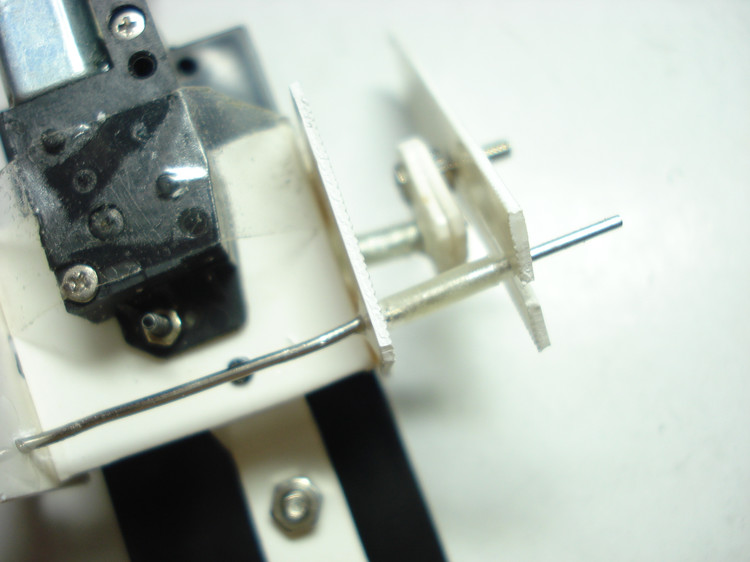
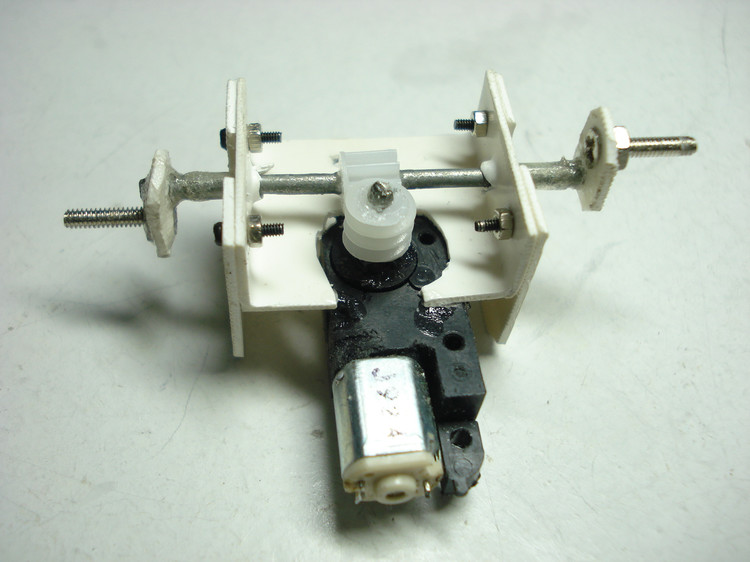
尝试把长度为4.5CM左右的输出轴套上小齿轮,如下图所示,安装到减速箱外壳上。
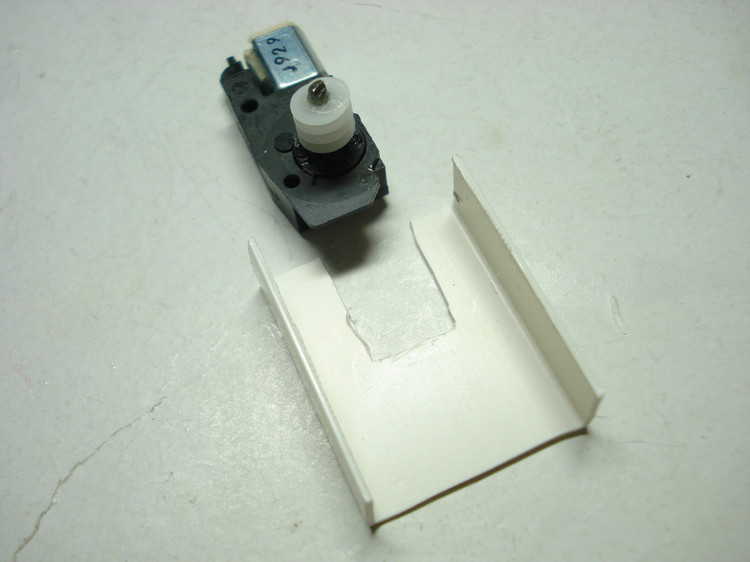
用剪刀在减速箱外壳上剪开一个槽位。
把减速电机边上安装位上的褶皱削掉,再用锥子在上面打一个小孔。
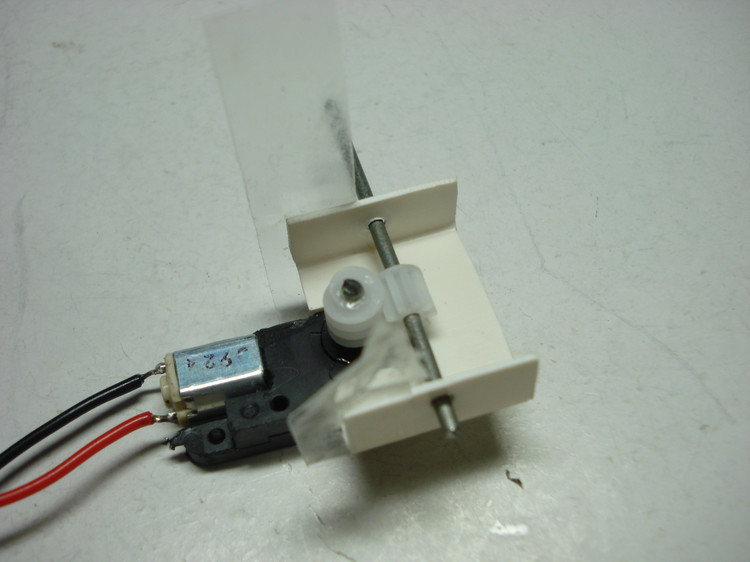
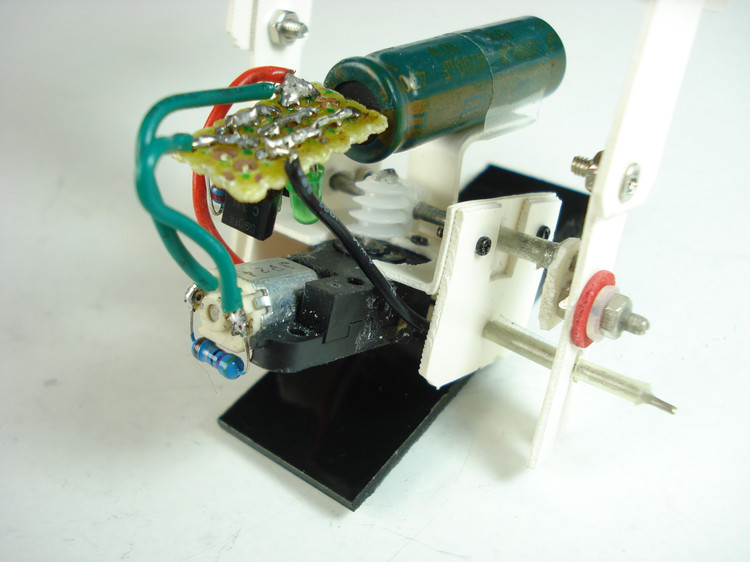
如下图所示,把减速电机和减速箱都装上,并且减速电机接上电源线让减速电机转动尝试着通过蜗杆带动齿轮,在蜗杆和齿轮咬合比较合适的情况下,用透明胶布把减速电机和减速箱外壳固定起来。
另外,由于电机的电极机比较小,假如不熟练则不容易给电极上焊锡,建议可以涂上一些焊锡膏后再尝试焊接,并且由于焊锡膏有一定的腐蚀性,所以完成焊接后再用纸巾或者抹布擦干净残留的焊锡膏。
透过减速电机上的安装孔用签字笔在减速箱外壳上做好打孔的标记,最后再对着该标记在减速箱的外壳上打好安装孔。
特别提醒:这里要打的孔对位置的精度要求还是比较高的,因为这个孔决定了蜗杆和齿轮间的接合是否顺畅,影响到整个蜗杆传动机构的性能。
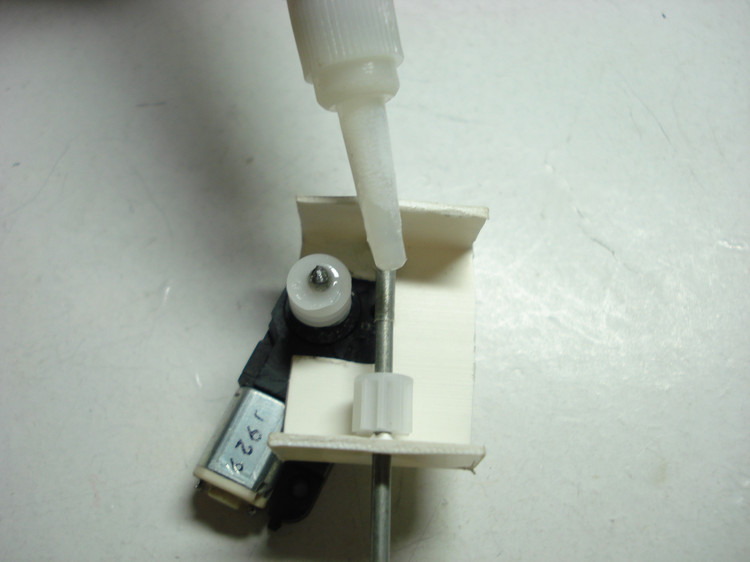
假如齿轮的孔径(1.9mm),为了固定输出轴上的小齿轮,可以类似前面那样在输出轴上对着蜗杆的安装位置,包裹一些透明胶布,确认能够让小齿轮安装的时候不至于过松。
把输出轴包裹了透明胶布的位置,用502胶水涂好后,再把小齿轮重新移到与蜗杆咬合的位置。
特别提醒:由于502胶水渗透性强,干得快,使用时要格外小心,如果没有控制好用量,轻则会把不该粘住的东西粘起来了,严重的有可能会导致器件的损坏报废,一般建议使用前先试一下会不会出水孔过大一次性会滴出过多胶水,必要的时候可以用牙签之类的工具蘸着胶水涂到要粘贴的部位。假如不是特别必要的,不要用502胶水粘贴电机的外壳等部位。
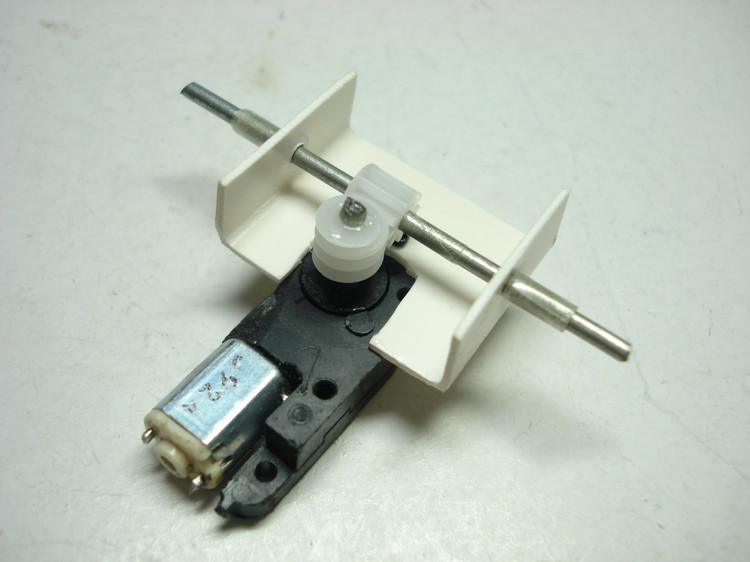
把减速电机和减速箱外壳用M1.2螺丝固定起来。
减速箱两侧的输出轴,用透明胶布缠绕几圈用于安装限位。
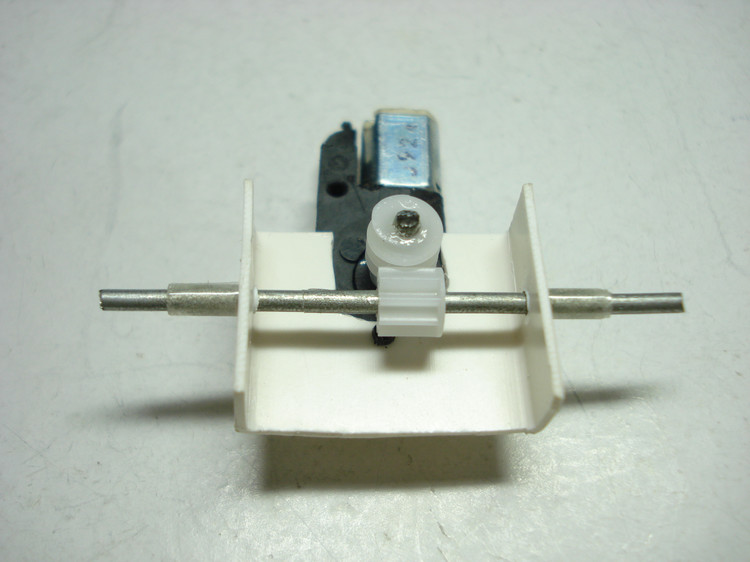
改造好的减速电机。
剪两块长2.5CM、宽2CM的PVC方块,作为支架。
在支架上如下图所示的位置开两个槽位。
在开好的槽位两侧再用锥子打两个孔。
把支架立在减速箱外壳两侧,在减速箱外壳上对着支架的小孔的位置也打好安装孔。
用M1.2的螺丝螺母把支架与减速箱外壳固定在一起。

这是PVC-Robot 13号A版机器人的制作过程,A版的动力系统是通用具体见前一章节
动力系统。接下来是除了动力系统外继续介绍A版其他部分的制作过程。
剪一块PVC方条,大小正好可以如下图所示搭在减速箱外壳底部,用于把减速箱安装到电池盒上时垫底之用。
可以用透明胶布把该PVC方条粘贴固定在减速箱外壳底部上。
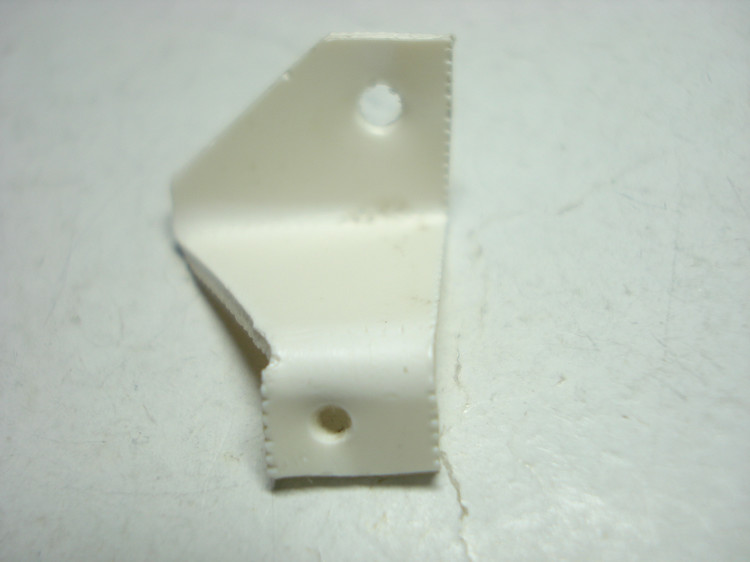
再剪一块长6CM、宽1CM左右的PVC方条,用尖嘴钳折成如下图所示的形状。

在方条和减速箱上都打一个小孔,用M1.2螺丝螺母固定起来。
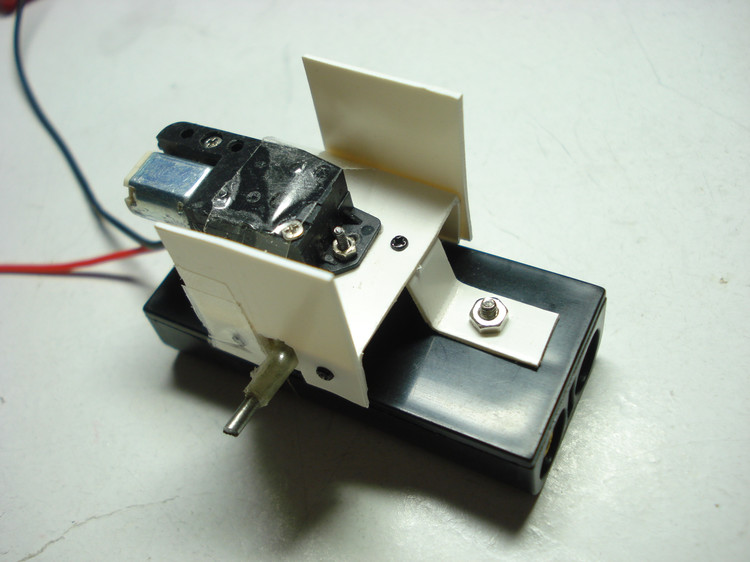
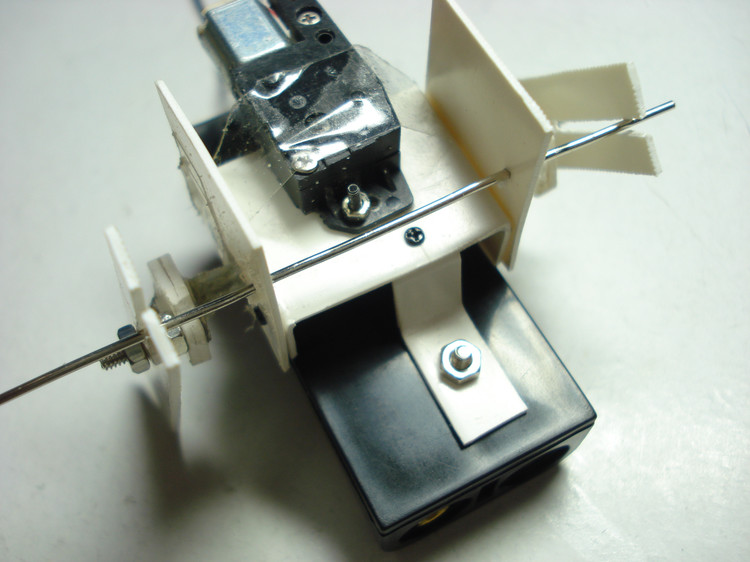
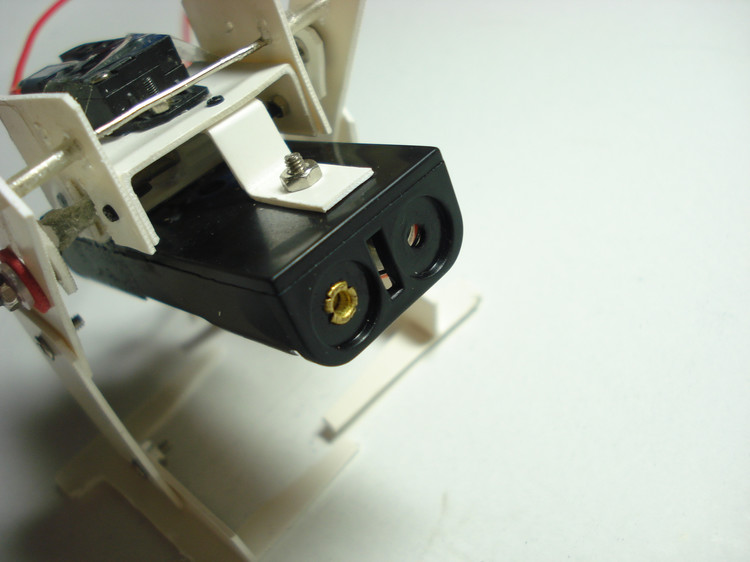
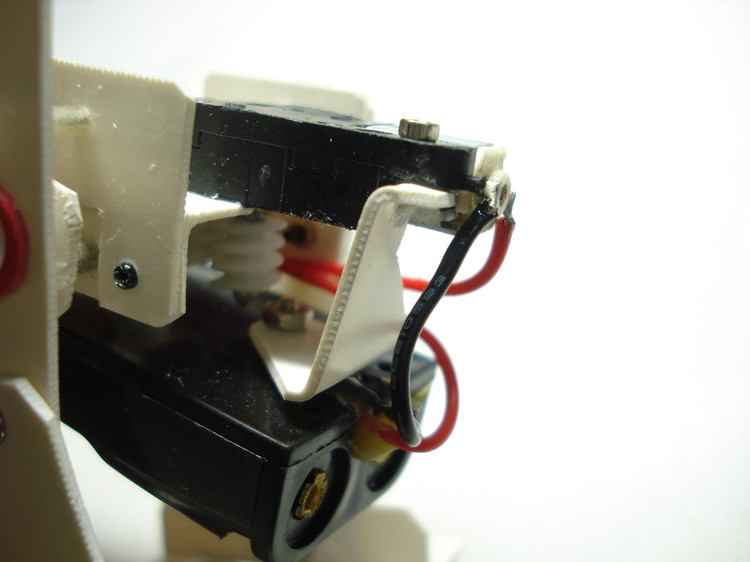
把装有减速电机的减速箱如下图所示安装到电池盒背面上。
减速箱有方条的一侧,对着电池盒的安装孔打一个2CM左右的孔,用M2螺丝螺母把减速箱和电池盒固定起来。减速箱有减速电机的另一侧,用透明胶布粘贴在电池盒上。对于PVC方条长出的部分,用剪刀剪掉。
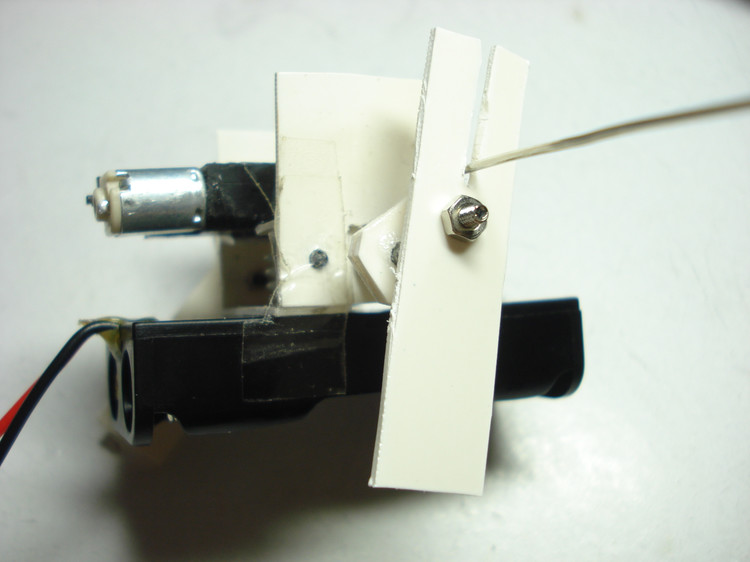
假如减速电机上连着蜗杆的短轴太长了,高出减速箱外壳的底部,则就无法如上面所述的那样在减速箱外壳底部增加一个垫底的PVC方条。我们就需要在减速电机的尾部增加一个支架。
用支架把减速电机和电池盒连接起来。
支架与电池盒用M2的螺丝螺母固定。
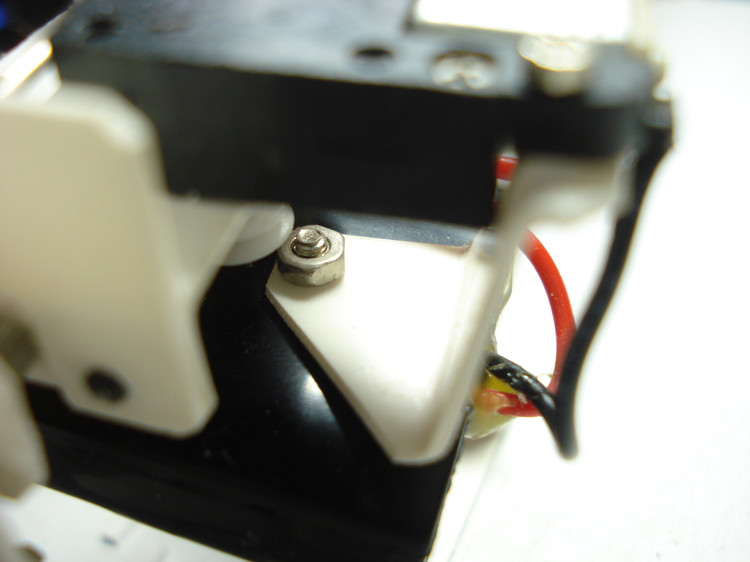
支架与减速电机尾部用M1.2的螺丝螺母固定。
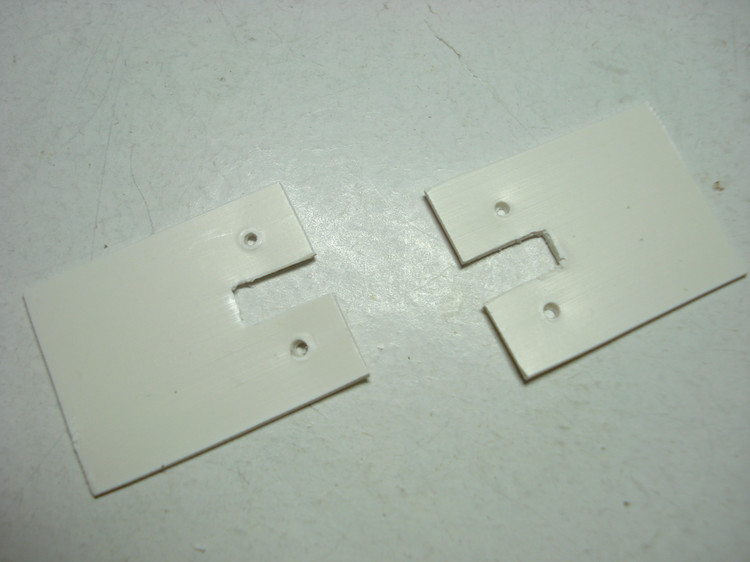
先制作“曲柄”。剪两块长1.5CM、宽1CM的PVC方片,如下图所示紧邻着打两个小孔,其中一个用M2*10的螺丝穿过,并用M2的螺母固定。
把制作好的曲柄套到减速箱输出的转轴上。特别注意:曲柄上有螺丝突出的一侧向外,并且两个曲柄的安装方向要完全相反,即一个完全向上(左),则另一个完全向下(右)。
然后用502胶水把转轴与曲柄的接合部位固定起来。
特别提醒:由于502胶水渗透性强,干得快,使用时要格外小心,如果没有控制好用量,轻则会把不该粘住的东西粘起来了,严重的有可能会导致器件的损坏报废,一般建议使用前先试一下会不会出水孔过大一次性会滴出过多胶水,必要的时候可以用牙签之类的工具蘸着胶水涂到要粘贴的部位。
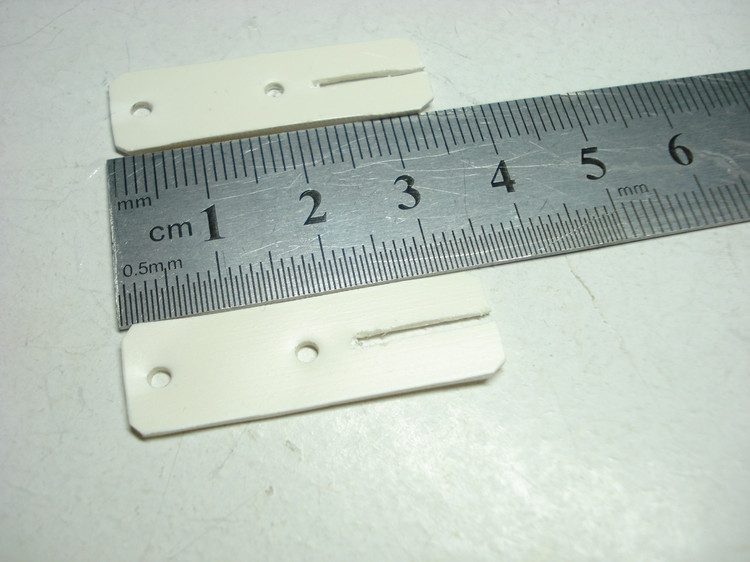
剪两块长4.5CM、宽1CM左右的PVC方条,作为“大腿”。
其中再离其中一侧2.5CM的地方用锥子打一个直径2mm的小孔,再用剪刀从另一侧剪开一个长1.5CM、宽0.2CM的槽位作为曲柄连杆的滑槽。
在减速电机外壳所连接的支架上,对着减速箱输出轴前上方位置,打两个小孔,中间用作为限位杆的拉直后的曲别针穿过。
把“大腿”尝试安装到曲柄上,并把限位杆扣入到“大腿”槽位的中。
沿着限位杆上,减速箱外壳与“大腿”滑槽之间,存在空隙,用透明胶布绑上多几层做成一个垫圈杆,可以确保“大腿”摆动是在一定的范围内的。
把两侧长出的限位杆曲别针,用尖嘴钳截短一些,然后在限位杆与减速箱支架小孔结合的部位,可以涂上少量502胶水把限位杆固定起来。
特别提醒:由于502胶水渗透性强,干得快,使用时要格外小心,如果没有控制好用量,轻则会把不该粘住的东西粘起来了,严重的有可能会导致器件的损坏报废,一般建议使用前先试一下会不会出水孔过大一次性会滴出过多胶水,必要的时候可以用牙签之类的工具蘸着胶水涂到要粘贴的部位。
剪两块大约长2.5CM、宽1.5CM的PVC方条,做成“小腿”。
把“小腿”与“大腿”用M2*6的螺丝固定在一起。
由于造型上的需要,实际“小腿”比“大腿”还粗。
在用曲别针做成的限位杆外侧,用透明胶布缠绕多圈形成一个胶套,胶套最外侧可以滴一点502胶水固定住,防止曲柄的滑道偏离预定轨道。
选一块宽度大约是 2.5CM的PVC线槽,用剪刀截出长约3.5CM的一段。
把PVC线槽的凹槽部分剪掉。
再剪成两个部分。
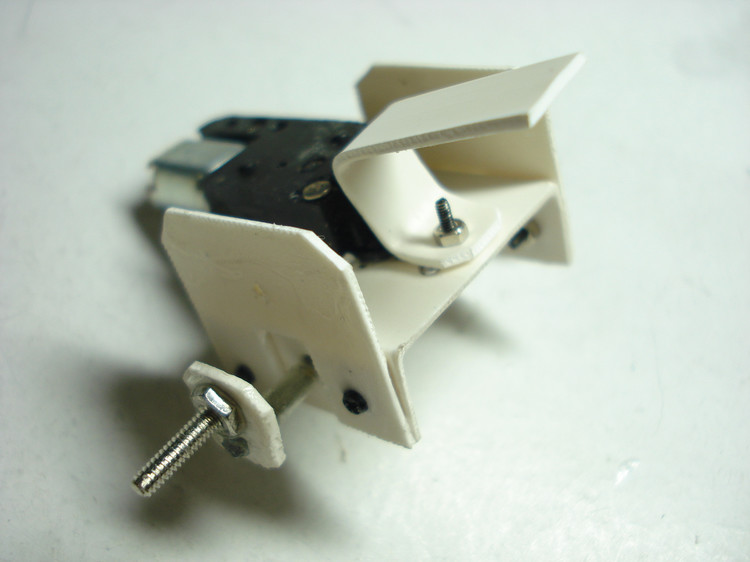
继续用剪刀和锥子加工成如下形状,也就是做成“脚掌”。
把“小腿”与“脚掌”也用M2*6的螺丝螺母固定在一起。
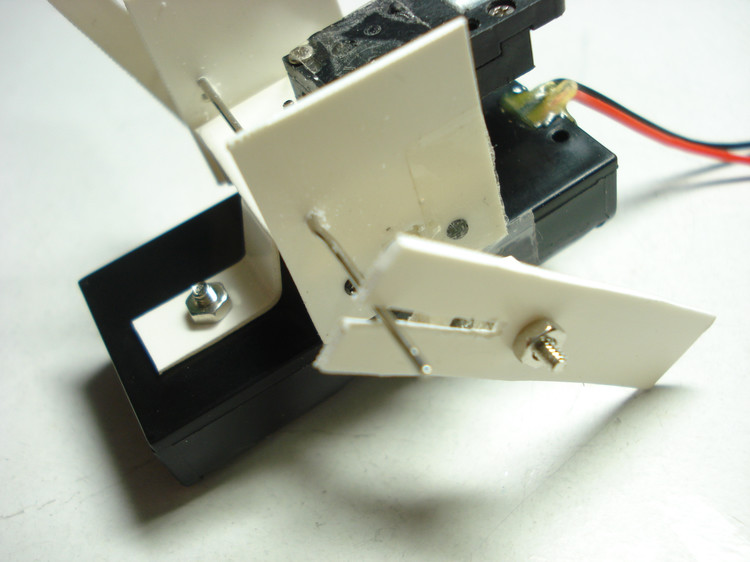
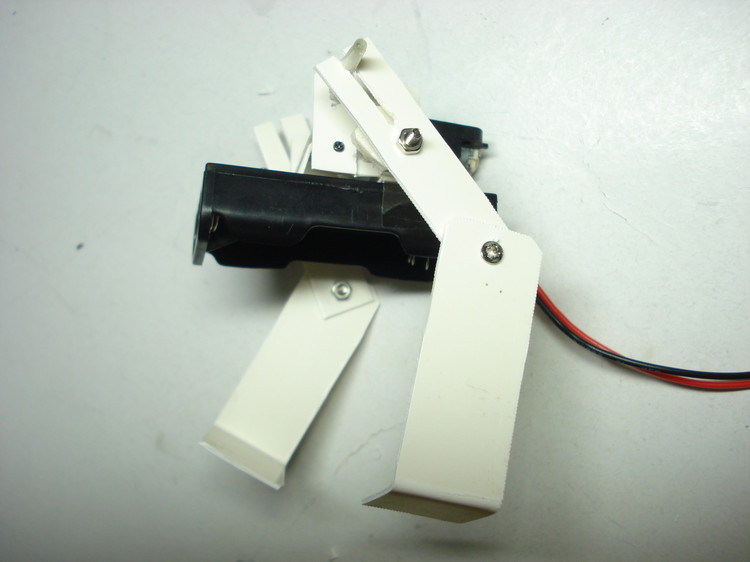
把大腿、小腿 、脚掌等部分都连接在一起。
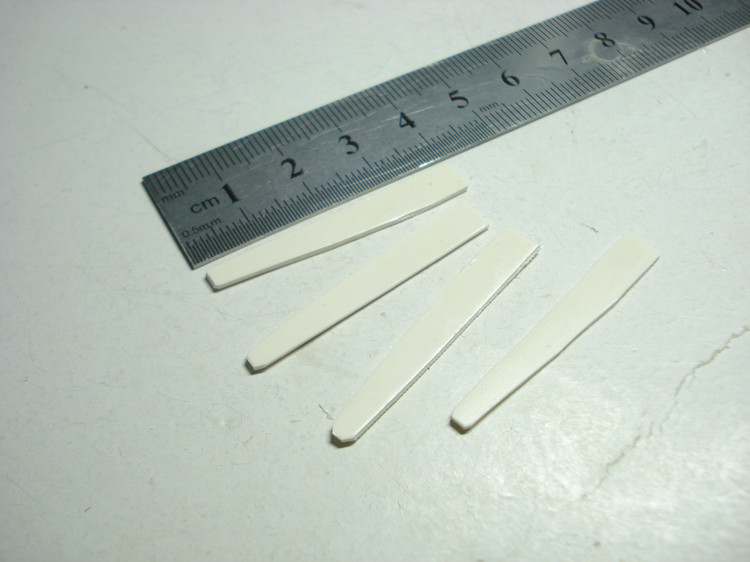
再剪4块 长4CM、宽0.5CM左右的方条,作为“脚掌”延伸出来的“脚指头”。
把“脚指头”直接用502胶水粘贴在“脚掌上”。
特别提醒:由于502胶水渗透性强,干得快,使用时要格外小心,如果没有控制好用量,轻则会把不该粘住的东西粘起来了,严重的有可能会导致器件的损坏报废,一般建议使用前先试一下会不会出水孔过大一次性会滴出过多胶水,必要的时候可以用牙签之类的工具蘸着胶水涂到要粘贴的部位。
给减速电机尝试接上电池的电源,确保能够实现基本的迈步动作。
特别注意:有可能两侧“脚掌”上的“脚指头”会碰到一起,导致双脚卡住动弹不得,这个时候可以用剪刀适当的剪掉“脚指头”的前端部分,让双足在迈步时不会让脚指头卡在一起。
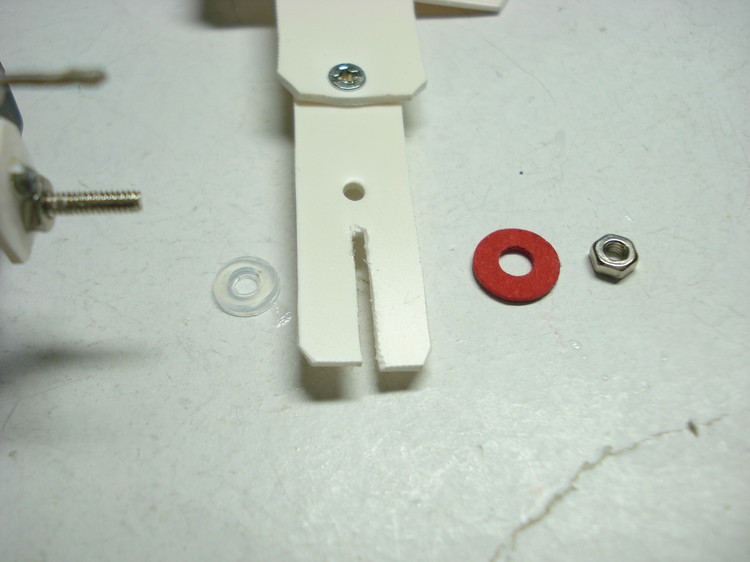
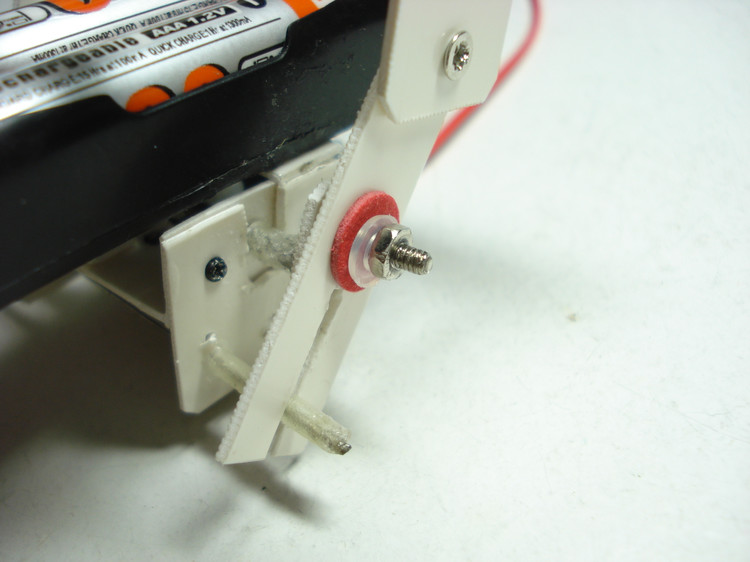
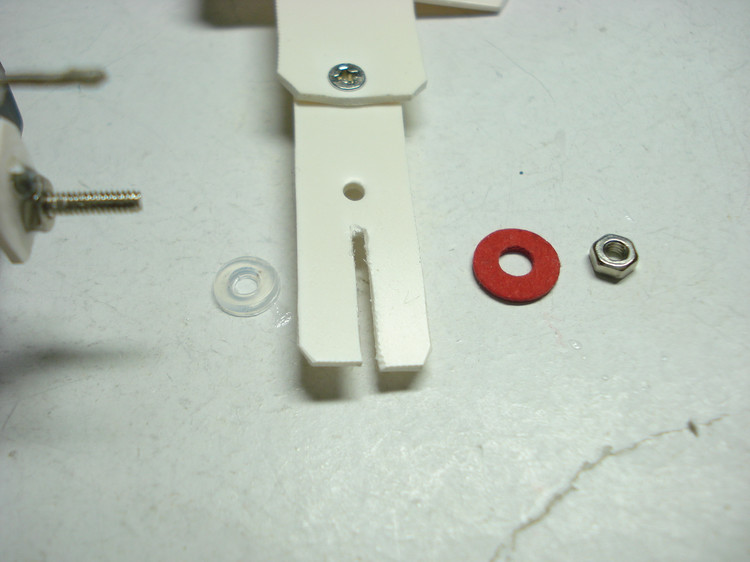
把小腿正式安装到曲柄连杆机构上,曲柄上本身以用M2*10的螺丝螺母固定,然后各关节的接合面上需要借助垫片保持顺滑。
各部件间的接合面,需要用到垫片,也就是说按照“曲柄(带螺母)――M2垫片――小腿――M3垫片――M2螺母”进行安装叠放。
假如曲柄上的螺母安装的不是很正,或者小腿上的孔打得过大了,则建议采用以上这样的安装方式,即曲柄螺母和小腿之间用一个M2螺母隔开。
另外,也可以按照“曲柄(带螺母)――小腿――M3垫片――M2垫片――M2螺母”进行安装叠放,即M2垫片和M3垫片是贴在一起的,主要是在兼顾功能的情况下考虑外形效果,不至于让M3垫片的孔漏出来影响美观。
然后,最外侧的M2螺母要上好位置。
注意:螺母不能上得太紧,否则会让脚卡住无法迈步;但也不能太松,否则会导致迈步时左右摆动过大而站立不稳。
最后,用少量502胶水涂在最外侧M2螺母与螺丝之间,让螺母的位置固定下来不至于在活动过程中松动或者扭紧。
特别提醒:由于502胶水渗透性强,干得快,使用时要格外小心,如果没有控制好用量,轻则会把不该粘住的东西粘起来了,严重的有可能会导致器件的损坏报废,一般建议使用前先试一下会不会出水孔过大一次性会滴出过多胶水,必要的时候可以用牙签之类的工具蘸着胶水涂到要粘贴的部位。
根据电路原理图或者焊接示意图,把电路连接好。
作为测试,连接电路时,导线先不要裁剪,直接先按照原始长度连接起来(等调试确认电路没有问题之后再剪成合适的长度)。
作为装饰,可以把两片M3垫片用502胶水贴在电池盒的圆槽上,作为机器人的眼睛。
电源开关可以用少许502胶水粘贴在尾部电池盒上。
特别提醒:由于502胶水渗透性强,干得快,使用时要格外小心,如果没有控制好用量,轻则会把不该粘住的东西粘起来了,严重的有可能会导致器件的损坏报废,一般建议使用前先试一下会不会出水孔过大一次性会滴出过多胶水,必要的时候可以用牙签之类的工具蘸着胶水涂到要粘贴的部位。
把长出的导线剪短,仅留合适的长度,然后全部再焊接好。
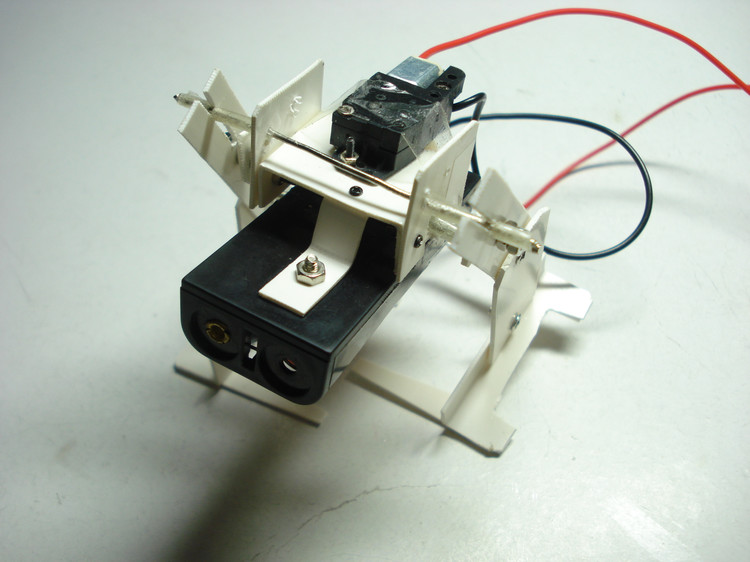
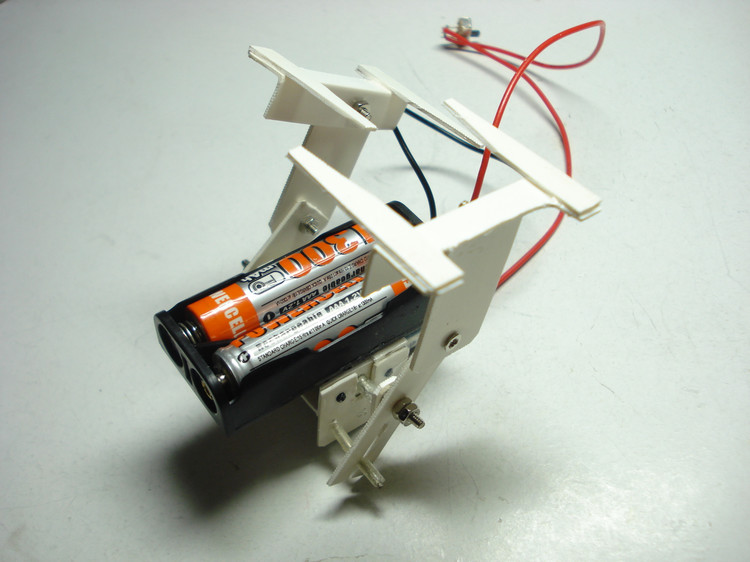
基本的结构和电路都制作完成,可以看到下面的完整造型。
到这里不要以为就结束了,可以试试目前这个阶段的机器人,行走起来多半是走着走着会无法保持平衡而跌倒的。因为还有很重要的一个环节我们没有做――调试。
目前这个结构的机器人,真要能保持平衡的行走下去,通常是需要调整小腿与大腿间的关节,让大腿向后弯曲一些,即让整个机器人的姿态是处于上仰的状态。具体可以边试验边进行调整。
前面的结构,我们把曲柄限位杆是安装在减速箱支架的前上部位,即与减速电机输出转轴是呈一定角度的,这样导致机器人行走时必须是身体(电池盒)上仰的姿势才能保持平衡。
假如我们希望机器人行走时身体不要过于上仰,则可以把曲柄限位杆直接安装到减速电机输出转轴的正上方。
接着前面关于
减速箱支架 部分的内容,在减速电机正上方的位置,在减速箱支架左右两侧各打一个小孔。

把曲别针穿过两个小孔作为限位杆。
注意:两侧的小孔位置要一致,这样才能确保限位杆的位置是端正的。
然后再按照以上
电源系统 的内容继续后面的各环节的制作流程。
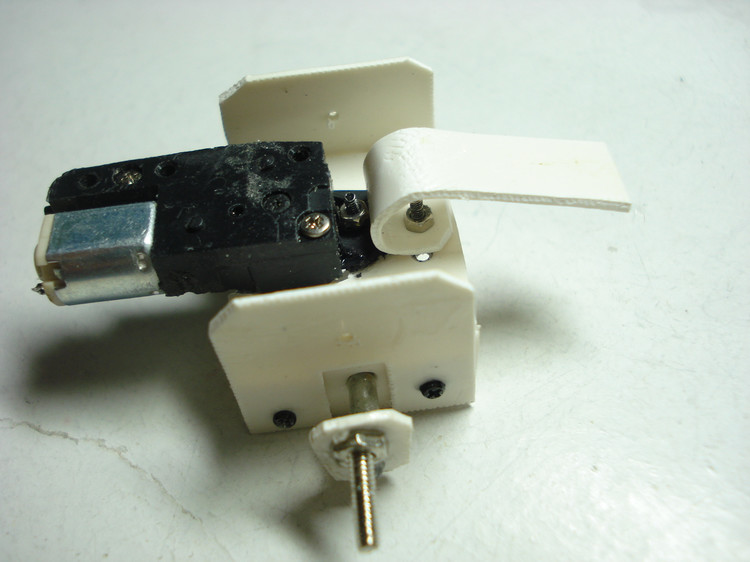
最终调整了限位杆安装位置于减速电机输出转轴正上方的外形结构。
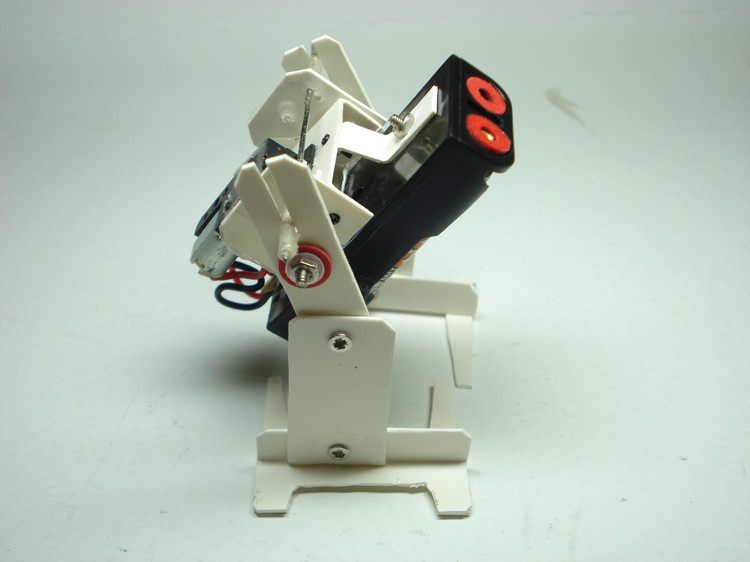
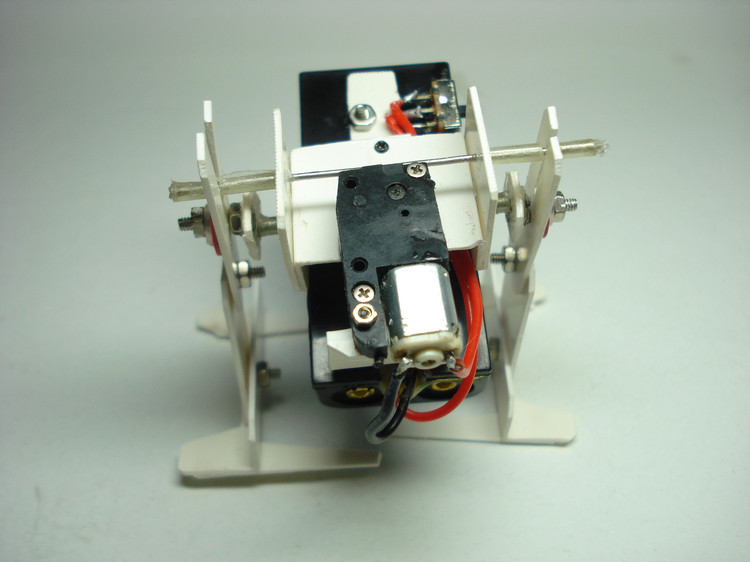
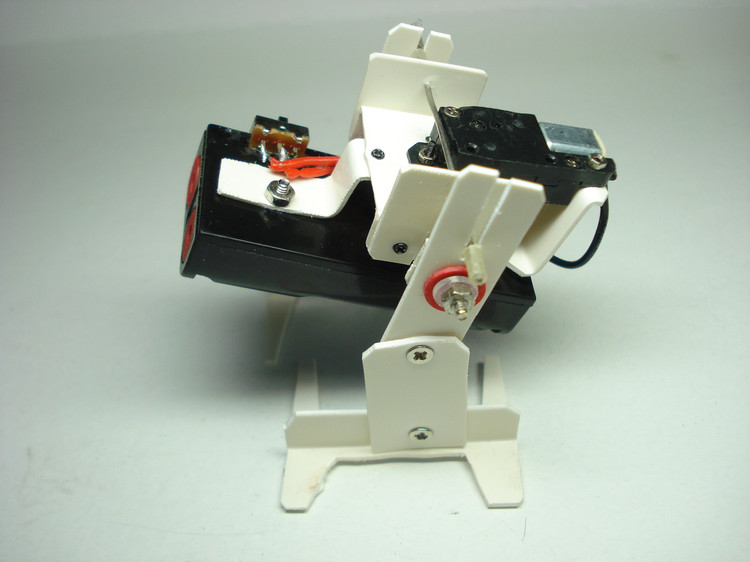
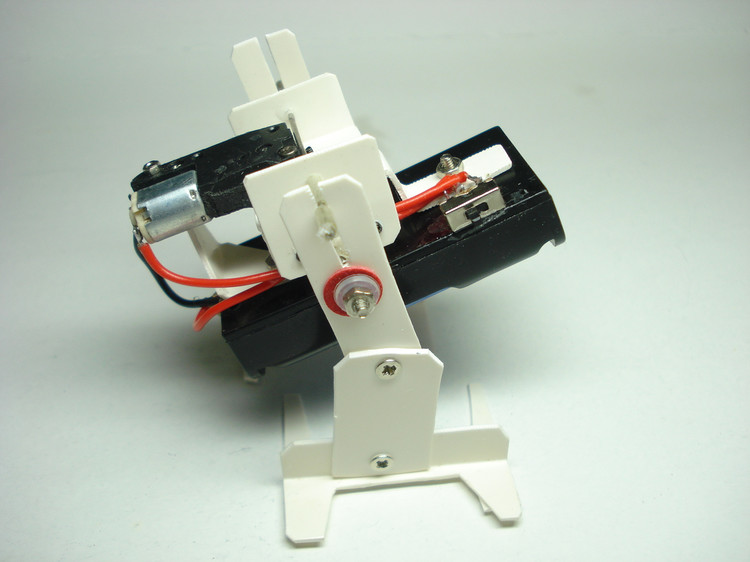
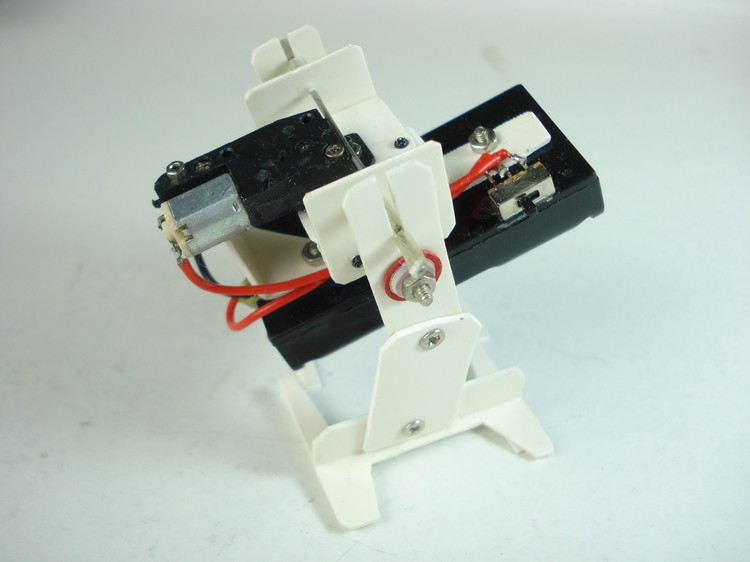
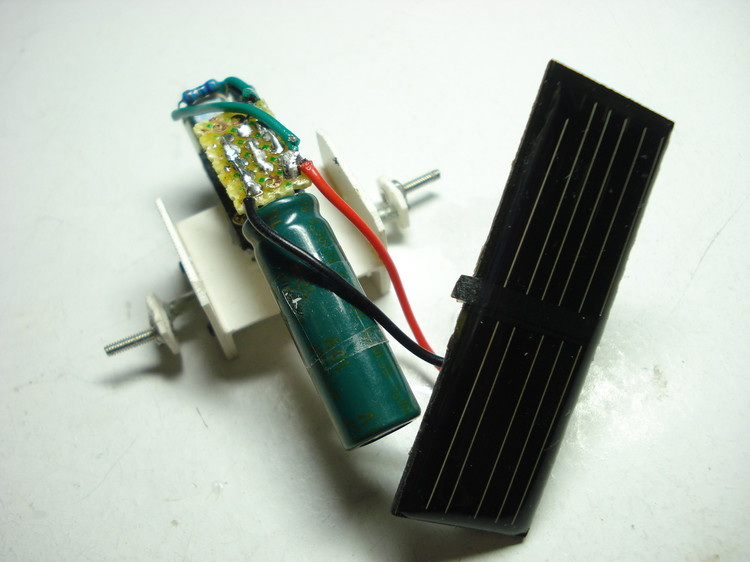
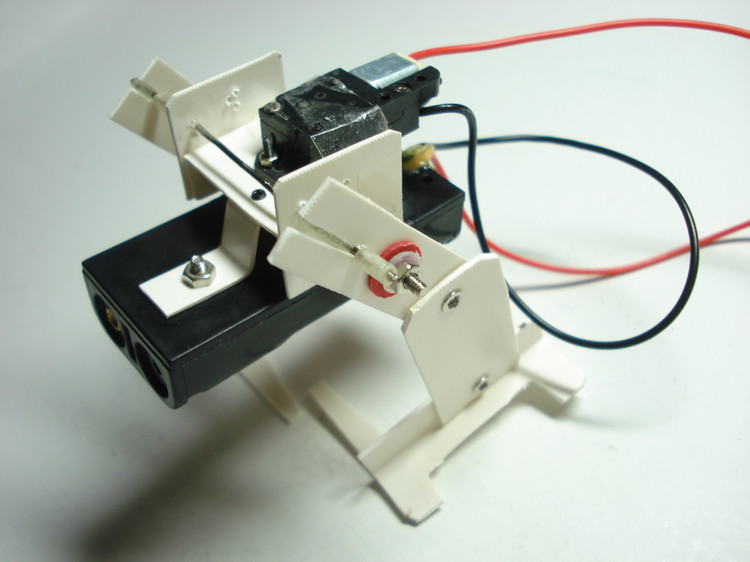
以下是PVC-Robot 13号A版的完成组装后的整体效果。
同一个机器人可以调整限位杆的安装位置,从下图上可以看到减速电机输出转轴正上方的减速箱支架上也有另外的小孔痕迹。
可以看到电源开关安放在尾部。
实际行走时的上仰姿态。
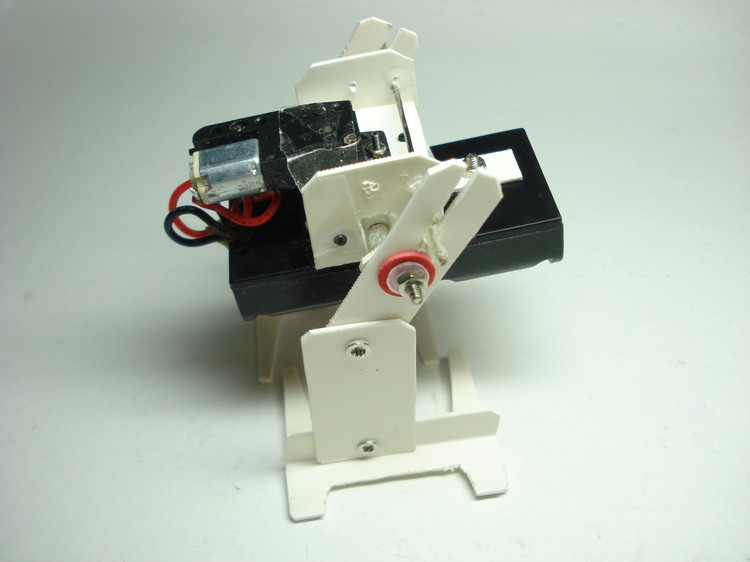
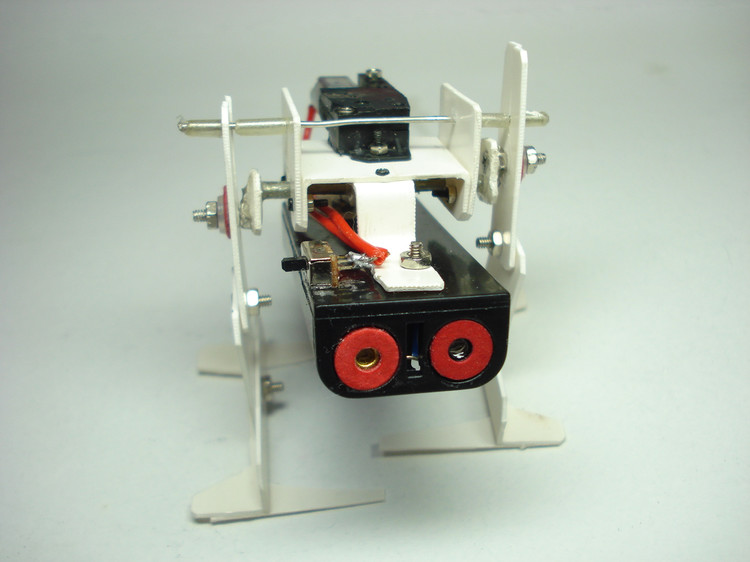
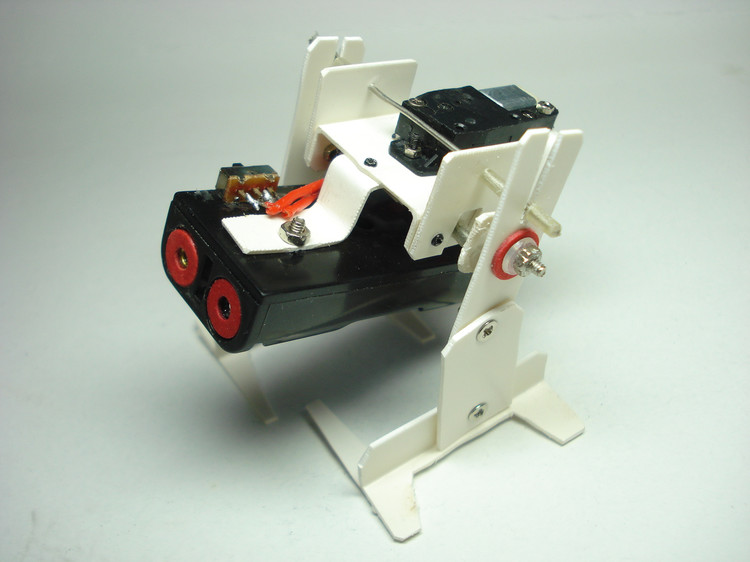
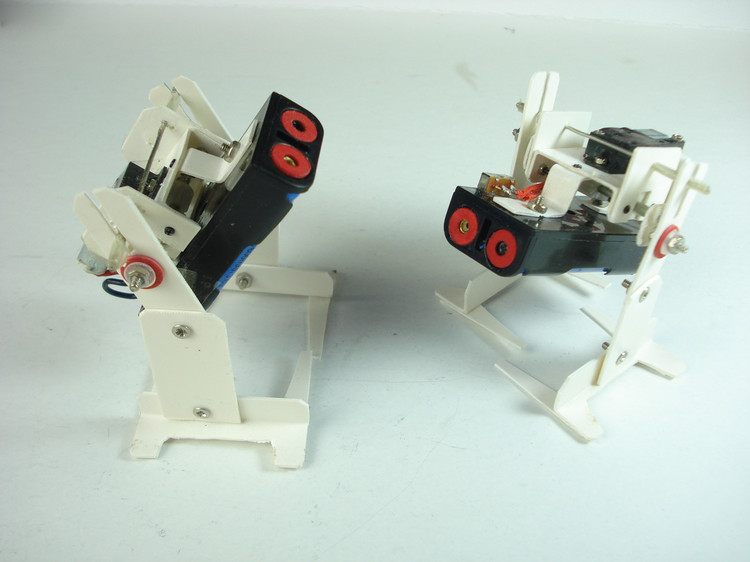
调整限位杆位置后,行走时的姿态相对没有那么上仰。
这个的电源开关是安转在前端的。
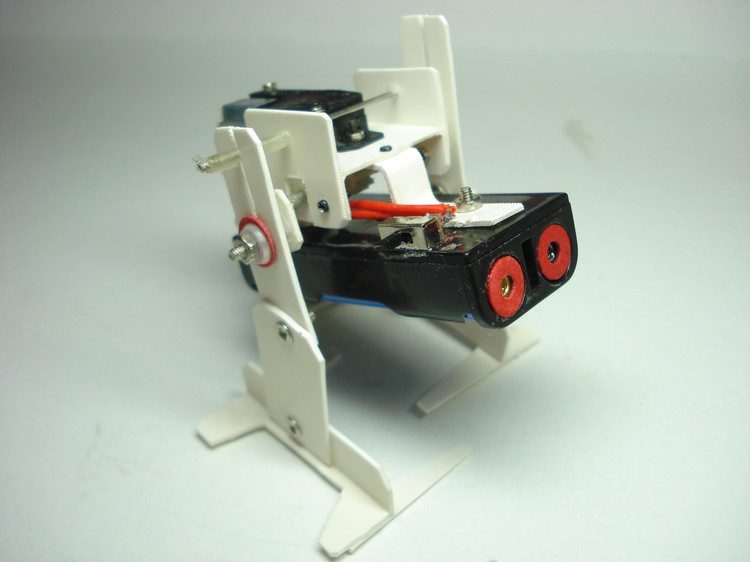
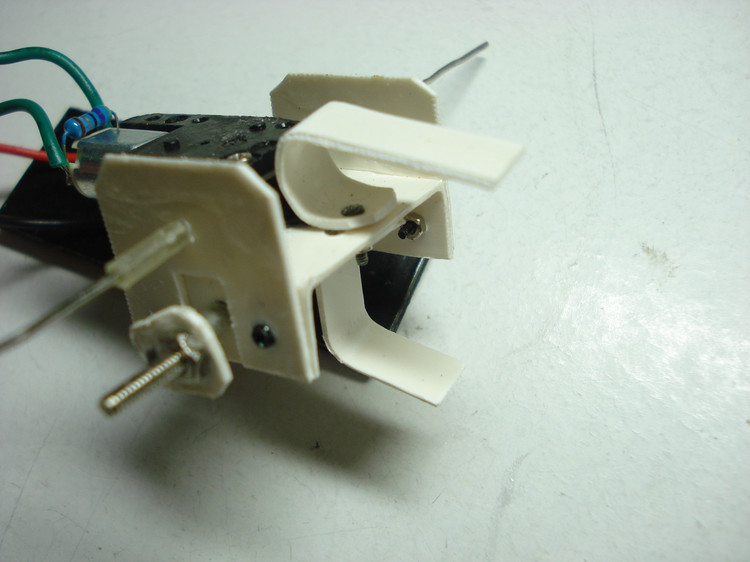
限位杆在不同位置的两个机器人在一起。
这是PVC-Robot 13号B版机器人的制作过程,其中动力系统是通用的,具体见之前的章节
动力系统。
接下来是除了动力系统外继续介绍B版其他部分的制作过程。
先制作“曲柄”。剪两块长1.5CM、宽1CM的PVC方片,如下图所示紧邻着打两个小孔,其中一个用M2*10的螺丝穿过,并用M2的螺母固定。
把制作好的曲柄套到减速箱输出的转轴上。
特别注意:曲柄上有螺丝突出的一侧向外,并且两个曲柄的安装方向要完全相反,即一个完全向上(左),则另一个完全向下(右)。
然后用502胶水把转轴与曲柄的接合部位固定起来。
特别提醒:由于502胶水渗透性强,干得快,使用时要格外小心,如果没有控制好用量,轻则会把不该粘住的东西粘起来了,严重的有可能会导致器件的损坏报废,一般建议使用前先试一下会不会出水孔过大一次性会滴出过多胶水,必要的时候可以用牙签之类的工具蘸着胶水涂到要粘贴的部位。
本项目机器人的控制电路和PVC-Robot 2号机器人项目是基本一样的。
关于电路焊接的说明这不再重复,具体请参考这里:
PVC-Robot 2号电路焊接。
特别的:为了适应在原来标准的太阳能脉动充放电电路的新调整(太阳能电池电压增高、两个LED二极管串联使用),则电路焊接上有一些需要特别提请注意的问题。
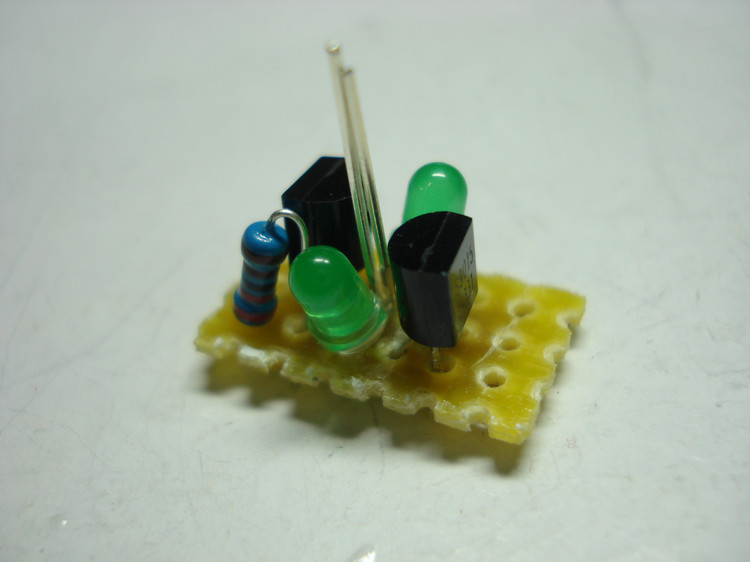
两个LED串联,原来电路板仅是适合一个LED,则要可以把两个LED如下图所示,按照串联的方式把两个LED二极管的相邻引脚引出并用焊锡焊好,而两个LED二极管的另外引脚则按照电路原理图焊接在电路板上。
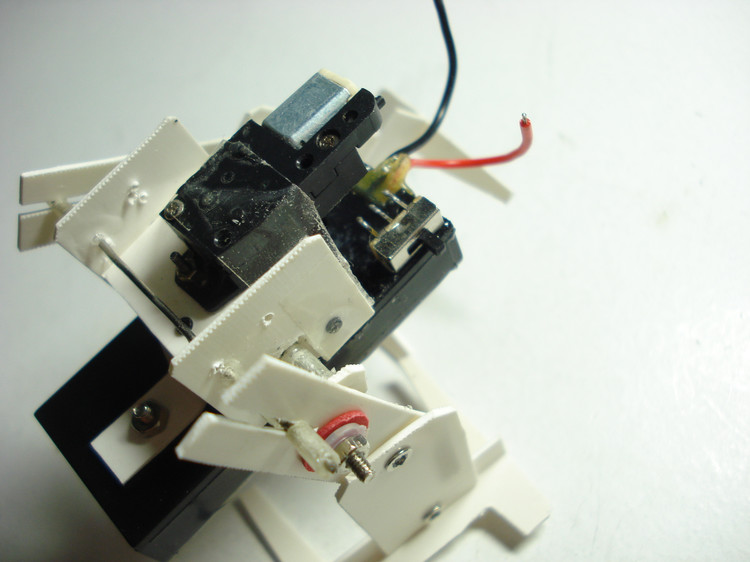
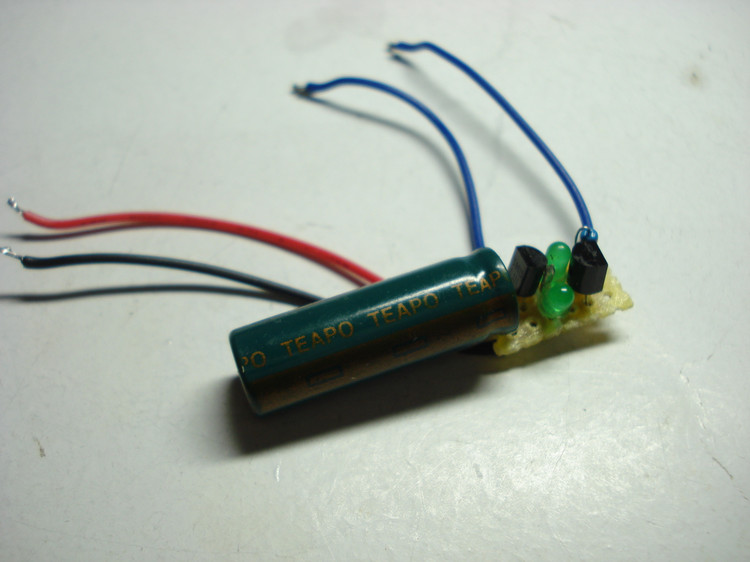
焊接好的电路。
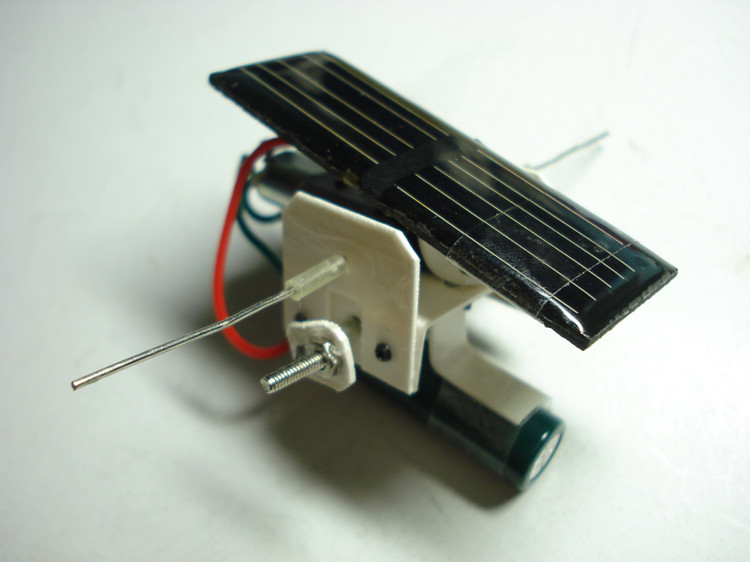
尝试把焊接好的电路板与减速电机、太阳能电池板等连接在一起,正常情况在太阳光下或者高亮度的白炽灯前,减速电机可以有规律的进行间歇转动。
剪一块PVC小方条,弯折成如下图的形状,在上面打一个小孔,并用M1.2螺丝螺母固定在减速箱外壳前端。
同样在减速箱外壳的另一侧,也剪一块PVC小方条折好,在上面打一个小孔,与上面的方条用同一根螺丝固定在一起。
减速箱底部的方条,与控制电路的电解电容用透明胶布绑在一起。而减速箱上方的方条,与太阳能电池板也用透明胶布绑在一起。
剪两块长3.5CM、宽1CM左右的PVC方条,作为“大腿”。
其中再离其中一侧0.3CM和1.5CM的地方用锥子各打一个直径2mm的小孔,再用剪刀从另一侧剪开一个长1.5CM、宽0.2CM的槽位作为曲柄连杆的滑槽。
细心的朋友可能会发现,这里与A版的“大腿”比有点短小,其实这个尺寸不是严格固定有一点差异是正常的,这里之所以短小一些主要也是当前B版的电源是太阳能,相对动力没有A版的那么足,所以可以适当缩短腿部降低对驱动动力的要求(根据杠杆原理,腿短可以适当省力,更多可以参考:
PVC-Robot 11号――机械结构)。
剪两块大约长2.5CM、宽1.5CM的PVC方条,做成“小腿”。
由于造型上的需要,实际“小腿”比“大腿”还粗。
把小腿正式安装到曲柄连杆机构上,曲柄上本身以用M2*10的螺丝螺母固定,然后各关节的接合面上需要借助垫片保持顺滑。
各部件间的接合面,需要用到垫片,也就是说按照“曲柄(带螺母)――M2垫片――小腿――M3垫片――M2螺母”进行安装叠放。假如曲柄上的螺母安装的不是很正,或者小腿上的孔打得过大了,则建议采用以这样的安装方式,即曲柄螺母和小腿之间用一个M2螺母隔开。
另外,也可以按照“曲柄(带螺母)――小腿――M3垫片――M2垫片――M2螺母”进行安装叠放,即M2垫片和M3垫片是贴在一起的,主要是在兼顾功能的情况下考虑外形效果,不至于让M3垫片的孔漏出来影响美观。
然后,最外侧的M2螺母要上好位置。
注意:螺母不能上得太紧,否则会让脚卡住无法迈步;但也不能太松,否则会导致迈步时左右摆动过大而站立不稳。
最后,用少量502胶水涂在最外侧M2螺母与螺丝之间,让螺母的位置固定下来不至于在活动过程中松动或者扭紧。
特别提醒:由于502胶水渗透性强,干得快,使用时要格外小心,如果没有控制好用量,轻则会把不该粘住的东西粘起来了,严重的有可能会导致器件的损坏报废,一般建议使用前先试一下会不会出水孔过大一次性会滴出过多胶水,必要的时候可以用牙签之类的工具蘸着胶水涂到要粘贴的部位。
在限位杆上,减速箱支架与“大腿”之间,“大腿”外侧部分,都用透明胶布多缠绕几圈,做成限位的胶套,把“大腿”适当夹住,以控制双腿摆动的轨迹范围。
把限位杆截短,在最外侧的限位胶套可以滴上一点502胶水把位置相对固定起来,防止曲柄的滑道偏离预定轨道。
特别说明:
开始的时候,B版的脚掌部分,沿用的是A版的设计,即脚掌长度相对短一些(长3.5CM左右)。这样在机器人实际行走时发现,很容易摔倒。
究其原因,B版的总体重量虽然不及A版,但是由于B版的行动缓慢,很多时候都处于半静止状态,所以实际上对平衡的要求更严格。也就是说A版行走较快,很多时候可以通过不断的运动较快的改变身体的姿势――实现动态的平衡,而B版则完全都要在运动的全过程的各阶段都要保持一个静止平衡。
为此,解决的办法就是,给B版装上更大的脚掌。
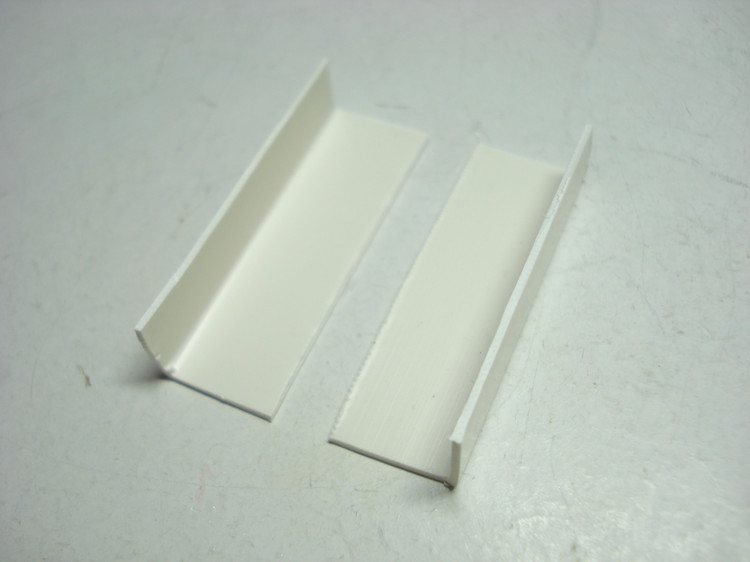
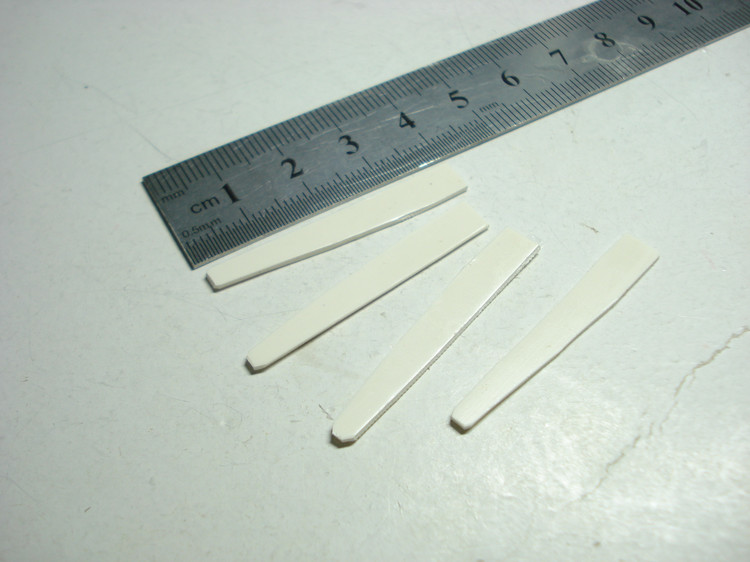
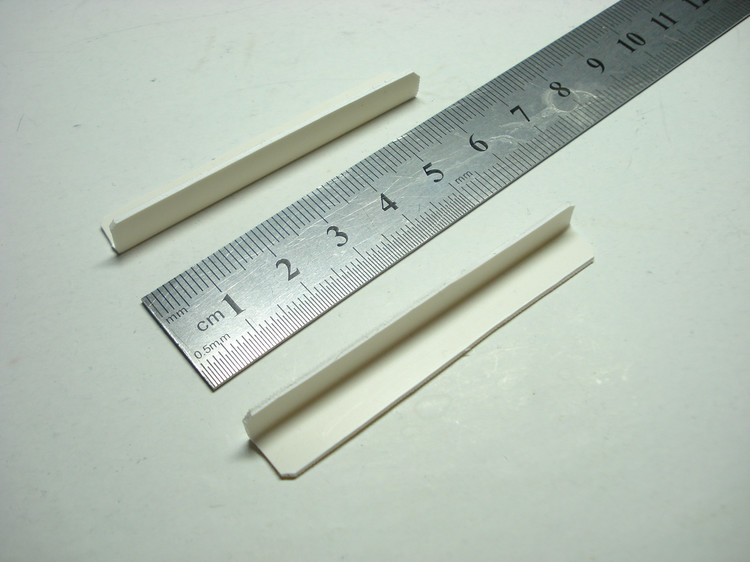
裁剪两段PVC折角长条,大约5CM左右,作为脚掌。注意这个脚掌的造型与A版是有点不同的。
再剪4块 长4CM、宽0.5CM左右的方条,作为“脚掌”延伸出来的“脚指头”。
把“脚指头”用502胶水粘贴在“脚掌”底部。
特别提醒:由于502胶水渗透性强,干得快,使用时要格外小心,如果没有控制好用量,轻则会把不该粘住的东西粘起来了,严重的有可能会导致器件的损坏报废,一般建议使用前先试一下会不会出水孔过大一次性会滴出过多胶水,必要的时候可以用牙签之类的工具蘸着胶水涂到要粘贴的部位。
注意:调整“脚指头”,但不要一下子剪得太多。可以在行走调试过程中,适当逐步剪短“脚指头”,即保证两侧的“脚指头”不碰在一起,又保证不影响身体的平衡。
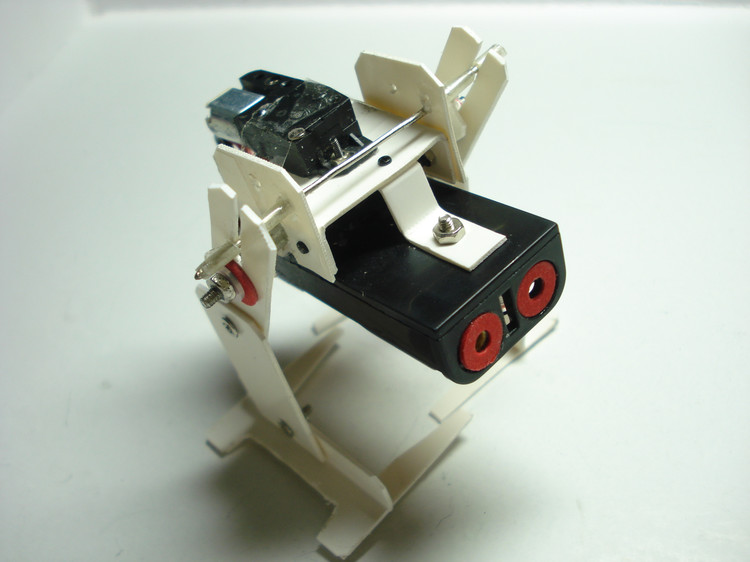
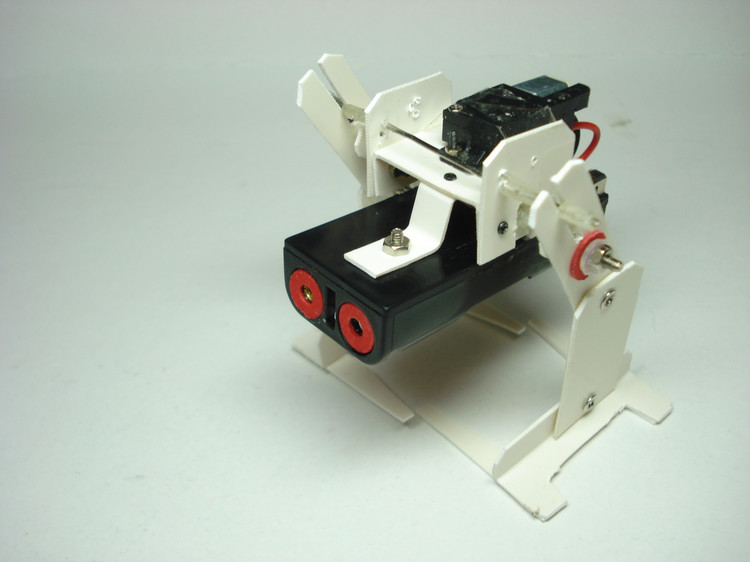
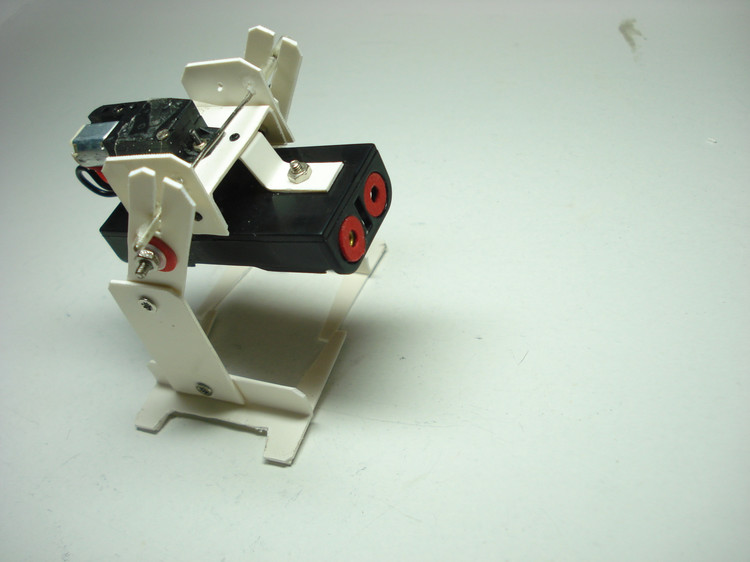
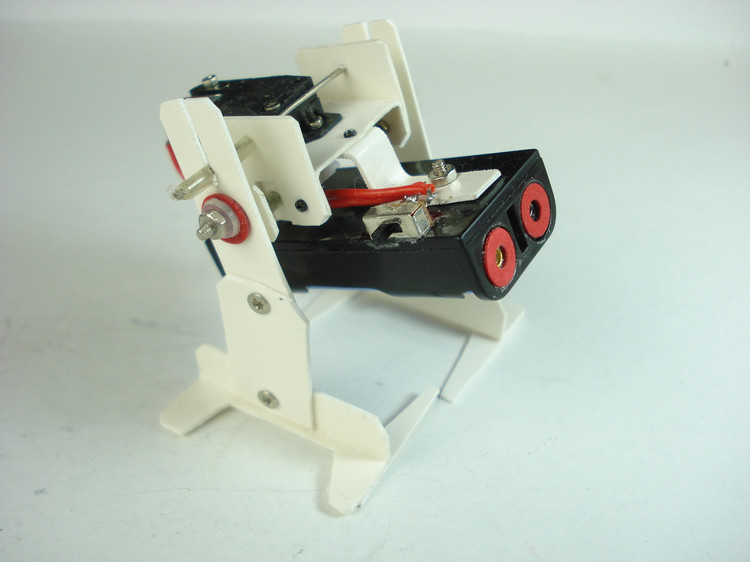
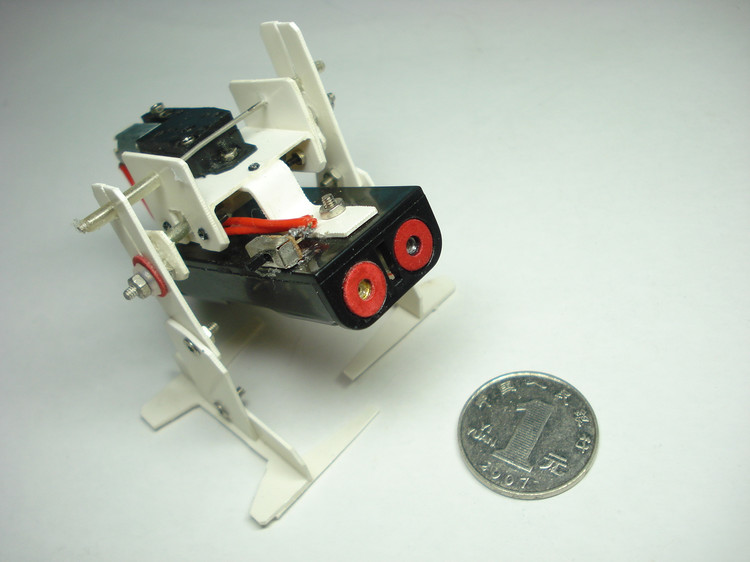
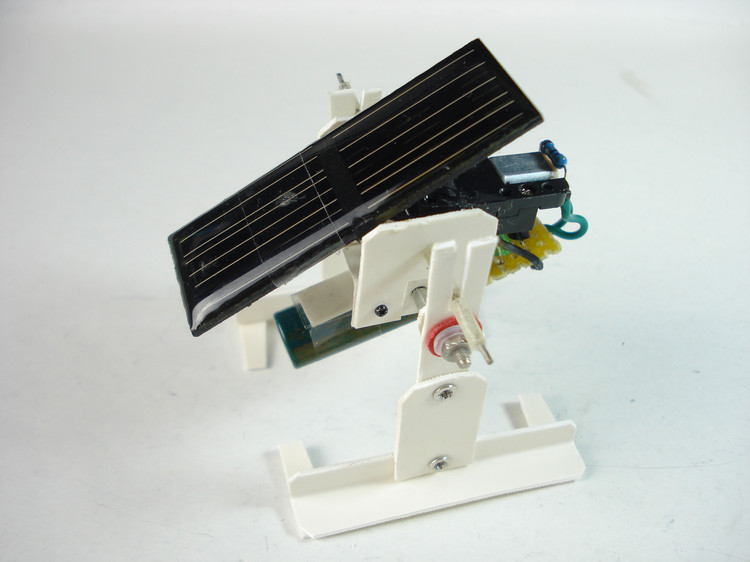
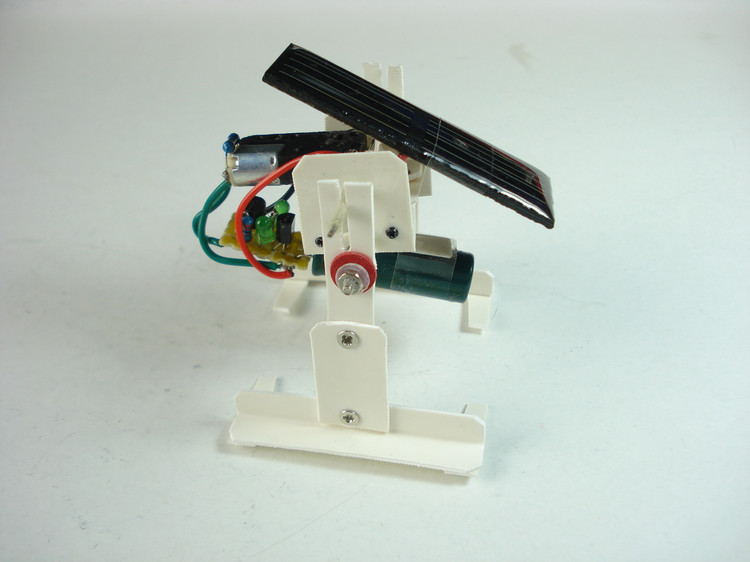
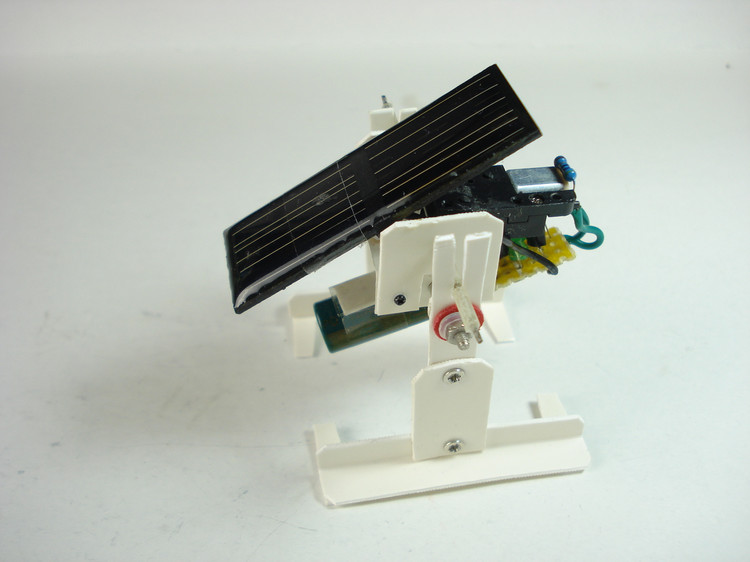
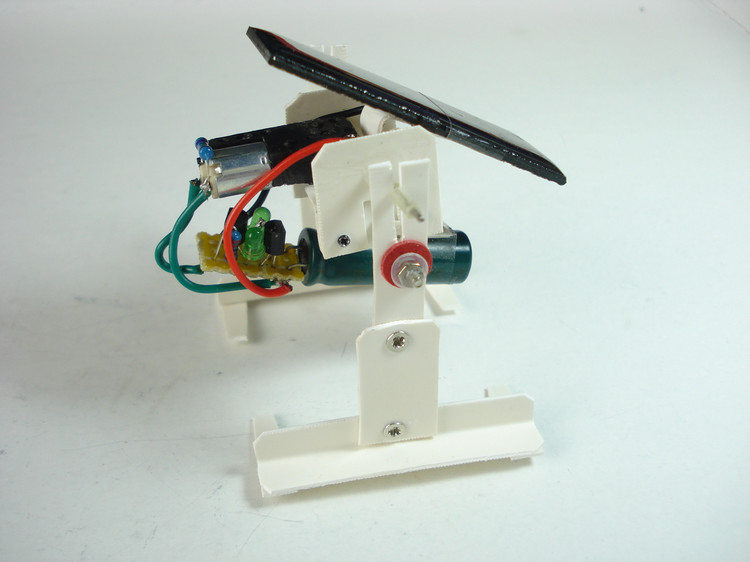
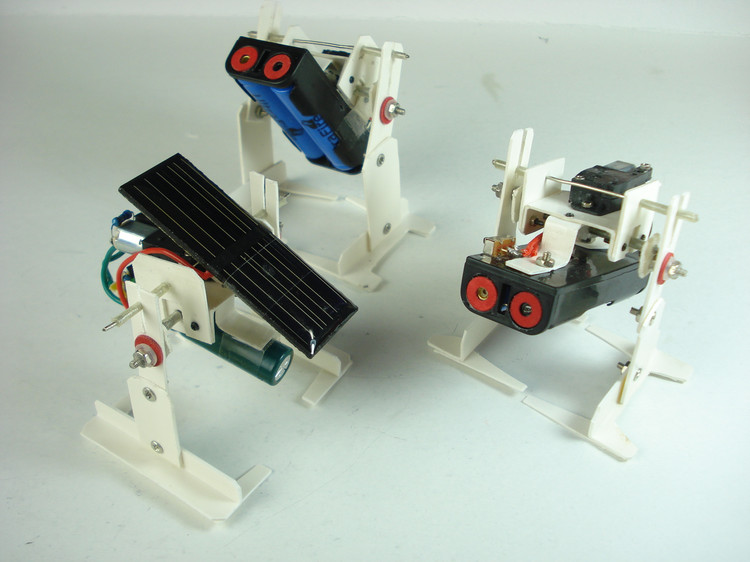
以下是PVC-Robot 13号B版的完成组装后的整体效果。
B版与另外两个不同姿势的A版在一起。
1)动作调试
两个型号的双足行走机器人,按照前进的方向往前迈步,假如调试的过程中发现机器人行走的方向相反了,把连接减速电机的两根导线调换过来就行。
调试A版和B型行走动作时,主要是要调整膝盖关节的角度,确保迈步的整个过程都能够保持身体的平衡,而不至于摔倒。按照经验,以现有的结构,通常需要把双足的大腿部分稍微往后弯曲一点角度,才能较好的保持身体平衡。
2)姿态调试
本项目中,曲柄限位杆安装的位置,决定了机器人行走时姿态。一般要求行走时,限位杆与转轴在垂直方向的同一条直线上,假如限位杆位于转轴的前上方,则机器人重心比较靠前,行走时身体(电池盒)必须是上仰的;假如限位杆正好位于转轴的正上方,则机器人重心相对居中,行走时身体(电池盒)相对没有那么上仰,而是有点俯身的效果。
这两种情况,在以上A版机器人的制作过程中已经有详细说明,具体见:A版――结构更新

3)电路调试
本项目B版机器人对应淘宝店提供的套件,采用的小电机的电流比较小,有可能在太阳光比较强烈的情况下,电机转动了一下就停止了,且电机发出小声的吱吱响,这主要是由于本项目采用的太阳能电池板的电压较高(5V),而电机消耗电流比较小,电路放电的速度赶不上太阳能充电的速度,导致电路一旦导通就无法截止,要解决这个问题可以而在电机两端并联一个几十欧姆的电阻。
本套件另外选配了一个47欧姆的电阻(色环:黄紫黑金棕),假如出现这样的情况,可以按照如下电路图把47欧姆的电阻并联在电机两端(虚线部分)。
具体可以直接把该电阻焊接在电机的两个电极上。 特别注意:该47欧姆电阻(色环:黄紫黑金棕)与2.2k电阻(色环:红红黑棕棕)的色环颜色有明显的区别,千万不要搞混了。
对于本项目B版机器人的太阳能脉动充放电控制电路,正常情况下,在阳光下测试,电机会有节奏的转一阵、停一阵,注意观察还会发现在电机开始转动的瞬间LED会有一点微光闪动。
针对应用当前的太阳能脉动充放电控制电路制作太阳能动力机器人,以下列出可能存在的问题以及解决的方法:
1、电机转一下就停止,电路不再触发。
1)
电机内阻太大:如果是小电流的电机,因为内阻比较大,电解电容充电分压在LED两侧的电压较低不足以让LED导通,解决的办法是可以尝试在电机两端并联一个几十欧姆的电阻。
2)
如果是在强烈阳光下存在这个问题,则是太阳能电池板的电压太高以及电机功率较小的原因:太阳能电池板电压高,而电机功率小而消耗的电流也小,电机放电的速度赶不上太阳能充电的速度,导致三级管一旦导通后就无法截止,解决的办法是可以尝试在NPN三级管基极与PNP三极管集电极之间连接一个1k左右的电阻,使三级管导通的条件提高;另外也可以类似第一种情况在电机两端并联一个几十欧姆的电阻,也就是说可以加大放电时的电流,加速放电。该问题具体请参见:
调试完善
2、电机一直转动,没有节奏性的转/停。
1)太阳能电池板的电压太高:尝试多串联一个LED以提高电路充电阈值上限。
3、电机不转,LED也不亮。
1)太阳能电池板的电压太低:至少要求太阳能电池板额定最高电压能够达到3V;
2)光线不足:需要在足够的阳光下或者白炽灯下进行测试;
3)电路错误:检查电路焊接是否正确。
4、LED常亮,电路不触发。
1)电路错误:检查电路焊接是否正确。
5、电机嘶嘶响,但是不转。
1)储能电解电容容量过大:尝试减小储能电解电容的容量,根据经验一般耐压高、体积大的电解电容用在这个机器人电路上效果最好。
作为一个较为典型的仿生运动机器人项目,通过这个项目我们可以:
1、了解双足行走这种新的机器人运动方式;
2、进一步了解“摆动曲柄滑块机构”这种连杆机构的应用;
3、熟练掌握减速电机改造的基本技巧。
通过本项目,可以积累较多机械结构制作以及运动姿态调试等方面的经验,可以为后续继续深入机器人的DIY活动打好基础。由于本项目机器人的运动方式是比较经典且有趣味性的,可以说对多数人都是有较大吸引力,所以我想不用我多说,大家都已经是跃跃欲试了吧。