控制电路的核心采用AVR单片机的MEGA16芯片,考虑到体积,同时也想有点挑战性,没有直接用现成舵机控制板,而是用核心板准备自己写舵机控制程序。
关于M16核心小板:http://item.taobao.com/item.htm?id=5082211002
电池盒安装在底部,考虑用2节7号大小的锂电池。
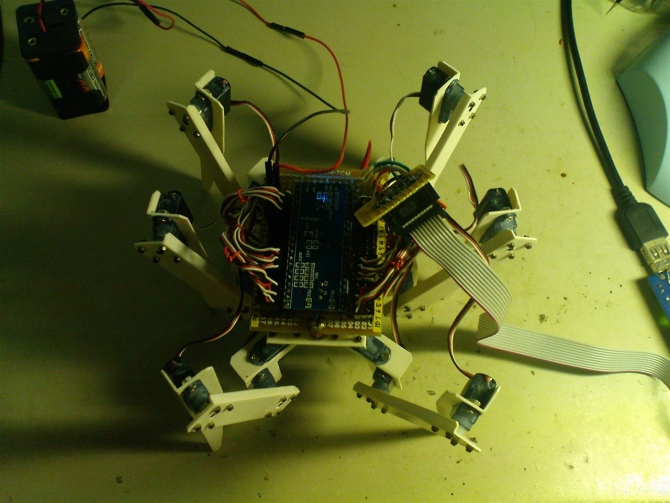
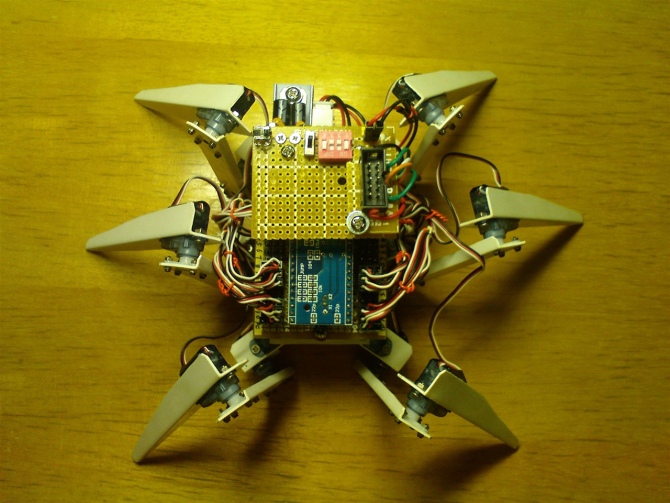
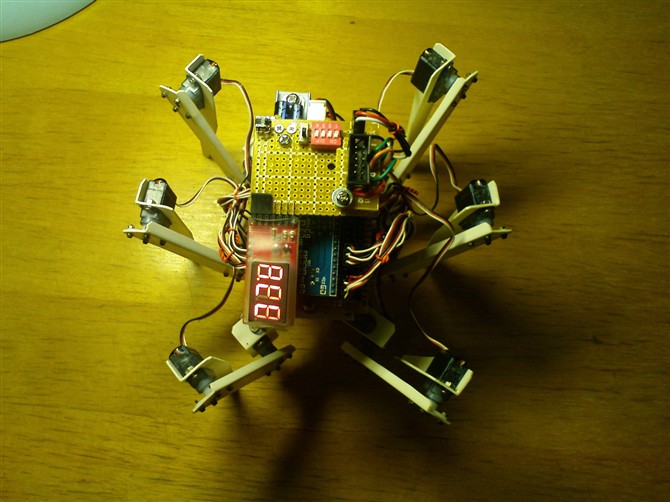
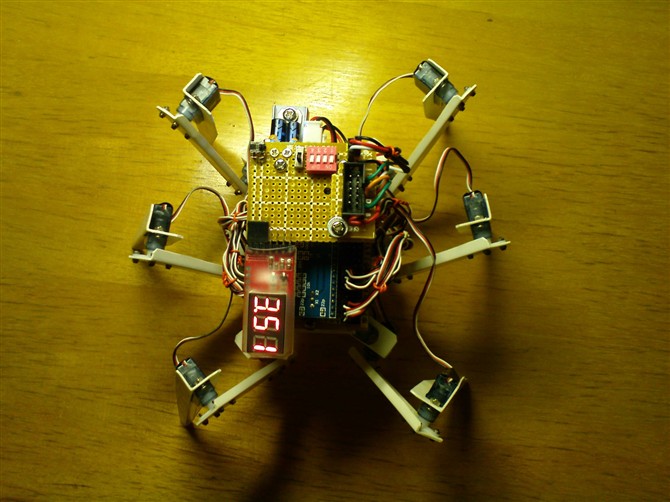
来一个俯视图。
再换一个角度。
2、电路调试
初步完成基本电路的安装,连接电脑烧录程序,进行简单的舵机控制的调试。
确定舵机动作幅度所需要的PWM频率时,用到了舵机测试器:http://item.taobao.com/item.htm?id=2935455936
除了通过USBASP连接电脑之外,电源也暂时是外接的电池组。
3、张牙舞爪
编好固定动作的程序,烧录到电路上,进行简单的动作调试。
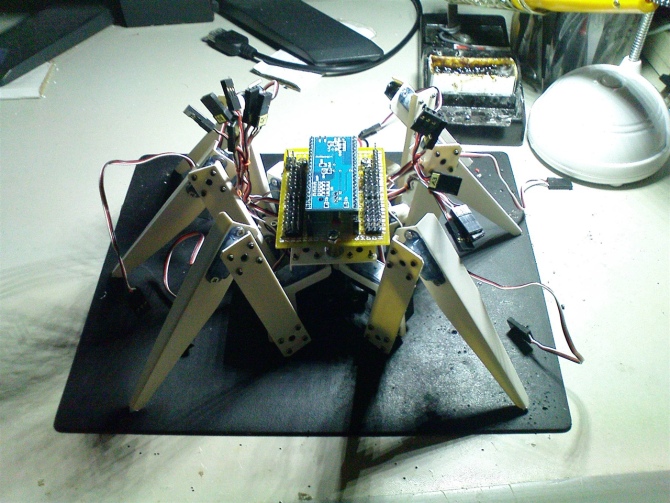
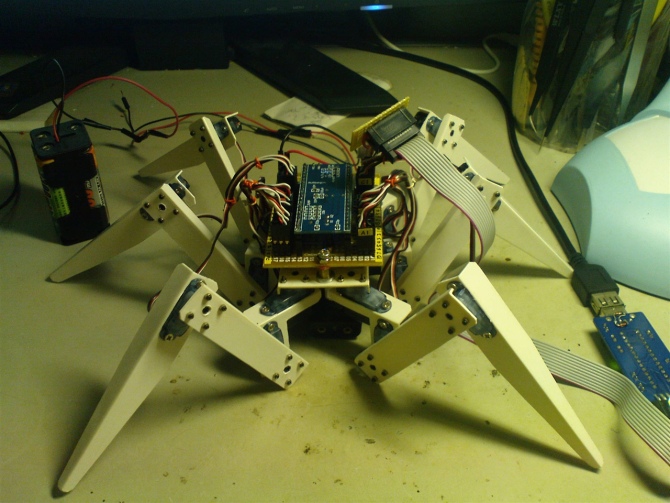
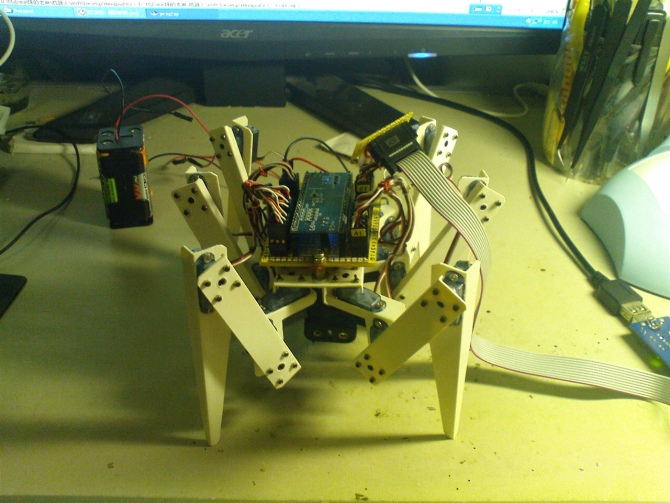
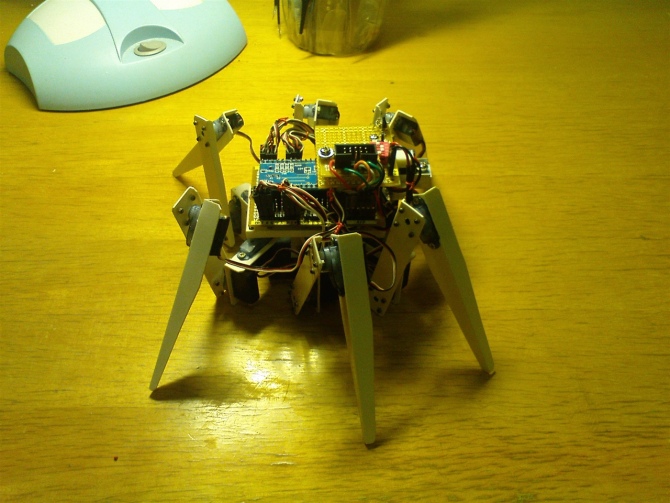
先来一个“张牙舞爪”的动作。
很酷吧,不过肚子还是趴在桌面上的(肚子下面是电池盒以及6只大腿横向关节)。
4、缩成一团
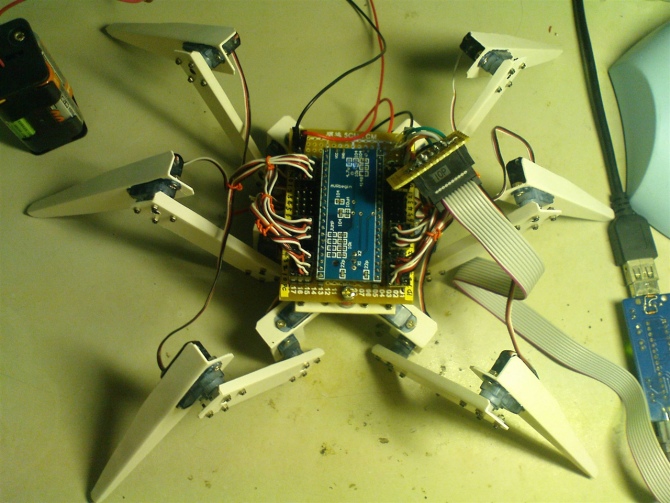
再来一个动作“缩成一团”。
这个动作的名字起得不怎么样,还是靠肚子顶住桌面的。
这是俯视图。
5、站起来了
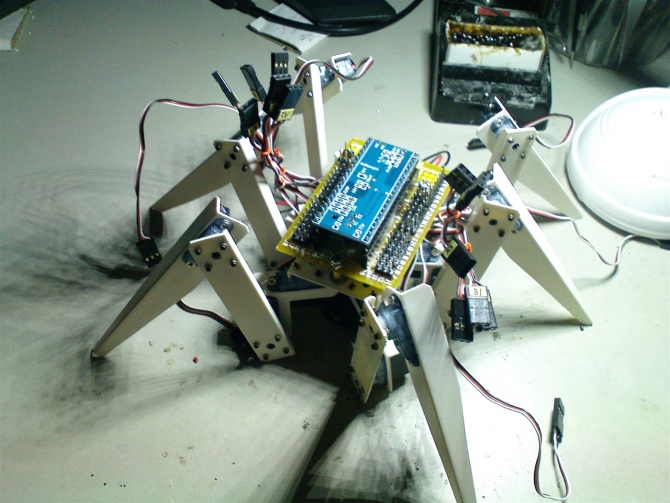
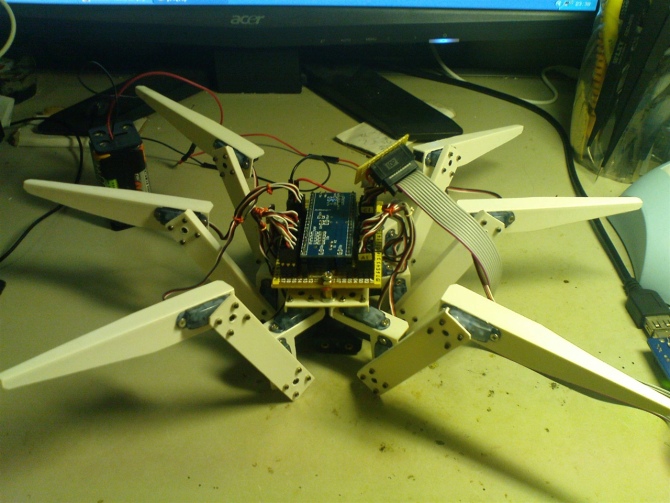
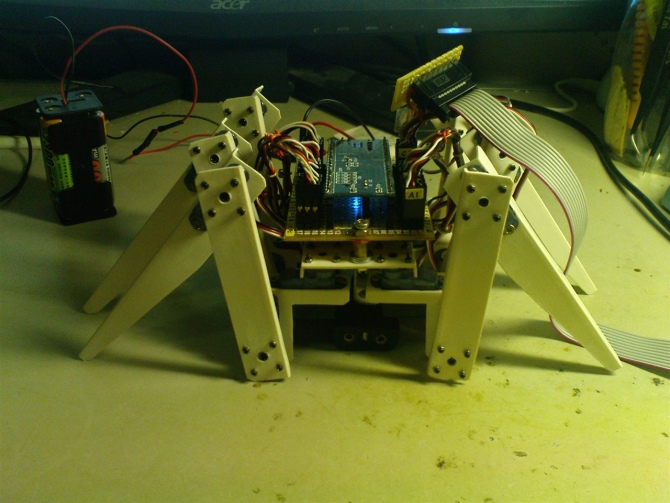
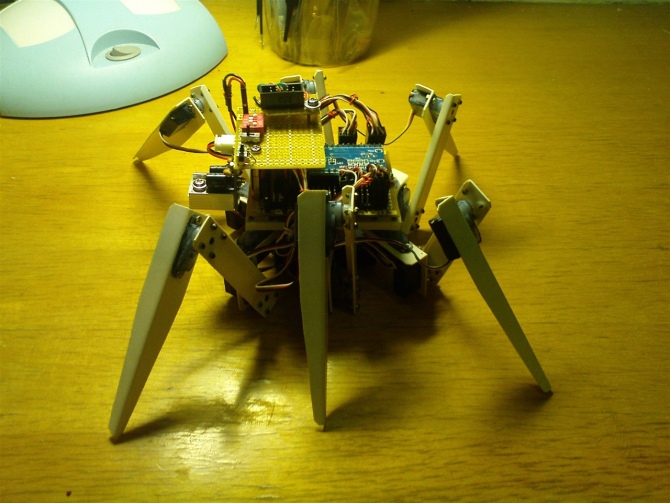
各位观众,接下来是关键的一个动作――从趴着的状态下自行站起来。
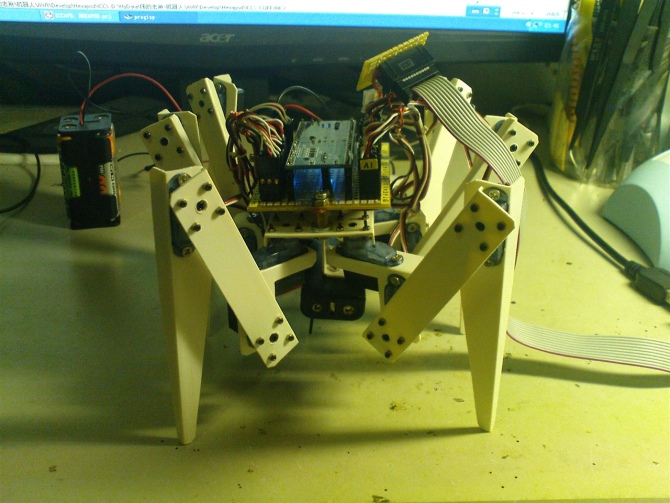
它站起来了!没错,它完全靠自己的力量站起来了!
虽然有点艰难,站起来后还是有点歪歪扭扭的,但终究是站起来了。
(开始一直担心舵机的力量不足,不能自己站起来……)
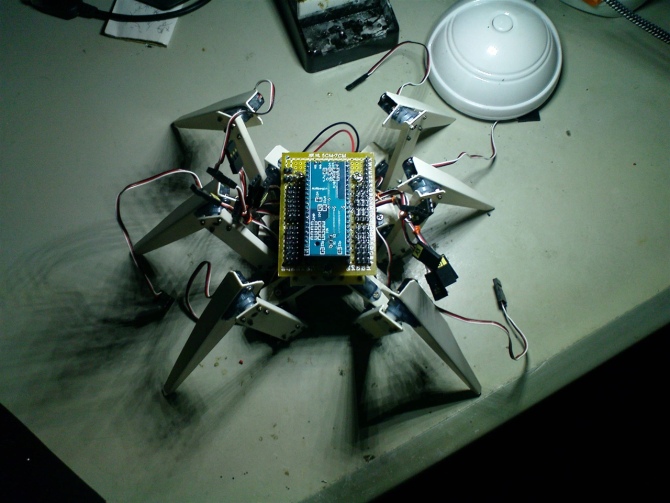
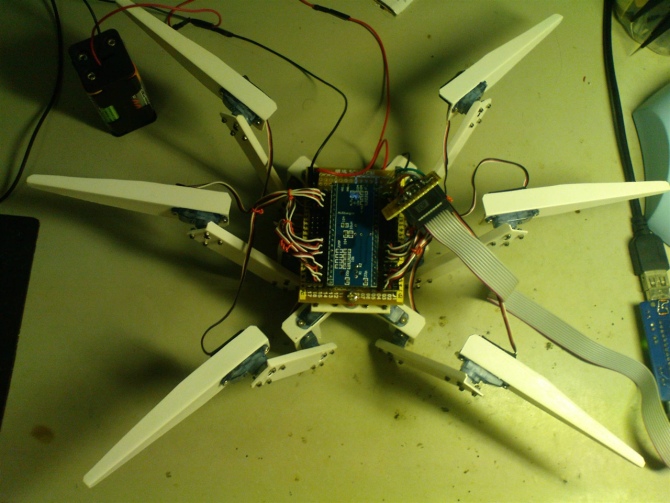
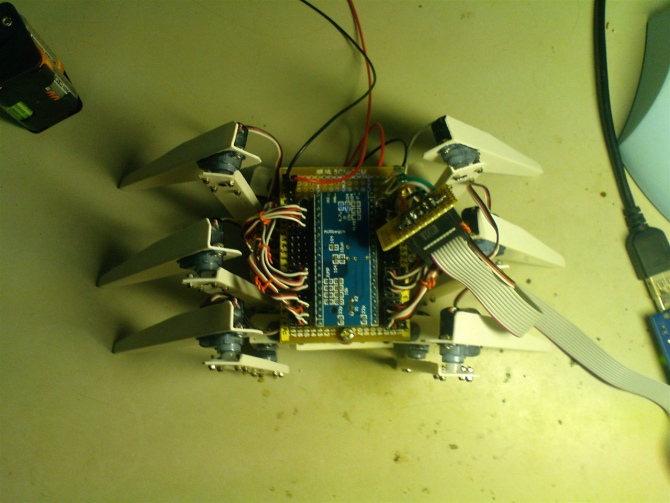
站起来后的俯视图。
舵机的力量确实不足,小腿必须是直的(斜的话撑不起来)。而且虽然站起来了,但是舵机由于力矩偏小,还是有点吱吱的抖动。
这还没有装上电池,希望加上电池的重量后舵机还能顶住。
6、完善供电
本来希望把舵机和单片机的电源完全独立分开,以避免干扰,最后是只用了一个组电池:舵机直接接电池,单片机通过稳压电路连接同一组电池,实践证明中间的稳压电路还是能够很好的实现抗干扰的隔离功能。
舵机供电:
开始曾经考虑过用2节5号镍氢电池通过一个DC-DC大电流升压板的升压到5V给所有舵机供电,经实验后发现完全行不通――18个舵机需要的电流太大了,最后只能考虑直接用2节3.7V的7号锂电串联起来供电。
关于大电流升压板:http://item.taobao.com/item.htm?id=3992246956
关于7号锂电池:http://item.taobao.com/item.htm?id=6142326403
翻过来,可以看到底部的电池。

单片机供电:
单片机本来考虑采用一节7号镍氢电池通过一个块微型DC-DC升压板升压到5V供电,为缩小体积后来也考虑过用3V的CR2032纽扣锂电升压,但实际调试后发现电流也较大一下子就耗光电池了。最后是用一块7805稳压小板直接接到2节锂电上获得5V电压。关于微型升压板:http://item.taobao.com/item.htm?id=4039234002
关于7805稳压板:http://item.taobao.com/item.htm?id=4482971224

7、完善电路
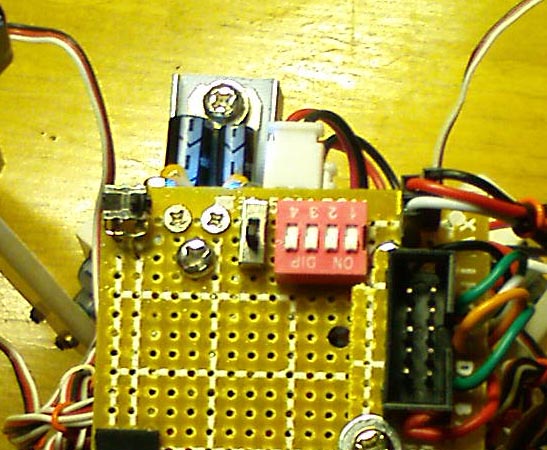
给电路上加上了几个控制开关(总电源、舵机电源、单片机电源、单片机复位)。
接USBASP的10Pin插座也固定在了顶部的线路板上。
另外顶部的电路板留了一些位置,准备以后接传感器用的。

侧视图,可以看得到屁股后面的带散热片的7805稳压芯片。
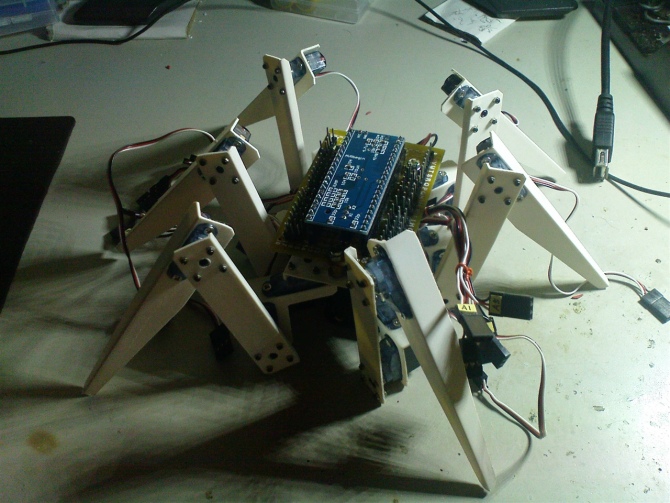
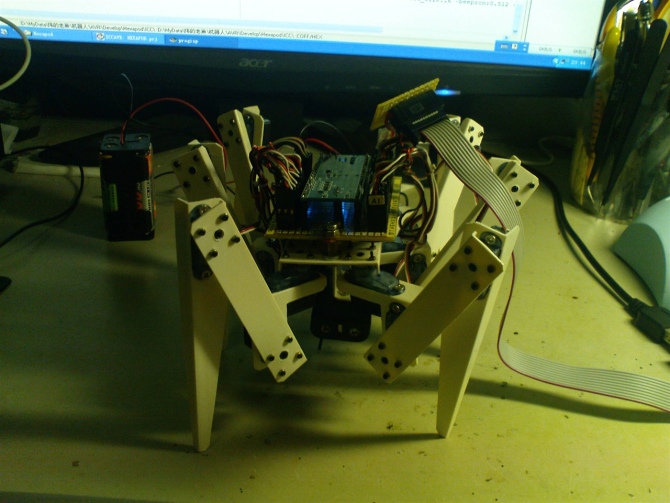
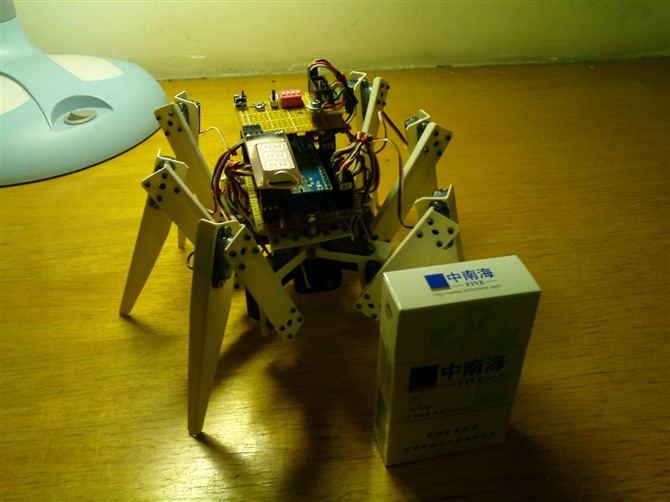
8、全负荷状态
把2节7号的锂电池都装上,在全重状态下,也能简单的站起来。
终于松了一口气,虽然还有一点抖动,但终究是能够独立站起来的。
照片有点模糊,可能是自己有点激动,拍照的时候手抖了。
9、继续完善
18只舵机,耗电还是比较大的,所以再加装了一块电池的电压监控板,可以实时看到锂电的电压变化情况。
关于电压监视板:http://item.taobao.com/item.htm?id=6754662637
与一个香烟盒对比大小。


接下来的工作还是在继续调试程序控制动作,最终考虑加上一些传感器并支持用红外或者蓝牙进行遥控!