电动公交大客车用新型电机驱动控制系统特性分析
作者:佚名 文章来源:
不详 点击数:
155 更新时间:2006-5-18
电动公交大客车用新型电机驱动控制系统特性分析
张承宁,李红林,孙逢春,袁学,张旺
(北京理工大学机械与车辆工程学院,北京 100081)
摘 要:针对一种适合于电动公交大客车上使用的新型直流牵引电机,研制了电动公交大客车的驱动控制系统,从理论上建立了新型电机在控制系统下的感应电动势、电磁转矩和转速的数学模型,并用试验数据验证了该数学模型的正确性。由于这种新型的电机具有大的起动转矩,所以可以提供较大的加速度;建立了新型电机的加速度控制系统,并使用根轨迹法来分析这种新型电机加速度的微分负反馈控制系统;仿真结果表明,这种新型电机的驱动控制系统具有非常好的响应特性和调节特性;装车实验结果表明,该驱动控制系统的抗干扰能力强、调节特性快速、平稳,能很好地满足电动公交大客车的动力特性要求。
关键词:电动公交大客车;增磁电机;根轨迹设计;控制特性
1 概述
电动公交大客车的研制是在国家“863”计划和北京“2008”绿色奥运的倡导和支持下进行的。由于目前还没有一种非常适合于电动公交大客车使用的电机,为此特研制了一种新型的永磁它励加增磁绕组复合励磁的直流电机,也叫增磁电机。在这种电机中,使用了一个增磁绕组,并把它连接到电机的续流回路中,在车辆处于起动、爬坡等低速运行状态下,由于驱动电机的转速低,电机电枢回路中的反电动势小,因此在控制器限制驱动电机最大电流的条件下,用于给动力电池组电源电压斩波器提供电机电枢电压的功率半导体器件的导通比小,这样电机电枢中的电流在大部分时间内通过续流回路,使增磁绕组中产生足够大的励磁电流来增大励磁磁场,这样驱动电机就能产生足够大的输出转矩来满足车辆起动和爬坡的需要;而当车辆在起动过程中,随着车速的提高,电机电枢的反电动势也增大,功率半导体开关的导通比逐渐增大,使得电枢电流通过续流回路的时间逐渐缩短,增磁绕组中的磁场逐渐减弱,满足了车辆由低速到高速过程中的弱磁过程。整个过程是在随着车速的变化而逐渐完成的,所以具有很好的调节特性,系统的可靠性也得到改善。当电机处在高速运行时,功率半导体的导通时间长,续流电流较小,电机的励磁主要由永磁提供,因此电机的运行效率很高。在车辆制动时,由于增磁绕组通过一个反并联的二极管使得增磁绕组中没有电流流过,所以不会产生增磁,电机产生的反电势电压就比较稳定,该电压在功率半导体器件的PWM调节下使电压产生泵升,从而给电池充电,完成再生制动。
2 增磁电机驱动控制系统组成
电动公交大客车驱动电机控制系统简化原理图如图1所示。图中电池组B是384V,为驱动系统提供动力。直流电机M为公交车的驱动电机,它是带有永磁加增磁绕组复合励磁方式的新型牵引电机。本电机包括电枢绕组A、增磁励磁绕组L1、永磁励磁绕组L2[1]。U1为以IGBT1为主体的功率智能模块,D1、C2、R1组成其浪涌电压吸收保护电路,D2为装在模块内的反向保护二极管,IGBT1工作在高频脉冲调宽状态,其斩波电压控制驱动电机转速n。U2为以IGBT2为主体的功率智能控制模块,D3、C3、R2组成其浪涌电压吸收保护电路,D4为装在智能模块内的反向保护二极管,调节IGBT2的导通脉冲宽度,可以改变再生电流,以控制驱动电机(车辆)制动。U0为电流传感器,用于功率模块过流保护;电流传感器U3用于测量驱动电机电枢电流ia。D6为再生制动通路二极管模块,R3、C4、D5组成其浪涌电压吸收保护电路。ACCE为来自加速度踏板的电机加速信号,BRAKE是来自制动踏板的制动信号,CONTROL是以单片机为核心的控制单元。工作时,接通电源开关,控制单元检测来自加速踏板的加速度信号ACCE和来自电流传感器U3的电枢电流ia,如果ia小于ACCE给定值,则增加IGBT1的高频脉冲宽度,使加在电枢两端的电压ua上升和ia增加,电机M加速;反之,如果ia大于ACCE的给定值,则减小IGBT1的脉冲宽度,使ua下降和ia减小,电机M减速。在这一过程中,IGBT2始终关断。当电机(车辆)制动时,加速度信号ACCE为零,并且IGBT1关断,控制单元接受BRAKE制动信号,并向IGBT2发出相应的脉冲调宽信号,IGBT2导通,电机M的反电势通过IGBT2和D6导通或者通过D2及电池B导通构成回路,从而实现车辆的再生制动。

3 增磁电机的固有特性分析
增磁电机的固有特性和普通的并激电机相似,在满足各项技术指标的情况下,它的优越特性主要体现在驱动控制系统的控制下,也就是车辆的动态运行过程中。表1是电机电压在额定电压Ua=300V和增磁绕组不通电时,试验得出驱动电机电枢电流ia、电机转速n、电磁转矩M、效率h之间的对应关系。

增磁电机在只有永磁作用和额定电压下工作时相当于普通的并激直流电机,所以可以按照永磁直流电机满足的方程来计算电机的感应电动势和电磁转矩,根据表1中的数据,电机在永磁作用下的电动势系数为

式中 Ce 为电动势常数,由电机结构而定;φy为电机永磁励磁磁通;ia为电机电枢电流;Ra为电机电枢电阻; n为电机转速。
所以电机在永磁励磁作用下的电机感应电动势就为

所以永磁作用下的电磁转矩可由下式确定

式中 My为电机电磁转矩,CM为转矩常数,由电机结构确定。

4 增磁电机在控制系统驱动下的工作特性分析
4.1 概述
增磁电机的优越性能主要表现在电机启动时具有较大的转矩,有利于车辆的起步和爬坡。下面分析增磁电机在控制系统下的工作特性,建立增磁电机在控制系统下的数学模型。假设:① 由于图1中IGBT1工作在高频开关状态下,可以假设电枢电流中没有纹波;② 电机控制电路对电池组的压降很小可以忽略不计;③ 电机工作时温升很小,可以假设永磁磁场恒定;④ 增磁绕组中的励磁电流以矩形波方式脉动,所使用的电流指电流的平均值,计算得到的电枢感应电动势和电磁转矩也为平均值。
4.2 增磁电机在控制系统下的感应电动势和电磁转矩分析
电机增磁绕组中的电流是一个矩形波,所以产生的磁通就不恒定。根据表2中实测得到的数据,电机增磁绕组产生的磁通和永磁绕组产生的磁通的励磁比为

式中 K为增磁电机在额定电流If=268A时的励磁比;Mz为增磁绕组对电机产生的转矩;My为永磁磁场对电机产生的转矩;M为增磁电机产生的总转矩。
由于增磁绕组作用下产生的励磁磁场与增磁绕组中的励磁电流成正比,所以可得出在增磁绕组中电流为If时,增磁绕组在励磁磁场作用下产生的感应电动势EaZ可由下式得出
当增磁绕组中的电流为If时,增磁绕组励磁磁场作用下产生的电磁转矩MZ为

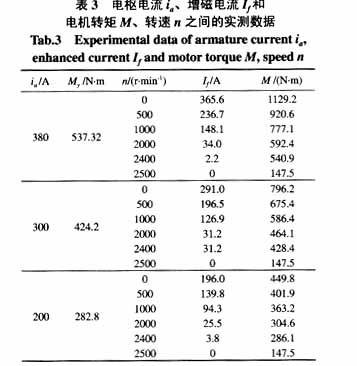
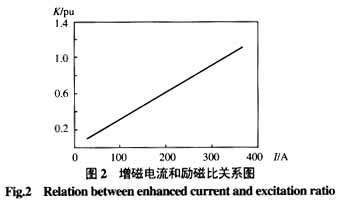
在上面的计算中,使用的增磁绕组和永磁绕组产生的磁通之比为当增磁线圈中的电流为额定电流268A的情况,实际上由于增磁磁通和增磁电流成正比,所以在计算过程中,所选用的励磁比参数可以是相对应的任何值。根据表3中实测得到的数据,励磁比和增磁电流的关系如图2所示。由图2可看出,增磁电流和励磁比成线性关系,其斜率为332.378。所以上面利用增磁线圈电流为If =268A时来分析增磁线圈的感应电动势和电磁转矩是正确的,由此可得

4.3 增磁电机在控制系统下的电磁转矩-转速分析
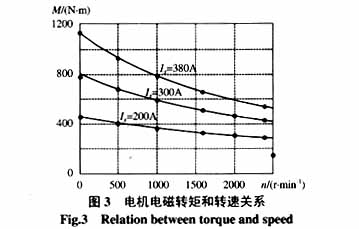
增磁电机的增磁绕组只有在图1中IGBT1的导通比S小于1时才会有增磁电流通过,此时电机才会有增磁的效果。所以在计算增磁电机的电磁转矩-转速时应对IGBT1的导通比进行判断,以确定电机的励磁状态。在图1中,IGBT1的导通时间和加速踏板信号ACCE控制的电枢电流限定值Ix相对应,而加速踏板的信号受到电枢电流的影响,所以IGBT1的导通时间和电枢电流之间形成一个闭环控制系统。由于图1中当IGBT1的导通比等于1时,电枢电压最大值为电池BATT两端的端电压,所以可以通过电枢两端的电压值来判断IGBT1的导通比。如果电枢两端的电压值小于电池组BATT的端电压384V,那么可以判断IGBT1的导通比小于1,此时电机的增磁绕组中有励磁电流,电机以永磁加增磁的方式工作。驱动电机的电枢电流为Ix,增磁绕组励磁电流(平均值)If =(1-S)・ Ix,电机电枢电压和电池组BATT端电压的关系就为Ua =SUB=384S。所以有下式成立
电机电磁转矩由下式确定

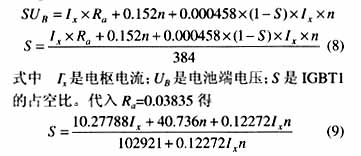
由计算得到的增磁电机电磁转矩-转速曲线图如图3所示(实线),其中“•”代表电机在实测数据下所得的曲线。由图中曲线可以看出,计算值和实际测量得到的数据完全吻合,所以可以用上面的数学模型来分析增磁电机在控制系统下的电磁转矩和转速之间的关系。
4.4 增磁电机在控制系统下的加速度控制特性分析[2-5]
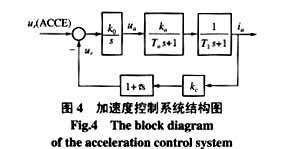
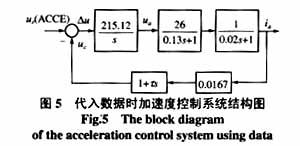
在图1中,控制器以加速度信号ACCE为输入,以来自电机电枢电流传感器U3的信号ia为反馈,根据其差值来调节IGBT1的脉冲宽度,IGBT1的输出为电机电枢电压ua,ua控制电枢电流ia,这样就形成电机加速度的闭环控制系统。其中单片机取作积分控制器,电机电枢绕组Ra La构成电磁惯性,IGBT1保护电路中RC 和电流传感器滤波电路中RC形成惯性;为改善系统动态特性,增加输出(ia)的微分负反馈,取比例系数为τ ,据此可画出加速度控制系统的结构图如图4所示。图中k0为积分控制器比例系数,其值的确定方法是:脉冲调宽的精度为8位,即28=256,当Du=ur-uc=5V时,单片机输出达到满量程,输出脉冲宽度最大,此时IGBT1输出ua=384V;脉冲宽度每增加“1”时,输出电压ua增加(384/255V),单片机采样时间Ts =7ms,1s内积分器的增加值为k0,故k0=384÷225 ÷0.007=251.12 ;由驱动电机参数知La=5mH ,Ra=0.03835Ω,故 Ka=1/Ra=1/0.03835=26;Ta=La/Ra=5×10-3/0.0385=0.13 (s);保护电路及滤波器的时间常数估算值T1=0.02(s);当ia= 300A时,电流传感器输入单片机的电压为5V,故kc=5/300=0.0167(V/A) 。代入上述数据,加速度(电流ia)控制系统的结构图如图4所示。由图5可得其开环传递函数和闭环传递函数分别为
(1)原系统的稳定性分析
闭环系统的特征方程为

由于原系统有一对正实部的共轭复数根,故闭环系统不稳定。
(2)加速度控制系统的根轨迹分析
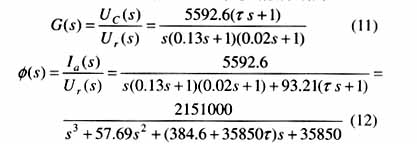
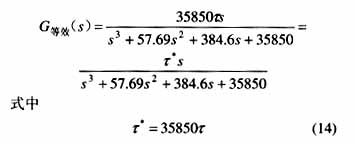
为使系统稳定和改善其动态特性,现选用输出量微分反馈,即τ≠0,由式(12)得

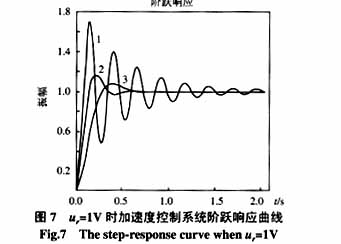
应用MATLAB程序画出以t*为参变量的根轨迹图如图6所示。由图6可知,随t*由0增大,不稳定的闭环极点左移,可使系统变成稳定系统;与此同时一个实数极点沿负实轴右移,当t*足够大时,实数极点更靠近虚轴,成为主导极点,阶跃响应成为单调过程。图中指出的“+”线是当t*=2000"时s1=-17.5901+j35.8276,s2=-17.5901-j35.8276, s3=-22.5079。
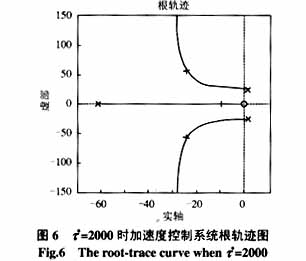

过渡过程为单调上升曲线;为使系统操作平稳,可选择2000<t*<3000范围之内,考虑到式(13) t*和t 的关系,可选0.058<t <0.084范围内。调试结果表明,采用微分负反馈,且参数在上述范围内可得到满意的结果。
5 结论
分析了适合于电动公交大客车使用的新型电机的工作过程,同时对电机在控制系统下的感应电动势、转矩-转速特性进行了分析,从电机的加速度控制系统分析结果看,所设计的电机控制系统具有满意的效果;目前这种电机及控制系统已经装车服务于北京公交121线2年左右,车辆的加速起步性能优于任何同功率的电机,其唯一的不足就是电机控制系统在再生制动大电流的作用下可靠性较差,目前正在进行这方面的研究,相信这种电机在电动公交大客车上会得到大大的应用。
参考文献
[1] Power System Blockset User’s Guide[R].The Mathworks Inc.,Canada,2001.
[2] 张旺,王世鎏.自动控制原理[M].北京:北京理工大学出版社,1994.
[3] 楼天顺,于卫.基于MATLAB的分析和设计―控制系统 [M].西安:西安电子科技大学,1998.
[4] 白玉林.系统与控制[M].北京:科学出版社,2001.
[5] Control System Toolbox for User with MATLAB[R].The Mathworks Inc.,USA,2001.
中国电机工程学报