1mm重复定位精度的agv是怎么实现的
华友高科
2019-02-21 15:59
激光导航agv
Agv在上下料时,需要和工位对接,这时候一般对agv的重复定位精度有较高的要求。传统磁条导航agv依靠检测rfid(或位置标记磁条)的位置进行停车,来达到要求的重复定位精度,该重复定位精度一般在10~20mm范围内。但是有些特殊的场合,要求重复定位精度小于10mm时,这时候传统的方法就达不到要求了。
笔者提出了“一种基于二维码和激光传感器闭环控制的方法”,成功在麦克纳姆轮agv上面实现1mm的重复定位精度。
组成原理
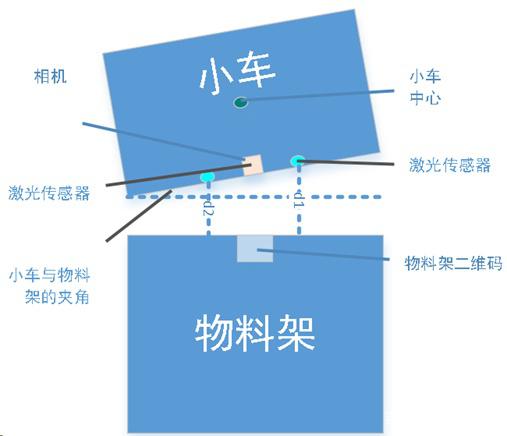
在agv小车的前端固定相机,相机的左右两侧分别固定一个测距激光传感器。需要对接的物料架上面贴上一个50x50mm的二维码。Agv先采用普通激光导航的方式运动到对接位置附近,然后相机检测二维码的位置,同时根据上述两个激光传感器的探测距离,结合3个数据,就可以计算得到agv相对二维码坐标系的x/y/r。以这个反馈坐标位置进行agv车的路径偏差控制,最终停车重复精度可以达到1mm内。
相机参数: 1000万像素,镜头焦距400mm。相机相对二维码的允许左右偏差是200mm.前后偏差也是200mm.
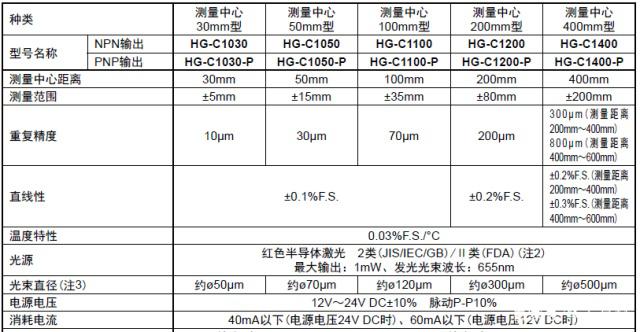
测距激光传感器参数:选择松下HG-C1400型号测距传感器,具体参数入下表。
参数表
|