|
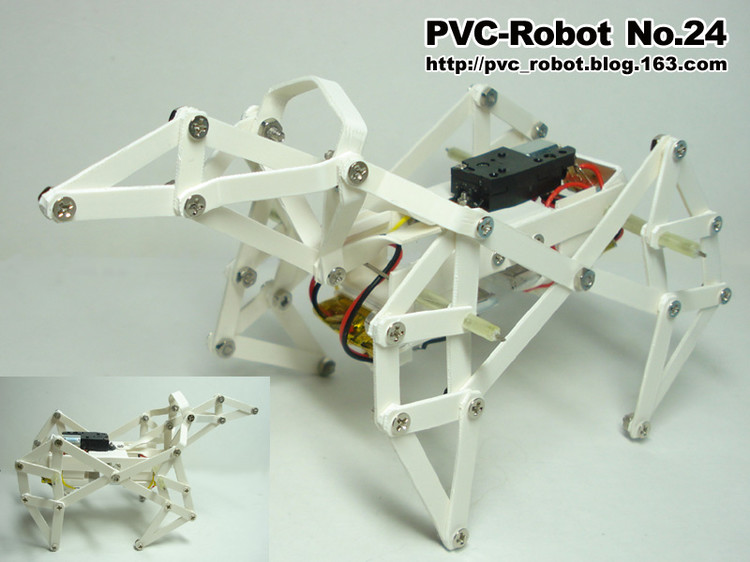
机器人 PVCBOT【24号】漫步者・步履机械马
作者:佚名 转贴自:http://www.hobbypress.cn/bencandy.php?fid-376-id-7469-page-1.htm 点击数:61
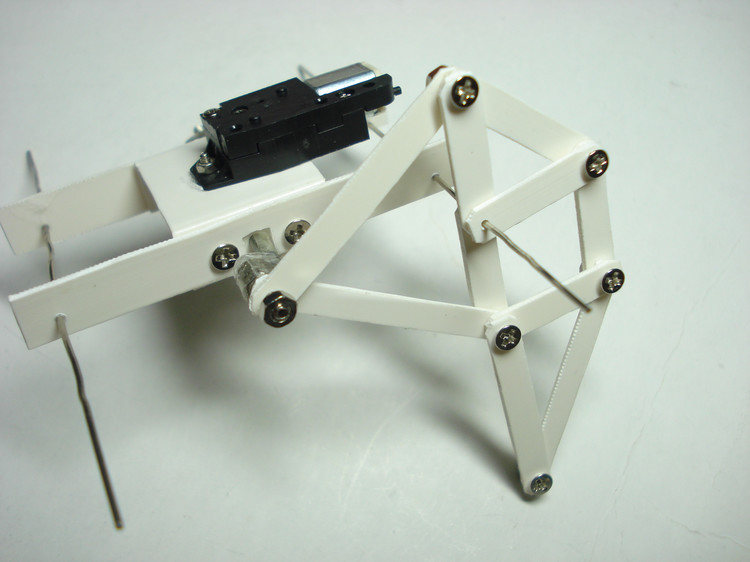
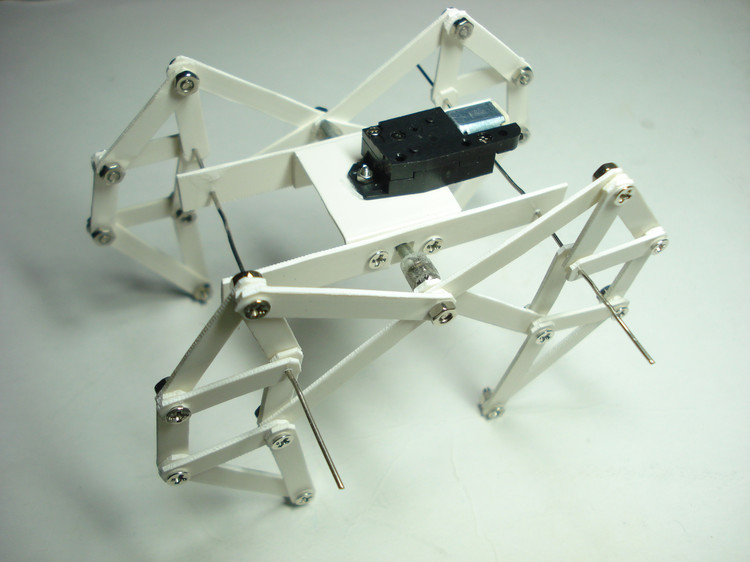
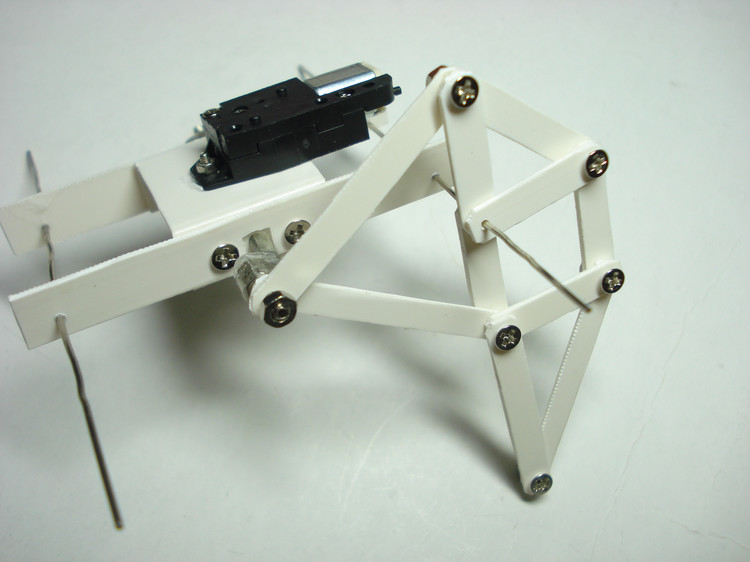
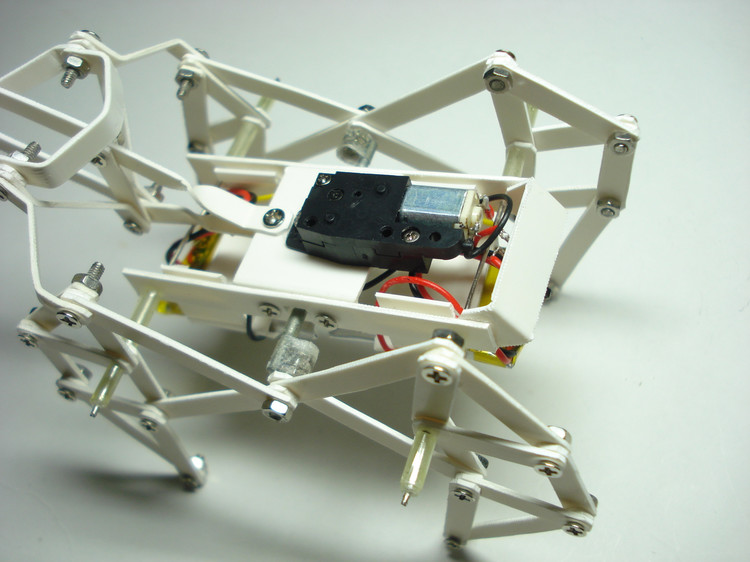
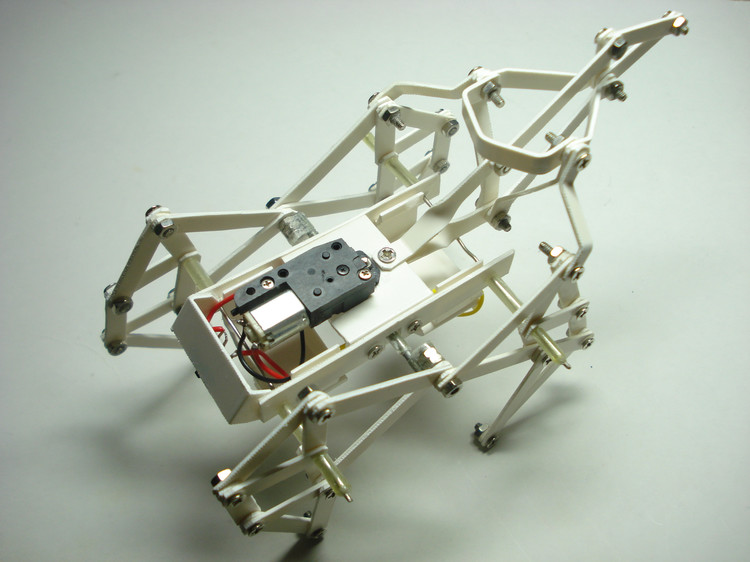
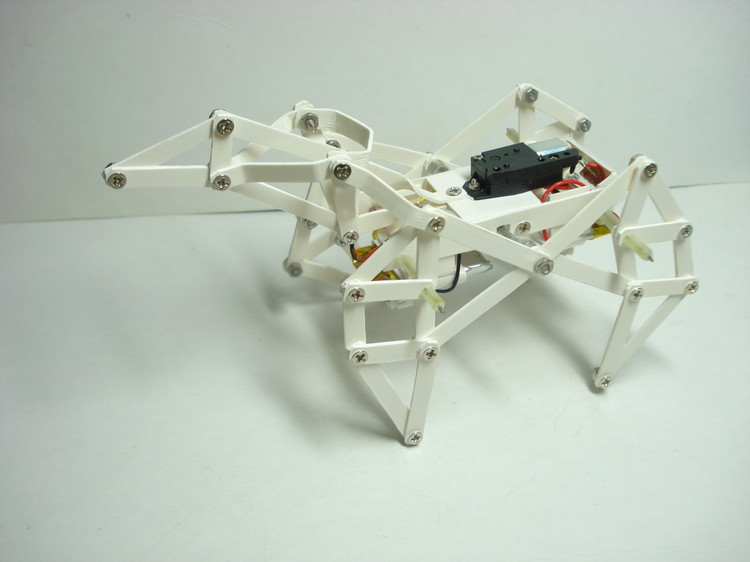
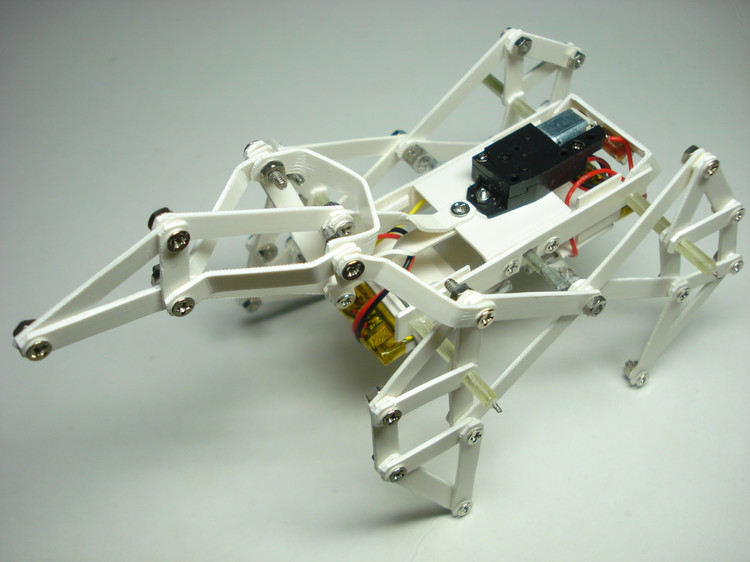
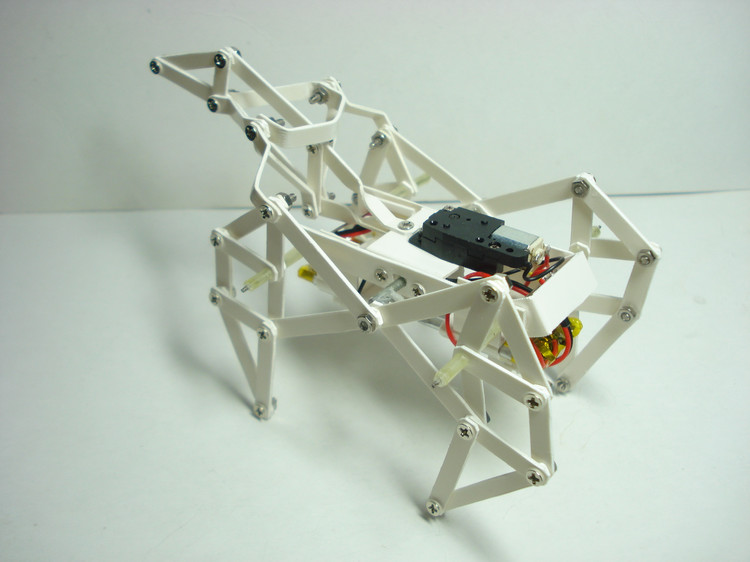
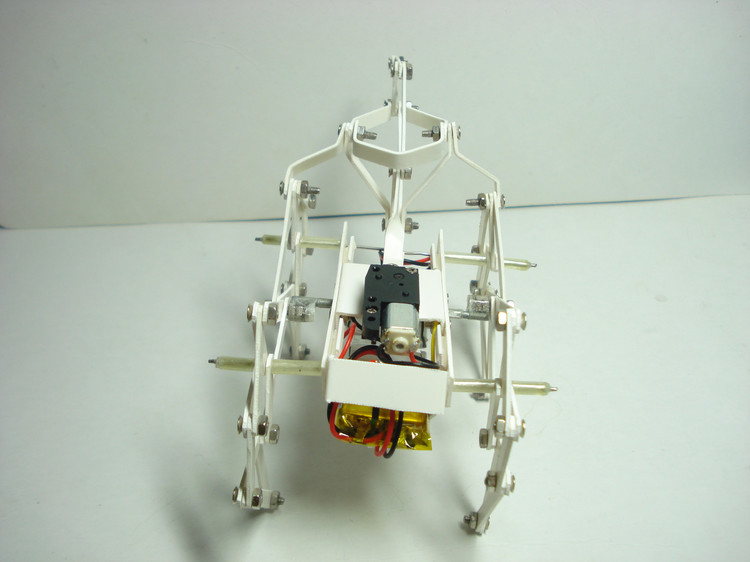
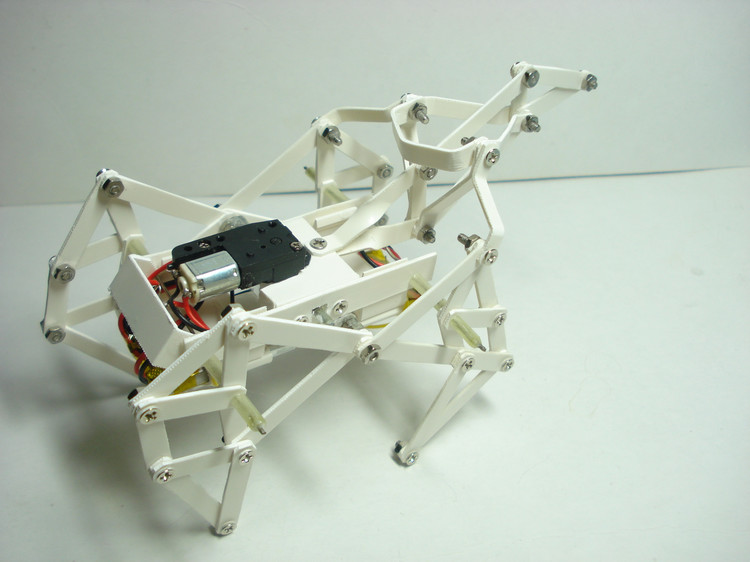
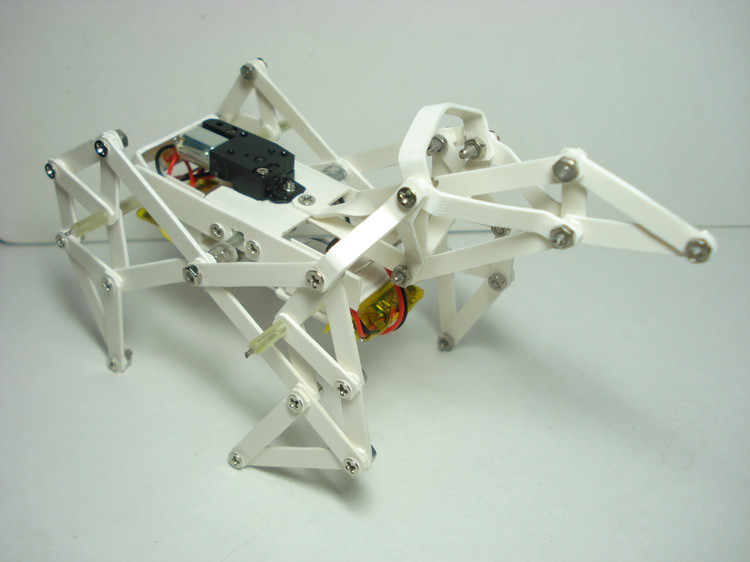
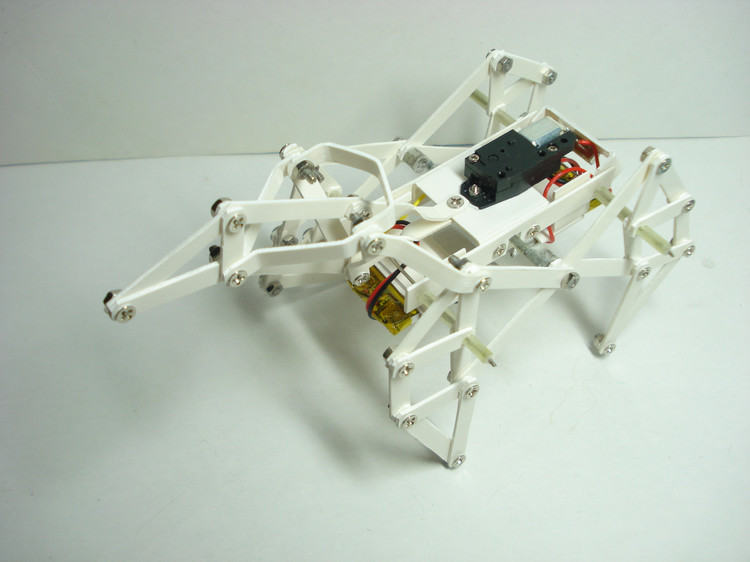
| 本项目还是一个采用Jansen Walker 海滩风动机器怪物类似步履结构的机器人,与前面同样采用这一结构的22号、23号项目机器人相比,当前项目从纯步履的腿部结构为主扩展了到了包括脖子和头部在内的整个躯体结构,整体外形上有点像一匹马,不过这是一匹慢悠悠散步的马,所以又叫它“漫步者”,呵呵。
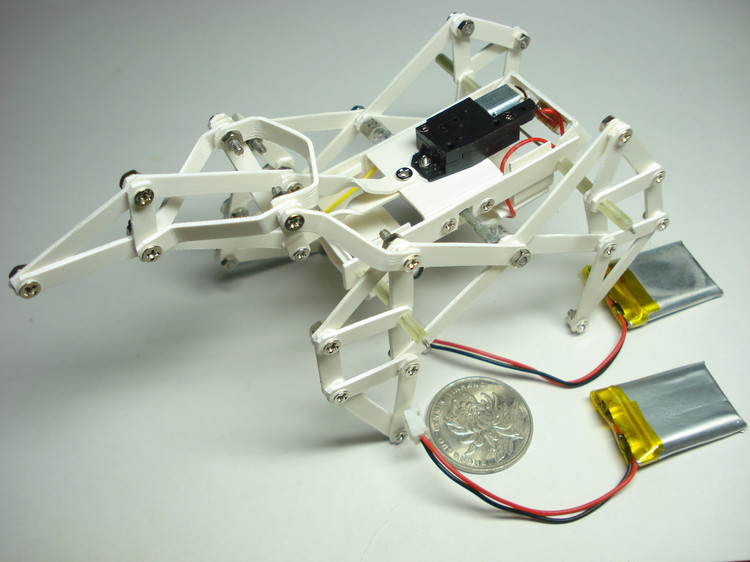
以下为视频,原计划设计是机械马在漫步的过程中,脑袋也跟着摇晃的,但是由于为了确保行走过程中身体左右扭动不是过大而影响平衡,所以曲柄的半径也做得小了点,直接导致行走的步子不大速度也慢了点,而且脑袋摇晃幅度也很小,以致有点看不出来是专门设计成摇头晃脑的,呵呵。 为了提高行走的速度,特意把微能锂电池由一片提高为两片让减速电机的转速加快,但是由于双轴改造后减速箱的减速比较大以及迈步结构的步子较小的原因,行走速度并没有因此而提升太多,看来它还是无损其“漫步”之名而坚持将“漫步”进行到底啊。而各位朋友们在具体制作时,也可以自己选择究竟是用一片微能锂电池或者是两片微能锂电池。 本项目套件的淘宝地址:
与前面的 1、运动方式 本项目机器人既然是机械马,自然整体的运动方式是与之前的PVCBOT 14号机器狗、PVCBOT 23号跋涉者等四足类机器人是类似的,以下是具体步态的分解,以前进方向为例进行说明: 1、静止时四条腿都是同时着地(本项目机器人省略该状态); 2、前进时,四条腿分为两组交替运动,对角的两腿为一组,即:左前腿和右后腿为一组,右前腿和左后腿为另一组; 3、第1组两条腿(左前、右后)往前迈出,第2组两条腿(右前、左后)静止不动但是关节往前弯曲以适应这个躯体中心前移; 4、第1组两条腿(左前、右后)迈出后静止。 5、第2组两条腿(右前、左后)往前迈出,第1组两条腿(左前、右后)静止不动但是关节往前弯曲以适应这个躯体中心前移; 6、两组不断交替…… 如此循环往复,同一时间都保证有一组两条腿着地以保持身体的平衡,并不断往前进。 这里可能有人会问,仅靠两条腿是否可以保证身体的平衡呢?其实,如果前进时保证一定的速度,虽然同时只有两条腿着地,只能有一个很短暂的平衡,但是由于两组的腿交替速度比较快,总体上也可以让身体保持一个动态的平衡。 特别说明:如果整体前进的速度很慢,其中一组静止着地的两条腿是无法保持整个身体的平衡的,我们必须还要让第三条腿也着地,即要利用三点确定一个平面――三条腿可以保持稳定平衡的原理。
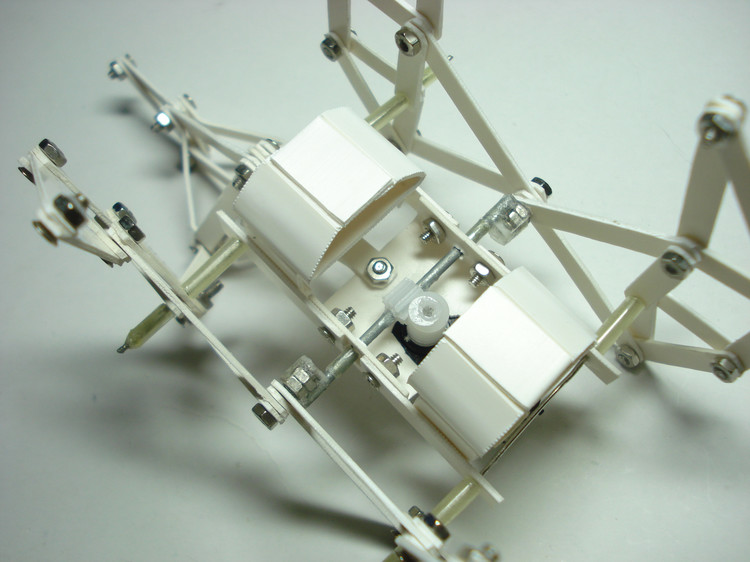
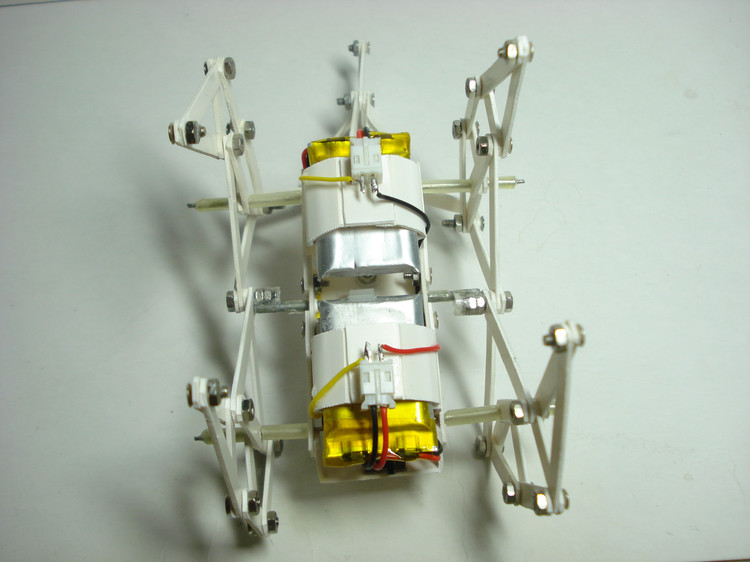
同样作为四足机器人,本项目机器人在动力传动结构上与PVCBOT 14号机器狗、PVCBOT 23号跋涉者是类似的,使用了摆动曲柄滑块机构连杆来把减速电机的转动变为驱动腿部迈步的摆动运动。
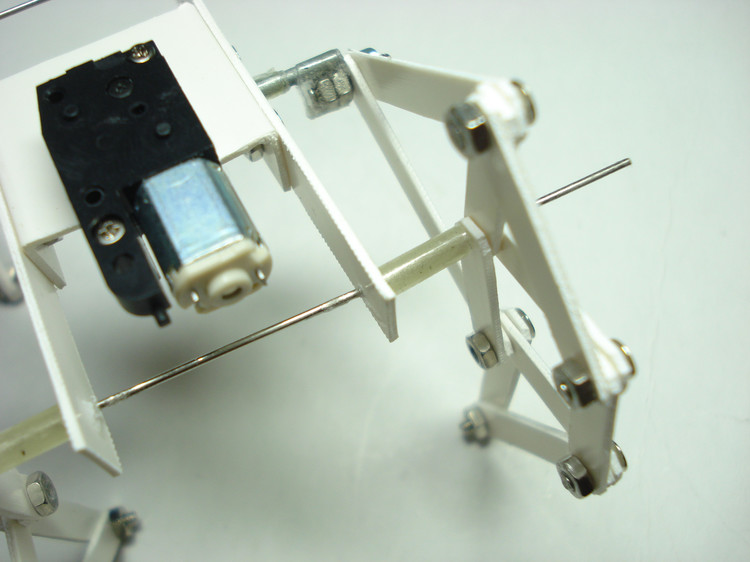
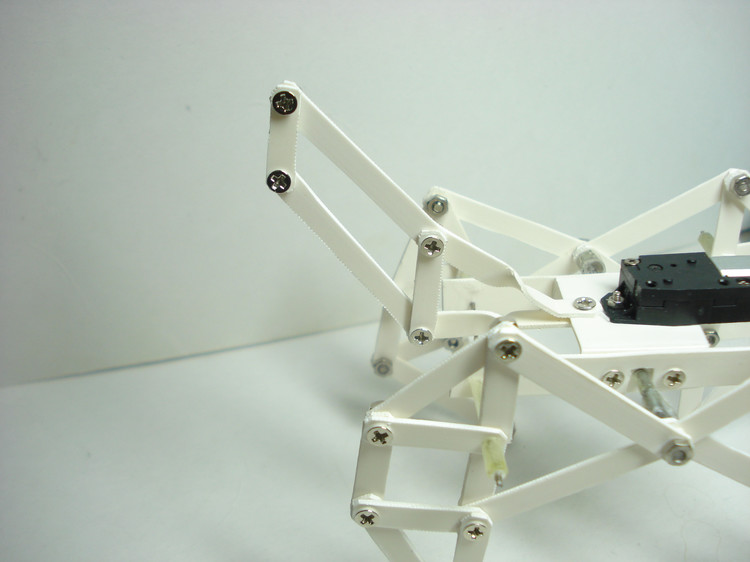
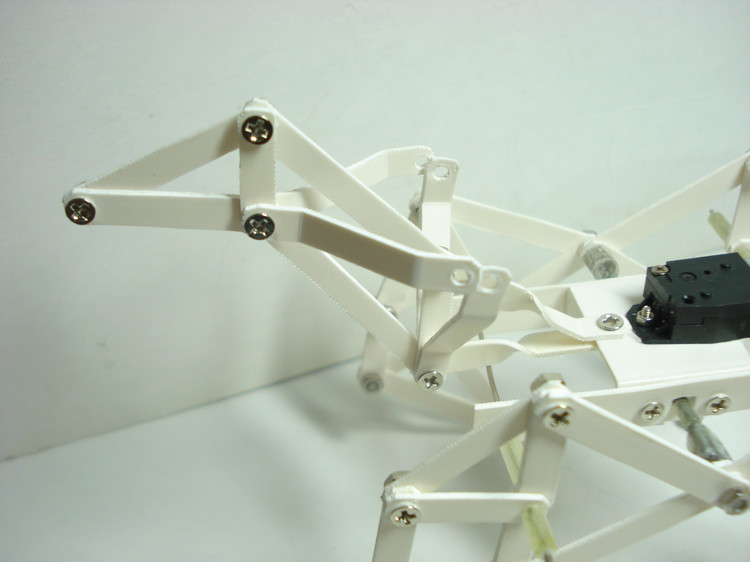
为了能够让两组二足交替向前迈步行走,则“摆动曲柄滑块机构”的安装也比较巧妙,为了直接驱动后面的两足,我们用了左右两套相同的连杆机构,且为同轴的方式安装(同一根转动的轴),但两个连杆的铰链结合部分的位置正好相反,即分别位于转盘一条直径线上的两头,也就是曲柄的位置正好相反,使得左右两套连杆机构在同一时间上运动的状态刚好相反,比如:一个位于最左边的位置的时候另一个正好位于最右边的位置,一个位于最高的位置的时候另一个正好位于最低的位置。 本项目机器人的腿部则是采用了与PVCBOT 22号信步者、PVCBOT 23号跋涉者一样的多连杆复合机构,这是泰奥杨森Theo Jansen所创造出来的经典结构。
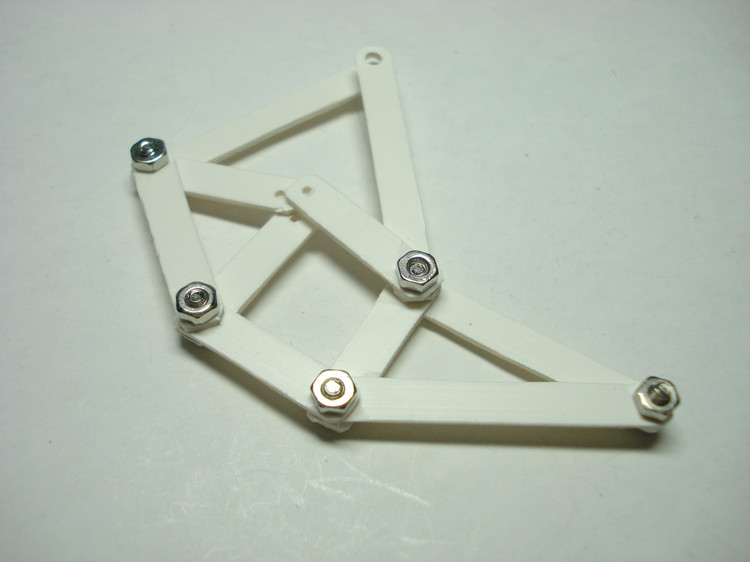
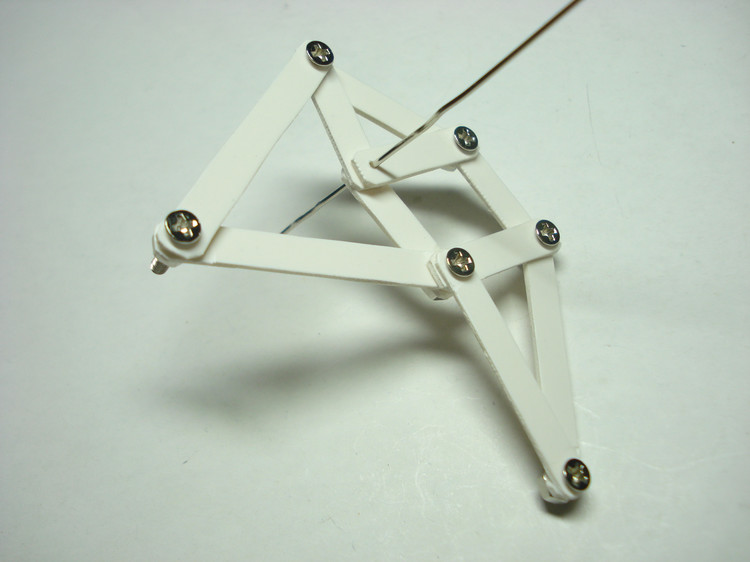
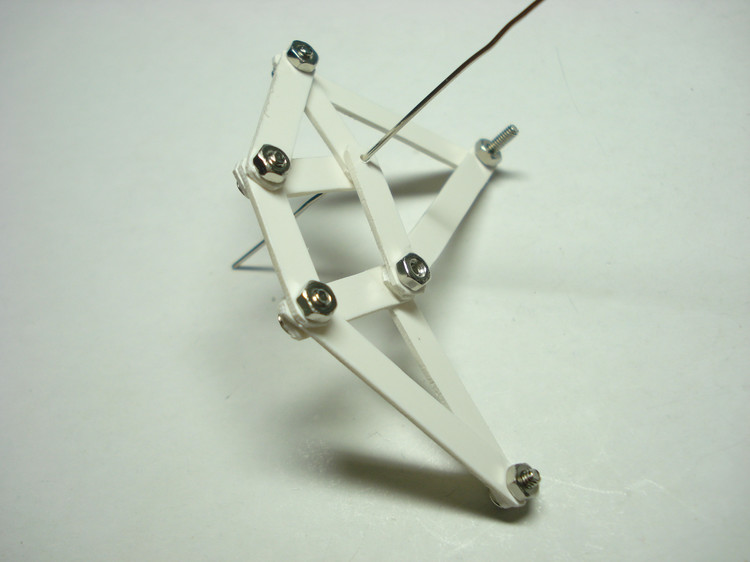
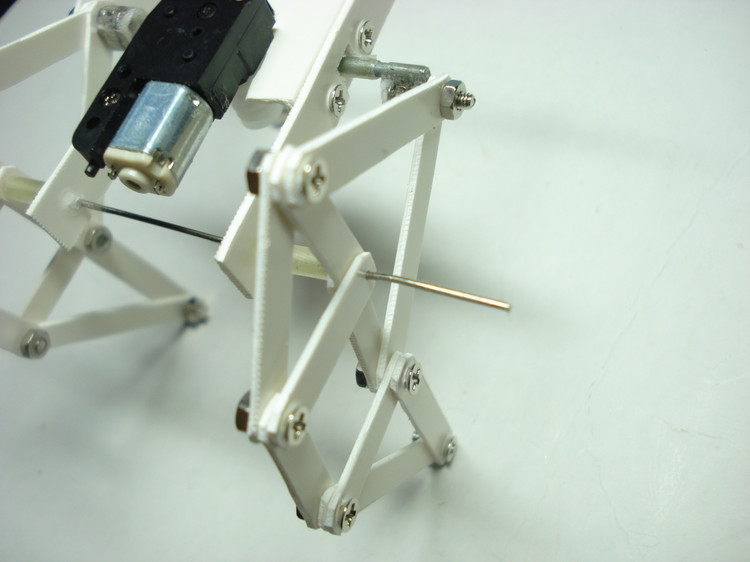
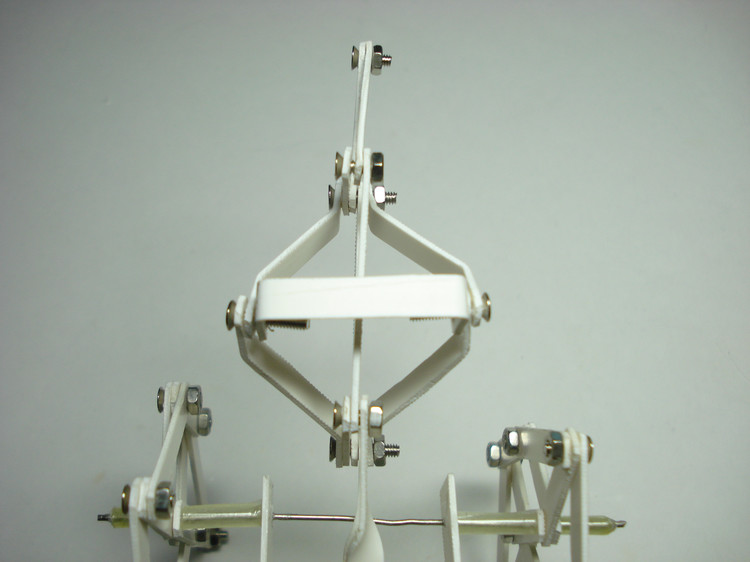
多连杆复合机构主要包括几个部分: (1)四边形结构连杆:四根连杆通过关节铰链连结在一起组成一个四边形,四边形是不稳定的结构,即该结构可以在矩形、平行四边形之间变化,随着腿部关节角度的变化当前四边形连杆的结构也会不断变化形状的; (2)上三角结构连杆:上三角结构的两根连杆以及四边形结构顶上的连杆,三根连杆通过关节铰链连结在一起组成一个三角形,三角形是稳定的结构,则该结构的形状是固定不变的; (3)下三角结构连杆:下三角结构的两根连杆以及四边形结构顶部的连杆,三根连杆通过关节铰链连结在一起组成一个三角形,三角形是稳定的结构,则该结构的形状也是固定不变的; (4)传动连杆:两根传动连杆,加上上三角结构中竖直的一根连杆,以及四边形结构中内侧竖直的一根连杆,总共四根连杆也是通过铰链连结在一起组成一个四边形,四边形是不稳定的结构,即该结构可以在任意四边形中变化。 特别的,传动连杆上的传动铰链是直接接在曲柄上的,也相当于说传动铰链固定在一个圆形的离心轴上,围绕圆心转动的。在曲柄转动的过程中,就会通过传动连杆带动整个多连杆复合机构联动,实现自然顺畅的步履运动。 以下为本项目机器人的整体连杆机械结构图。
本项目机器人的重点在于机械结构,电路则是采用最简单的电路,就是直接电池连接一个电机,中间通过一个拨动开关来控制电路的通断。
以下为电路原理图。
为方便初学者这里还提供实物焊接示意图。
本项目需要的器材主要包括:PVC线槽、电机(带减速齿轮箱)、螺丝/螺帽、垫片等。 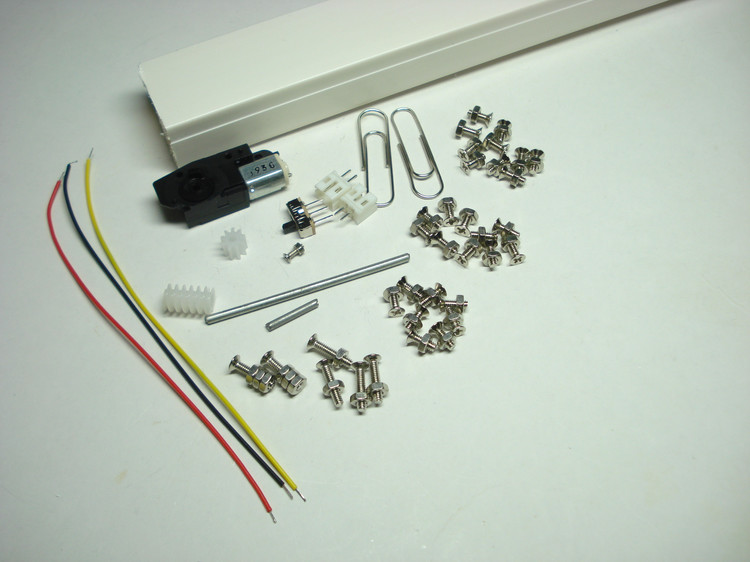
本项目采用宽度为2.5CM的PVC线槽,另外还有微型锂电池。
以下列出本项目的其他主要器件:
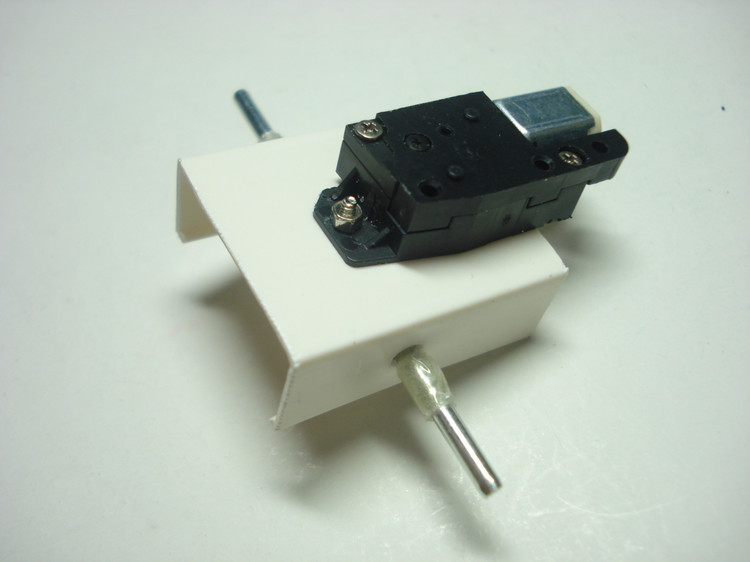
本项目套件的淘宝地址: 三、制作过程 以下将按照制作的顺序,全程介绍本项目机器人的制作过程。 3.1、动力系统 本项目的动力系统也是采用减速电机,采样蜗杆传动机构原理对现有减速电机进行改造的,相关原理里不再重复说明,有兴趣的可以点击这里了解: 下面主要对具体实现过程进行详细说明。 特别注意:对现有减速电机的改造,是需要一定的动手能力的,而且需要足够的耐心和细心,否则将有可能功归于溃。(1)引擎 对减速电机的引擎部分的改造,具体工艺请参见: 完成改造的引擎。 (2)减速箱 对减速电机的减速箱部分的改造,具体工艺参见: 完成改造的减速箱。
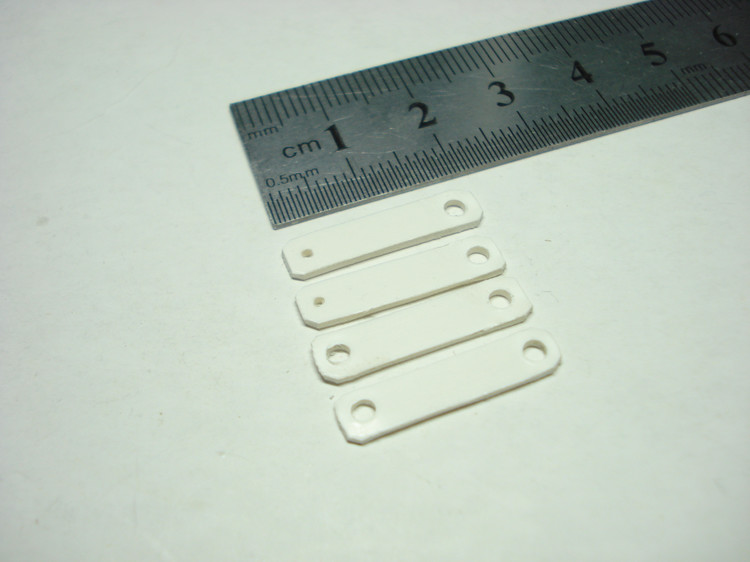
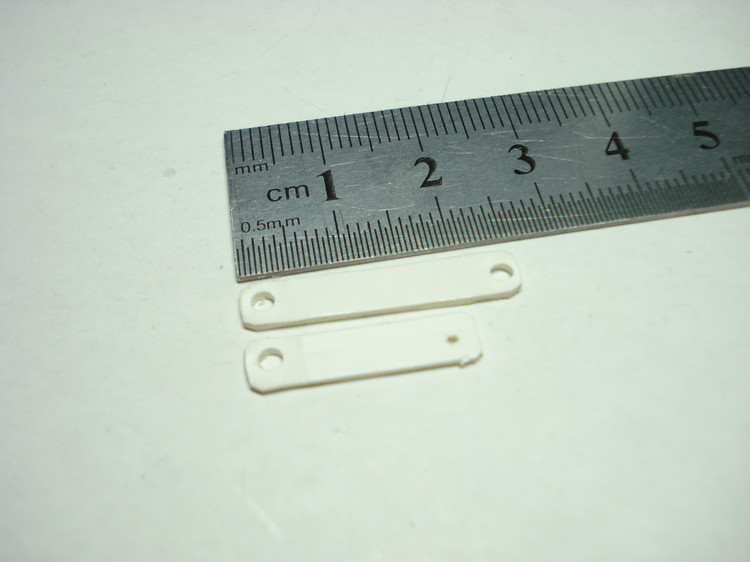
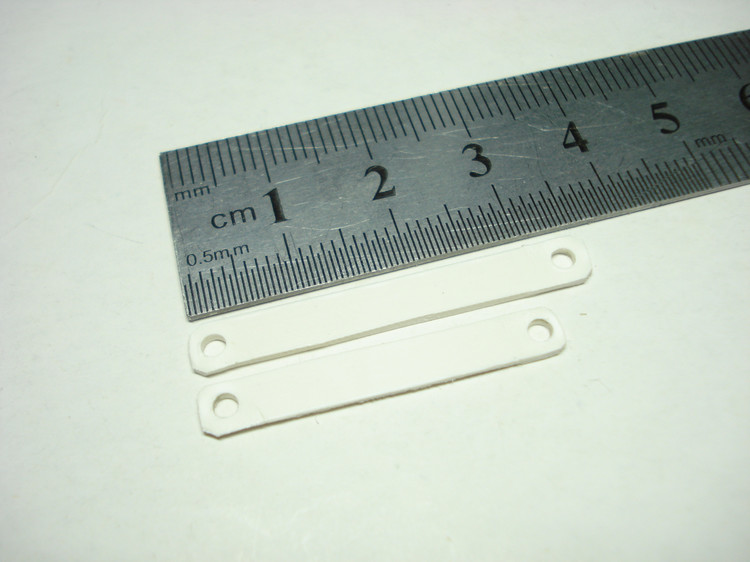
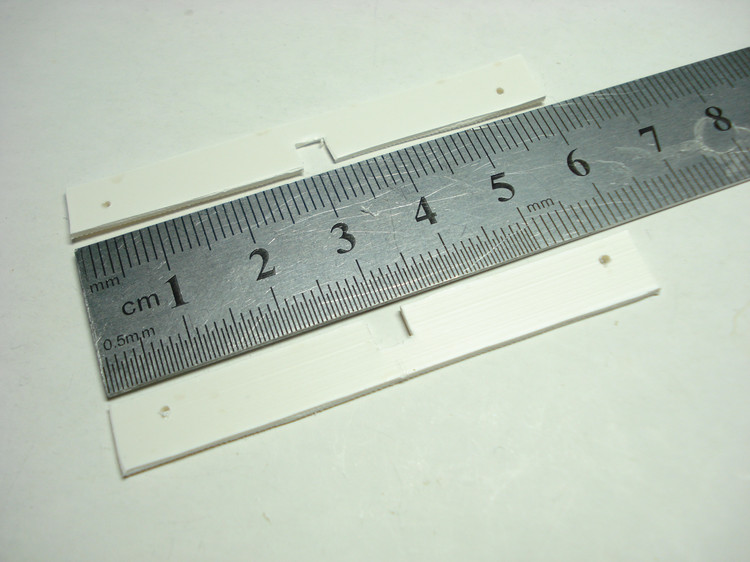
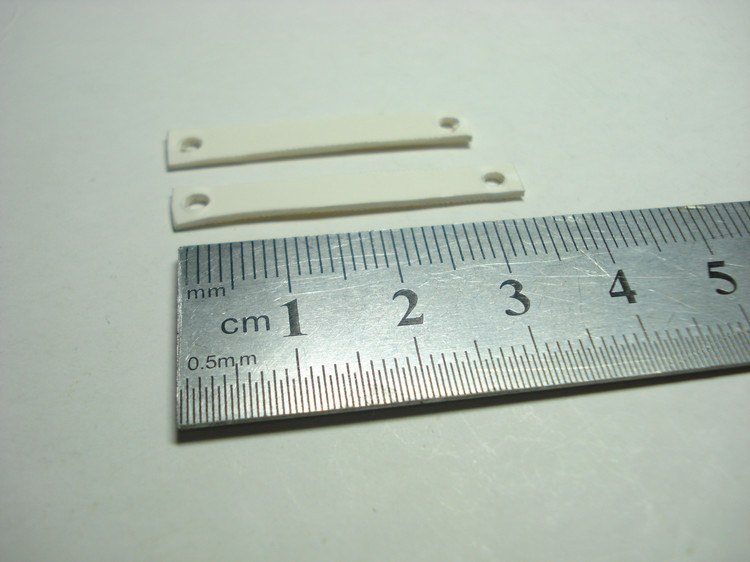
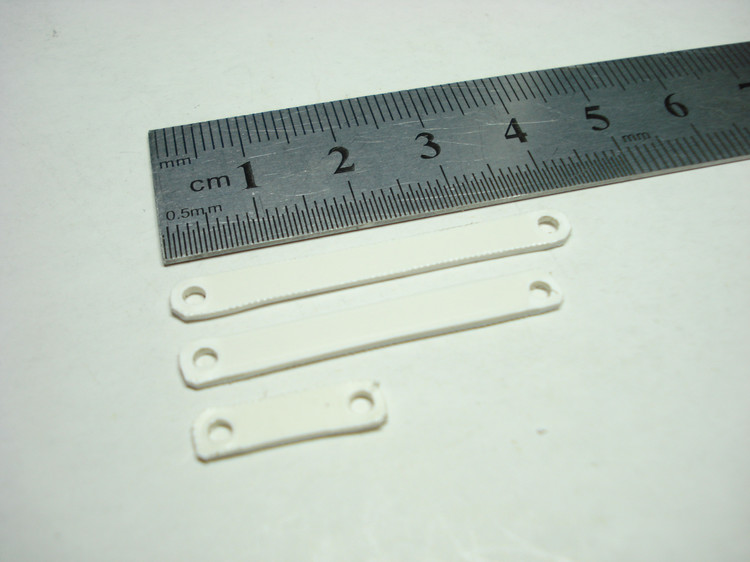
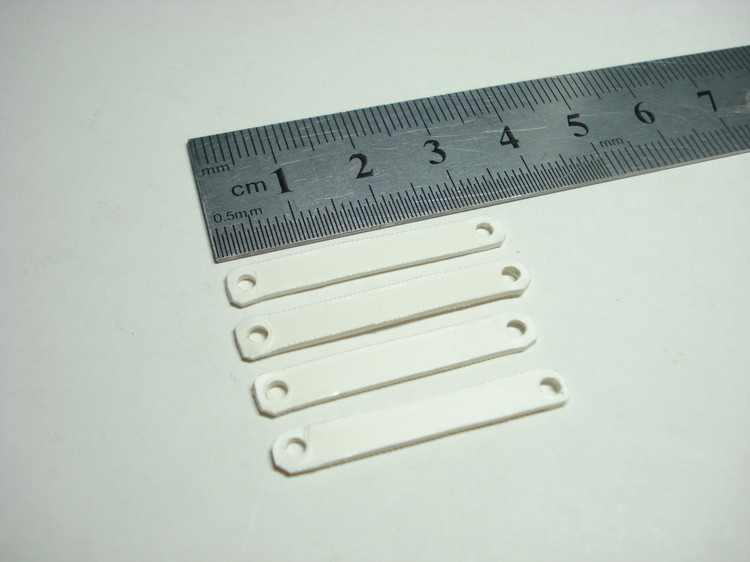
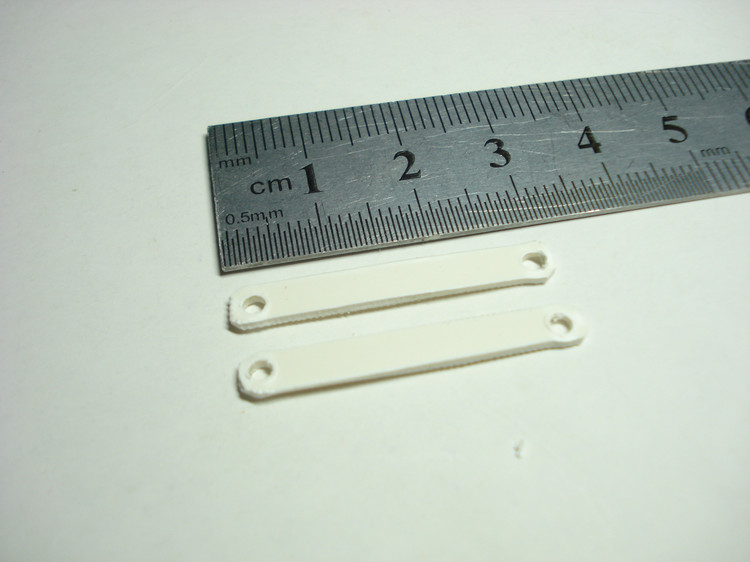
先制作腿部的多连杆复合结构。 a、四边形结构连杆 剪四根长2CM、宽0.5CM的PVC方条作为连杆。 用锥子(或小电钻)给方条的两侧打孔:其中两根连杆的一侧边缘打2mm的小孔,另一侧边缘打1mm的小孔;另外两根连杆的两侧边缘都打2mm的小孔。 所有连杆的四个角都用剪刀剪成圆角。
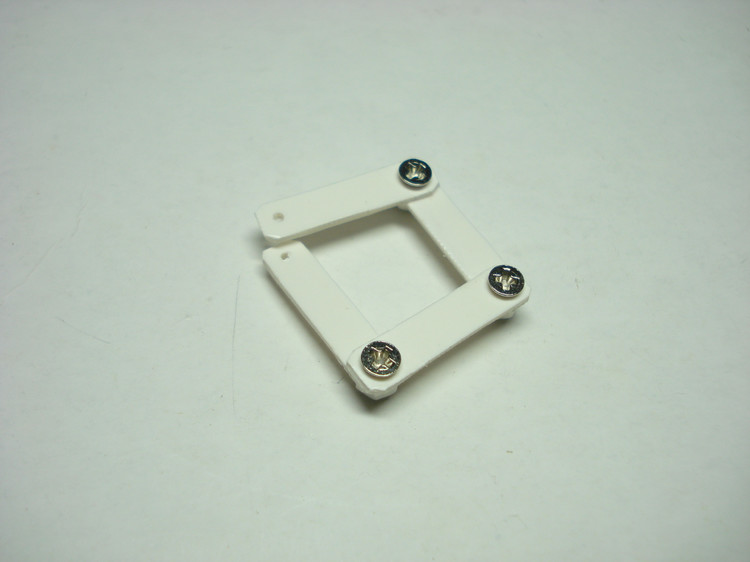
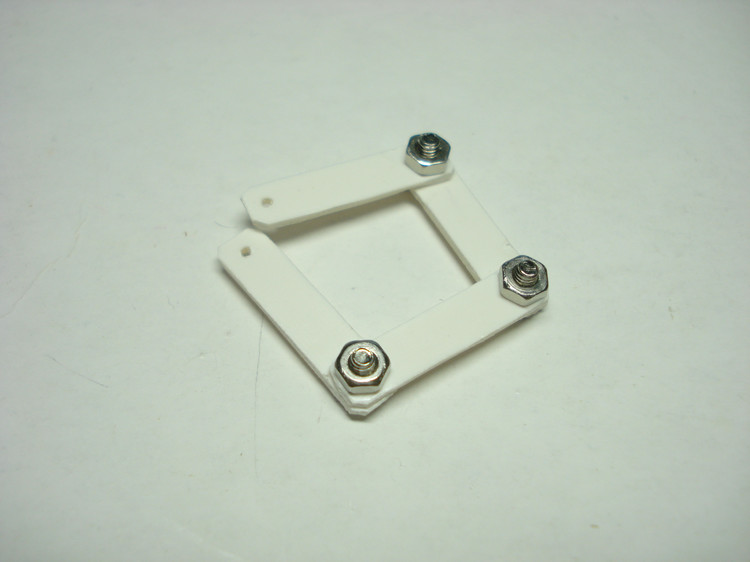
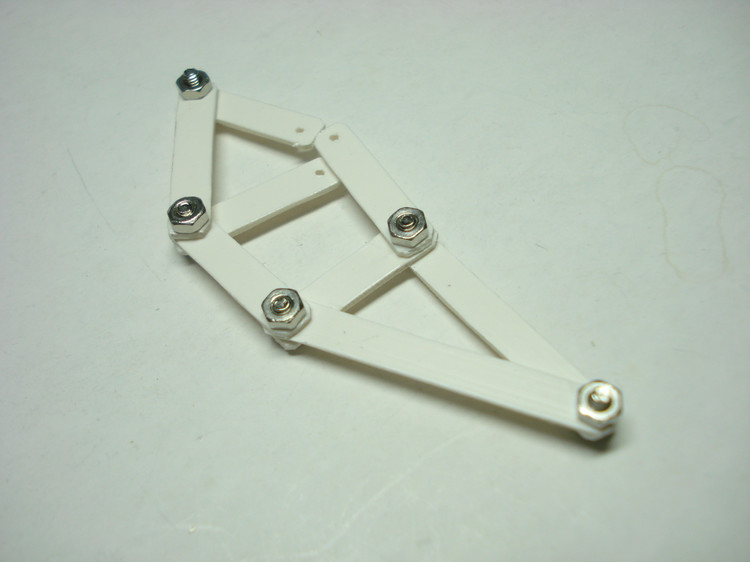
用M2*6的螺丝/螺母把以上四根连杆如下图所示连接起来做成关节铰链,连杆上2mm的小孔都穿过M2*6的螺丝,而两根连杆的1mm小孔对接在一起。 注意:各连杆的上下叠层的顺序尽量如图所示,可保证各连杆层次之间不会错位。 b、上三角结构连杆
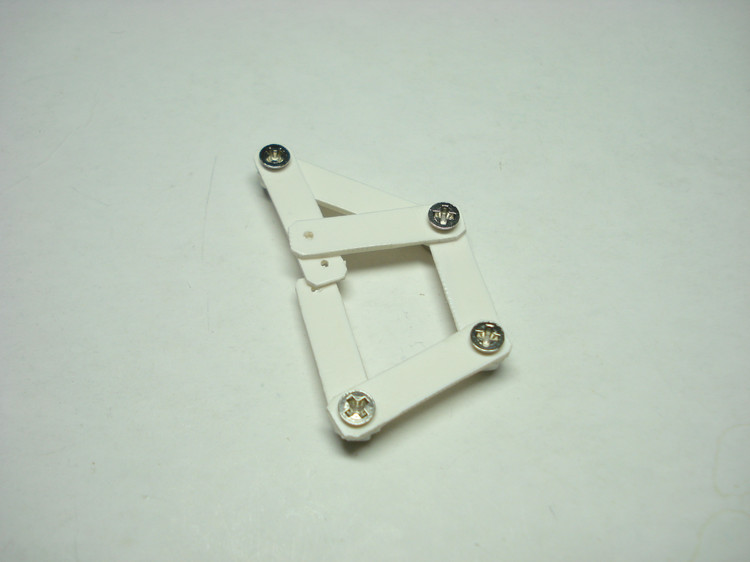
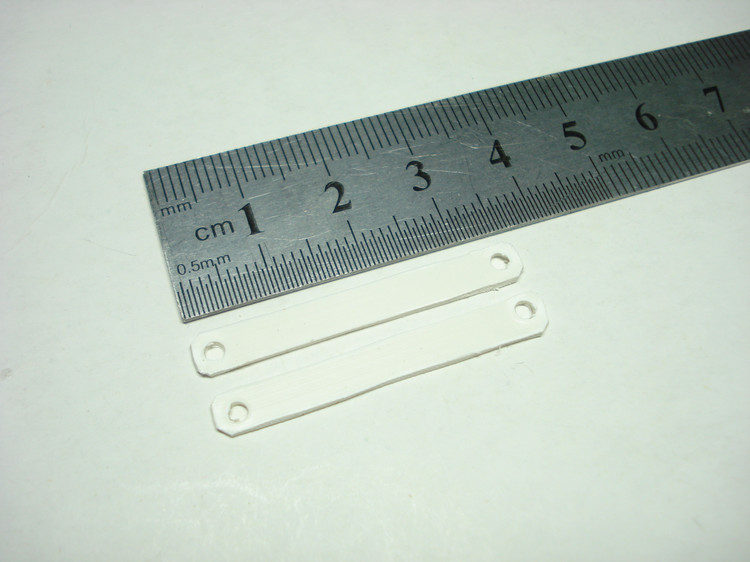
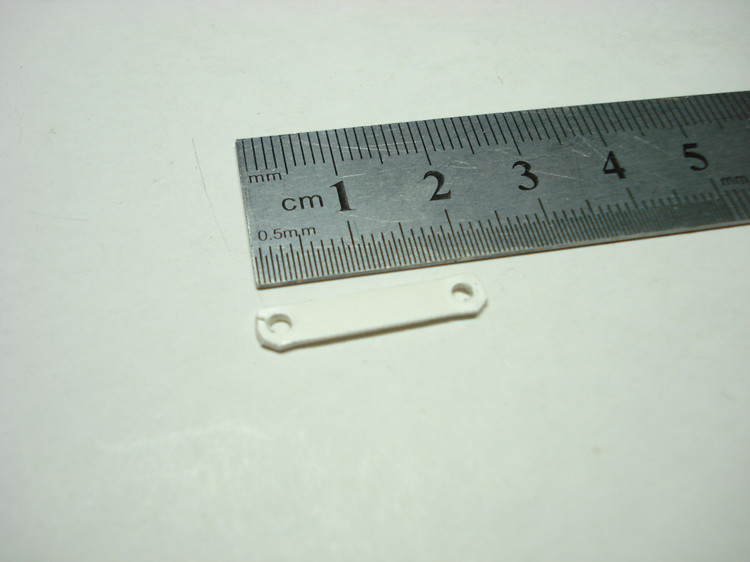
剪一根长2.5CM、宽0.5CM的PVC方条,两侧边缘都打上2mm的小孔;再剪一根长2CM、宽0.5CM的PVC方条,其中一侧边缘打上2mm的小孔,另一侧边缘打上1mm的小孔。 两根方条作为连杆,其四个角都用剪刀剪成圆角,做成上三角结构连杆。 如图所示把两根连杆,借助M2*6的螺丝/螺母做成关节铰链,与之前做好的四边形结构连杆安装在一起。其中所有连杆有1mm小孔的一端对接在一起。 注意:各连杆的上下叠层的顺序尽量如图所示,可保证各连杆层次之间不会错位。 c、下三角结构连杆
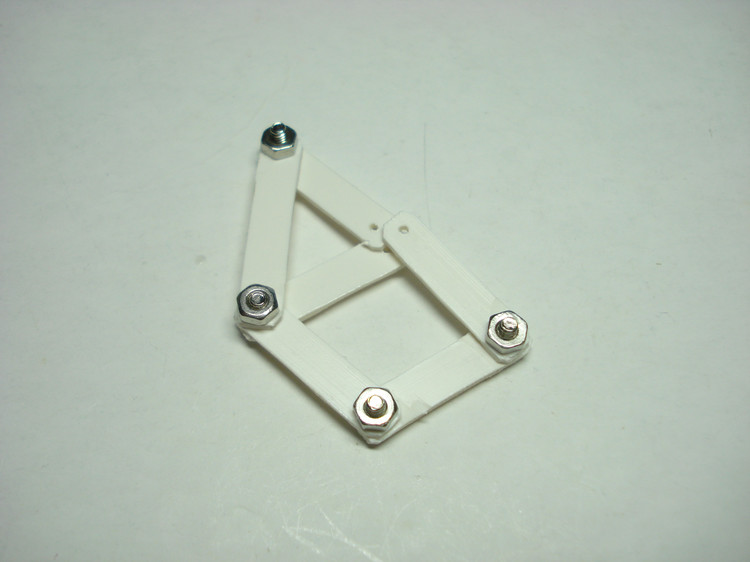
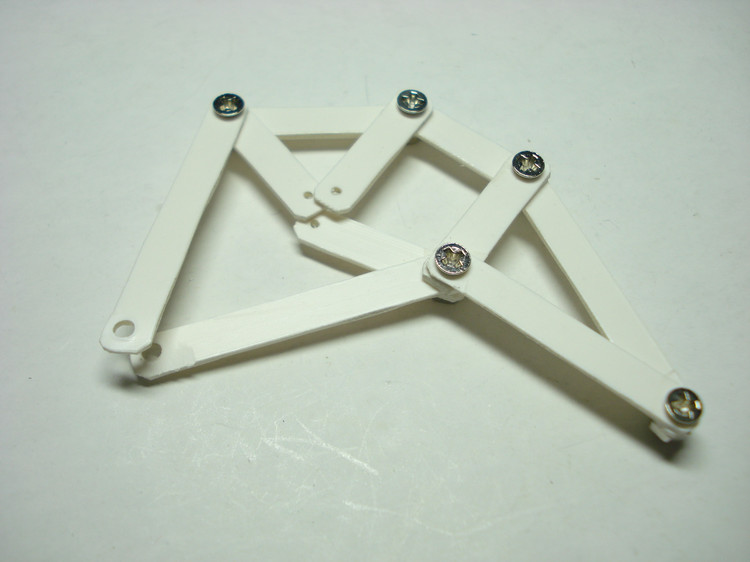
剪一根长3.5CM、宽0.5CM的PVC方条,再剪一根长3CM、宽0.5CM的PVC方条,两根方条两侧边缘都打上2mm的小孔,并且四个角都用剪刀剪成圆角,做成两根下三角结构连杆。 如图所示把两根连杆,借助M2*6的螺丝/螺母做成关节铰链,与之前做好的四边形及上三角结构连杆安装在一起。其中所有连杆有1mm小孔的一端对接在一起。 注意:各连杆的上下叠层的顺序尽量如图所示,可保证各连杆层次之间不会错位。 d、传动连杆
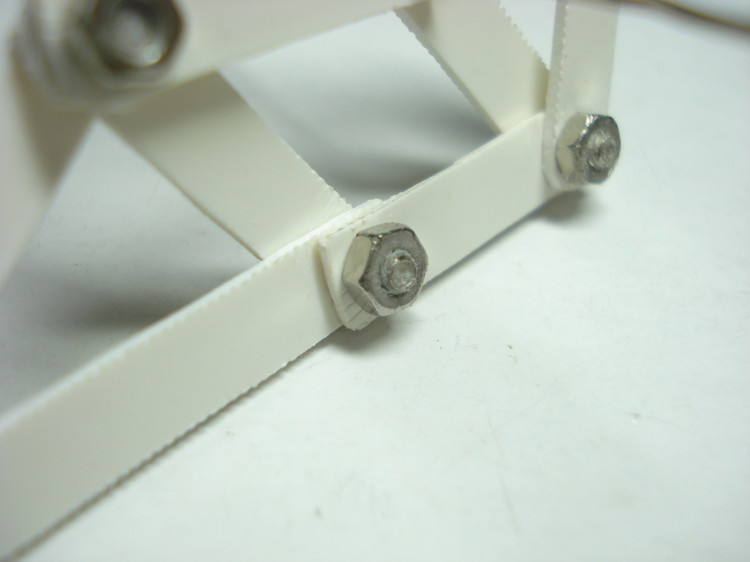
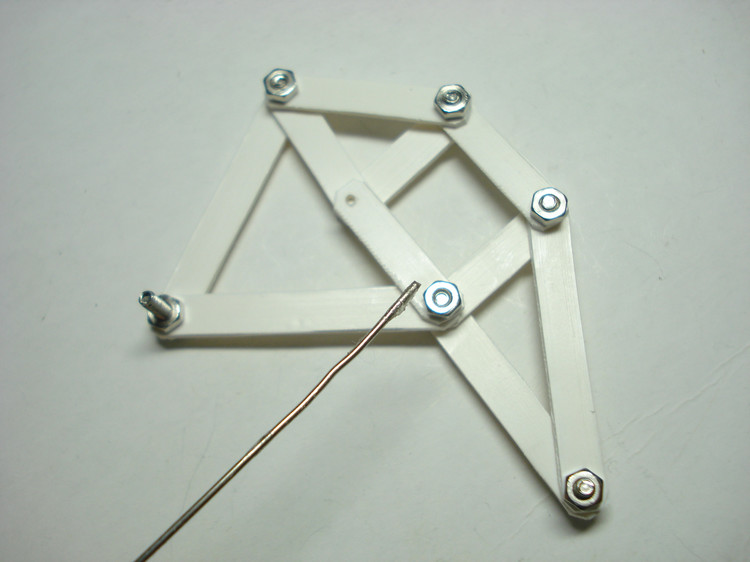
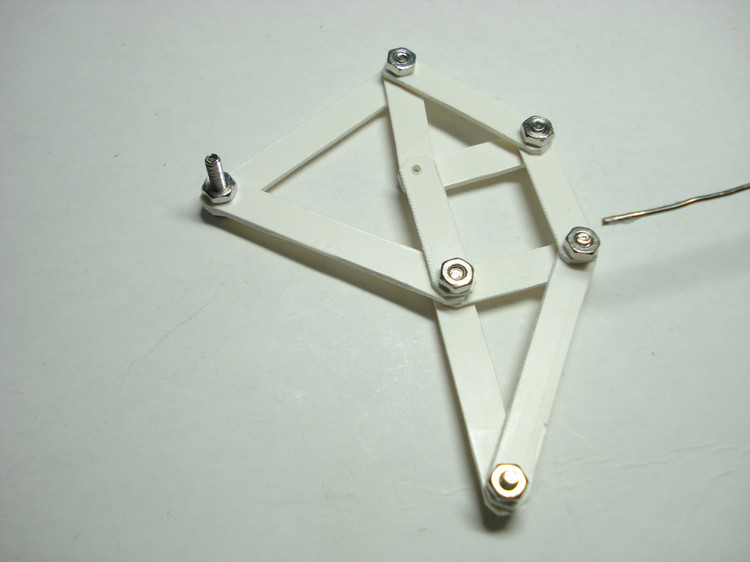
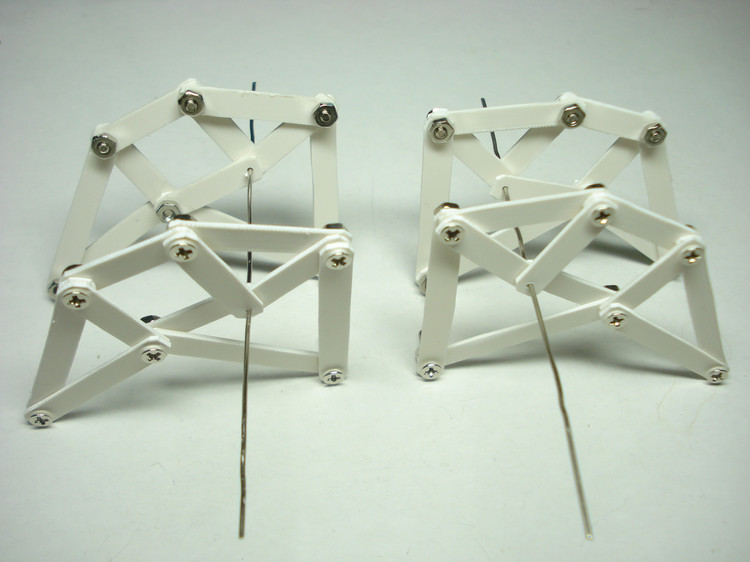
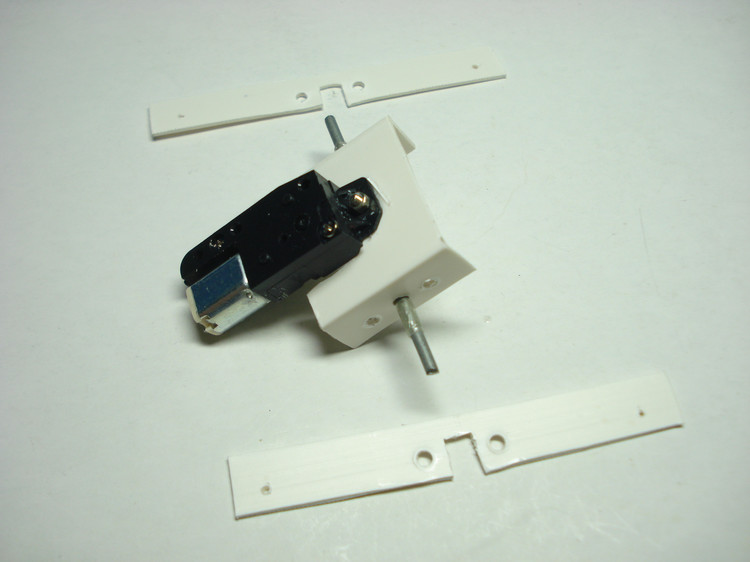
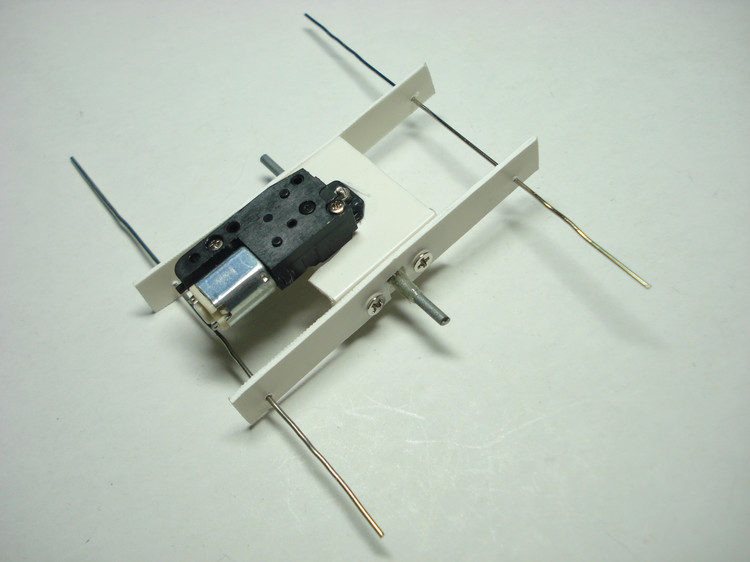
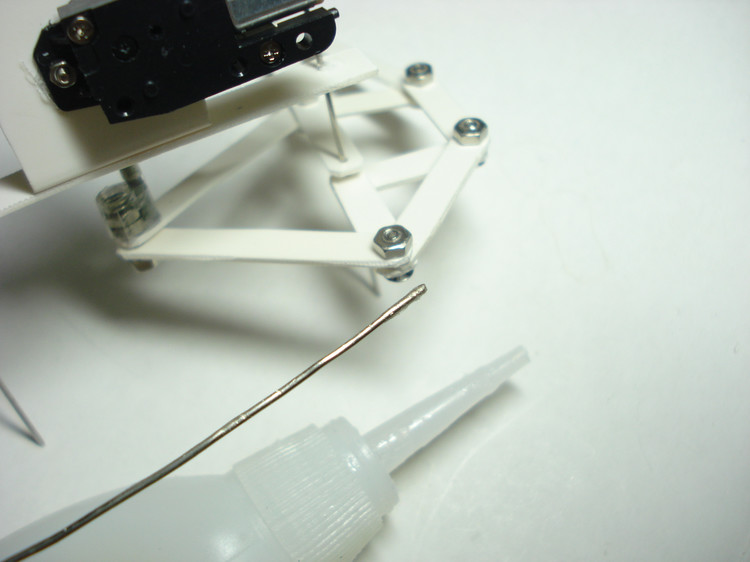
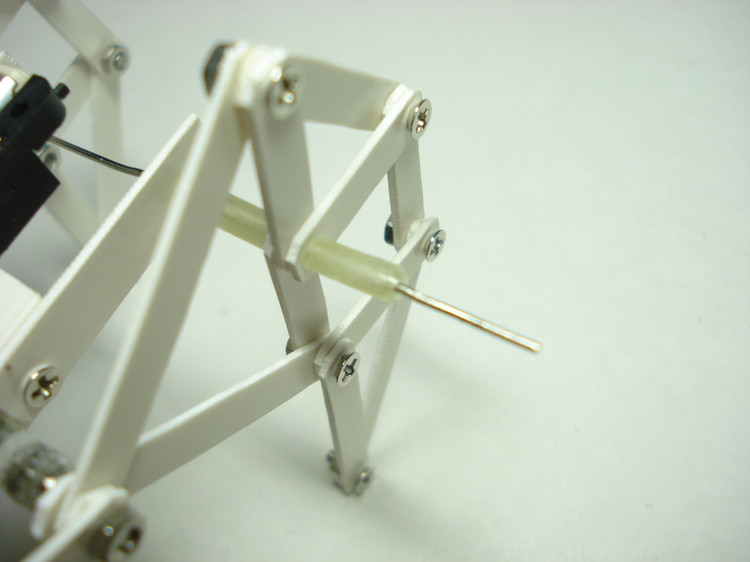
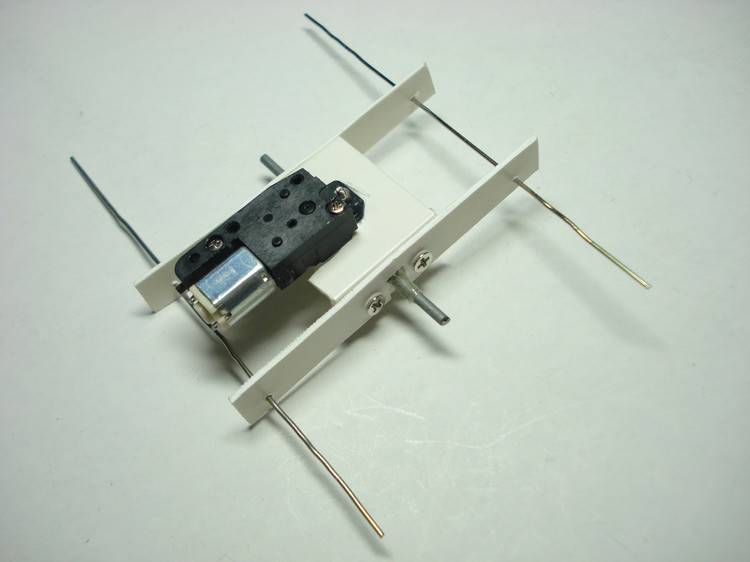
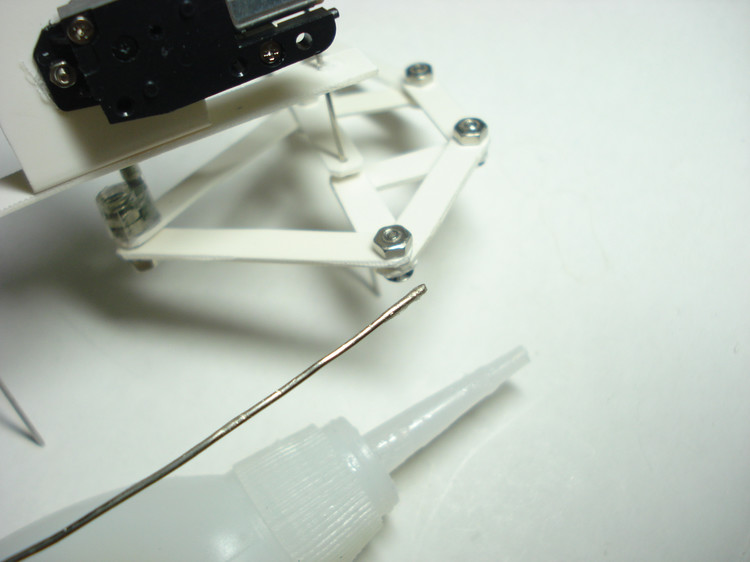
剪两根长3.5CM、宽0.5CM的PVC方条,两根方条两侧边缘各打一个2mm小孔,并且四个角都用剪刀剪成圆角,做成两根传动连杆。 如图所示把两根传动连杆,借助M2*6的螺丝/螺母做成关节铰链,与之前做好的四边形、上下三角结构连杆安装在一起。 注意:各连杆的上下叠层的顺序尽量如图所示,可保证各连杆层次之间不会错位。 用小棍子蘸上少量502胶水,把关节铰链上螺母与螺丝顶端的部分涂上固定起来,其中螺母不要拧紧,也不能太松,能够让铰链顺畅转动。 特别:502胶水一定不能用得过多,否则渗透过螺母把铰链粘死无法转动的。由于502胶水渗透性强,干得快,使用时要格外小心,如果没有控制好用量,轻则会把不该粘住的东西粘起来了,严重的有可能会导致器件的损坏报废,一般建议使用前先试一下会不会出水孔过大一次性会滴出过多胶水,必要的时候可以用牙签之类的工具蘸着胶水涂到要粘贴的部位。 特别注意:当前阶段只有一下如图所示的三个关节铰链螺母需要蘸上502胶水进行固定。 第一个要固定的关节螺母。 第二个要固定的关节螺母。 第三个要固定的关节螺母。 把一根曲别针拉直作为限位杆,如下图所示,把上三角结构与四边形结构的几根1mm小孔对接的连杆串在一起;再把M2*10的螺丝/螺母穿过两根传动连杆的2mm小孔,暂时作为曲柄轴。 这是时候可以测试一下整个结构的灵活性,一只手握住串在四边形与上三角结构之间的限位杆固定不动,另一只手握住串在传动连杆上的曲柄轴(M2*10的螺丝)并摇动做圆周运动,这个时候可以看到整个腿部结构可以随着圆周摇动而实现顺畅自然的步履动作。 以上是其中一条腿的多连杆复合机构的制作过程。 重复之前的步骤,完成共四条腿的结构,两组腿是对称的,分别串在两根限位杆。 以上就准备好所有四条腿的结构。 (2)外壳 剪两片长6CM、宽1CM的PVC方条,并且在中央3CM处各剪一个宽0.5CM、深0.6CM左右的槽,作为外壳侧板。 在两个外壳侧板的两侧,距边缘0.5CM的中间位置再各打一个1mm的小孔。 把两个外壳侧板装到减速箱两侧,其中减速箱的两侧输出轴正好套到外壳侧板的凹槽上。 然后对准两个外壳侧板与减速箱侧边,在凹槽两侧各打一个2mm的小孔。 把外壳侧板与减速箱用M2*6的螺丝/螺母固定起来。
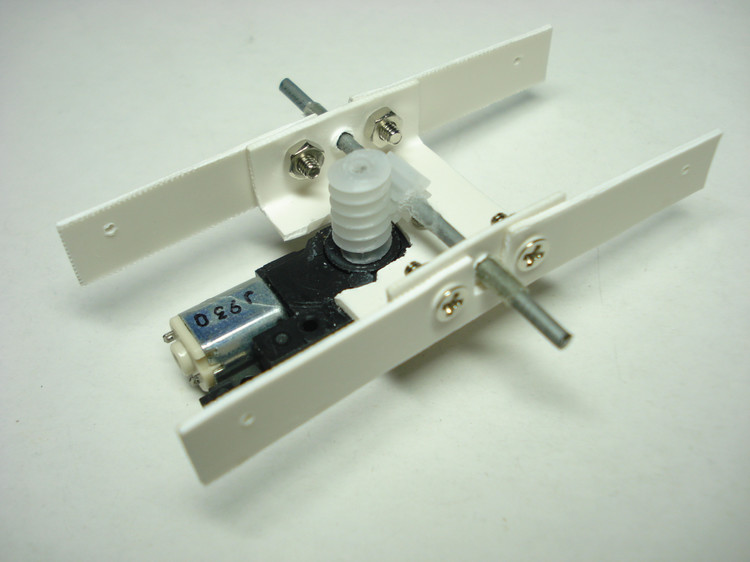
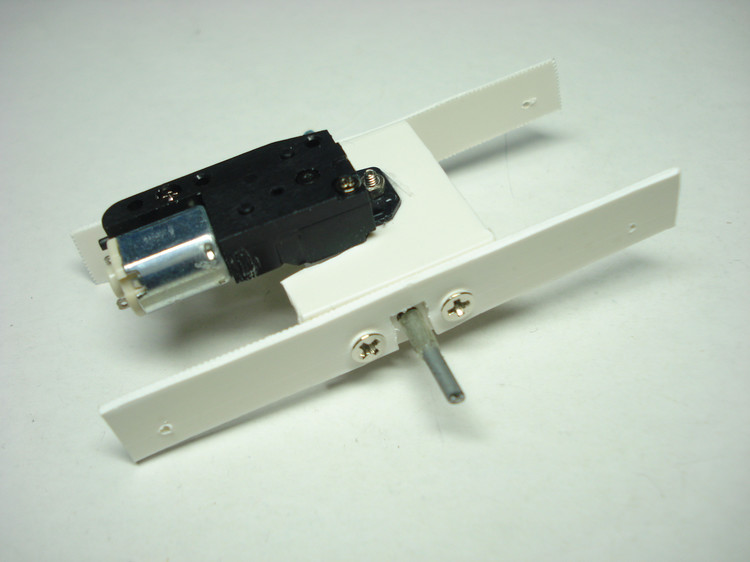
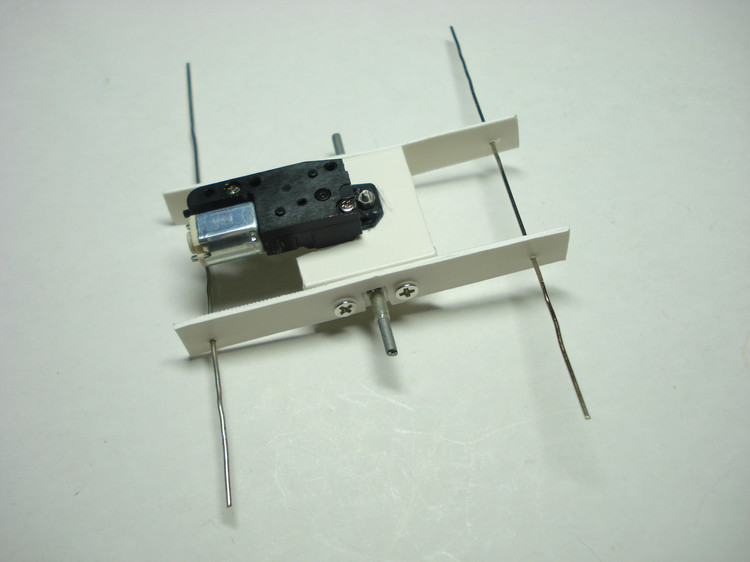
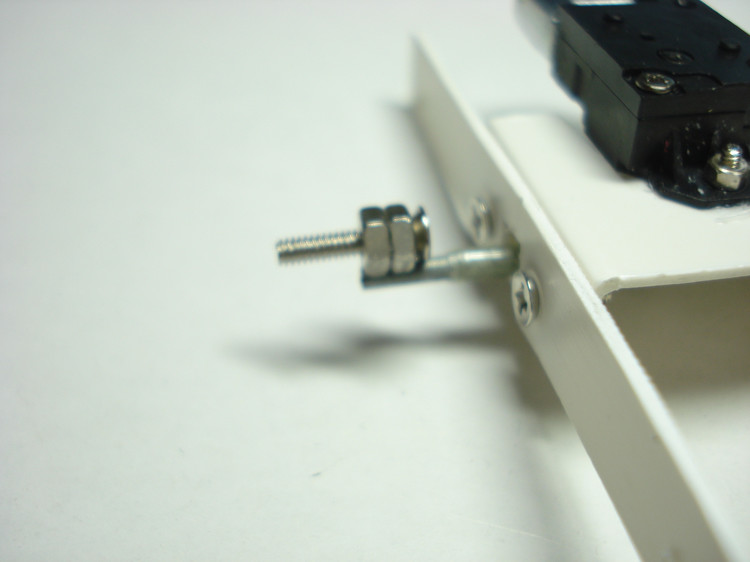
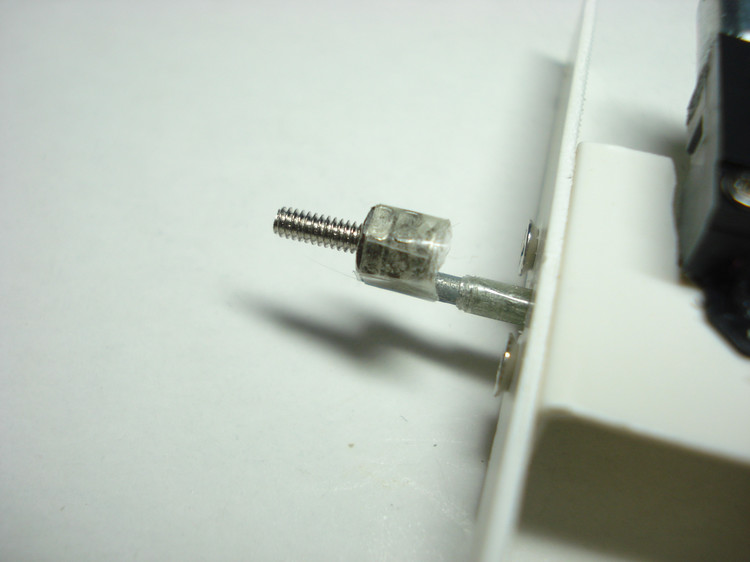
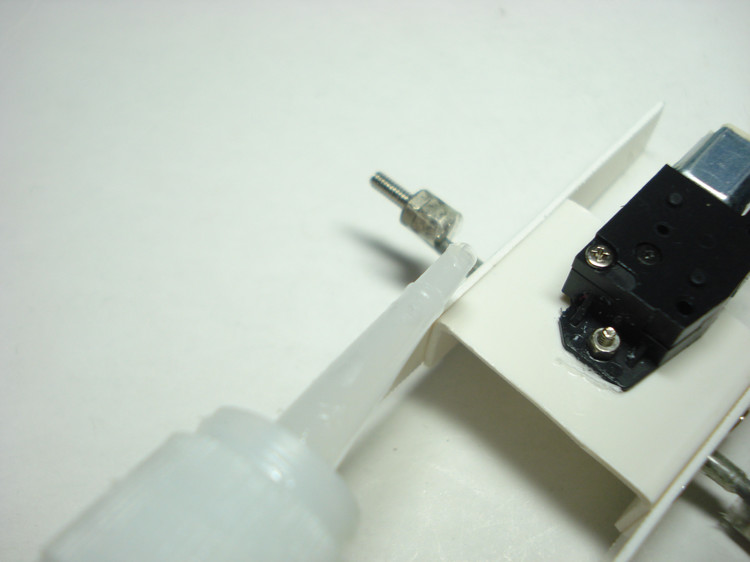
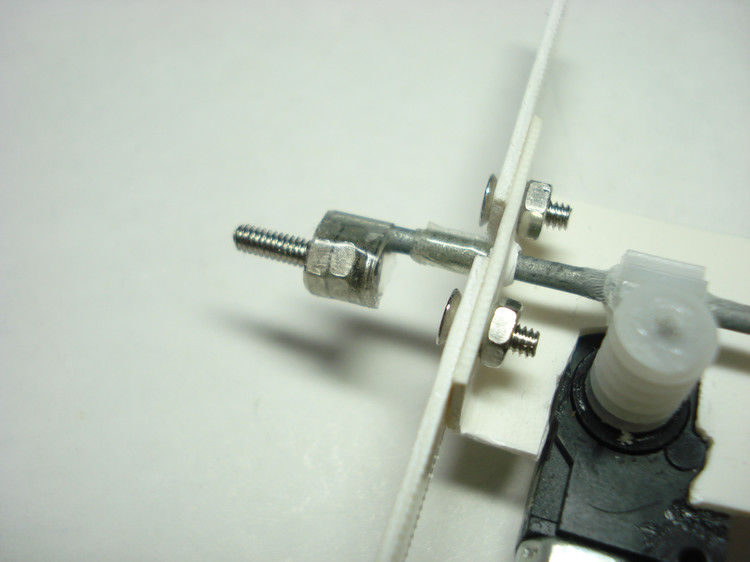
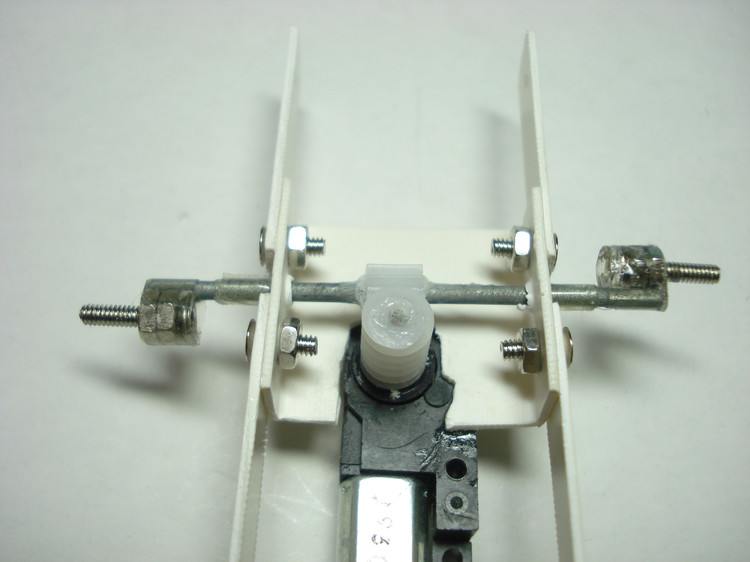
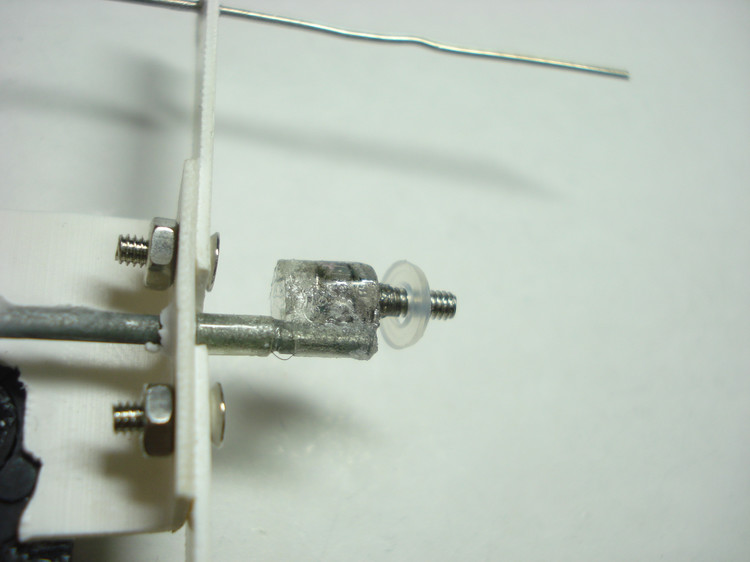
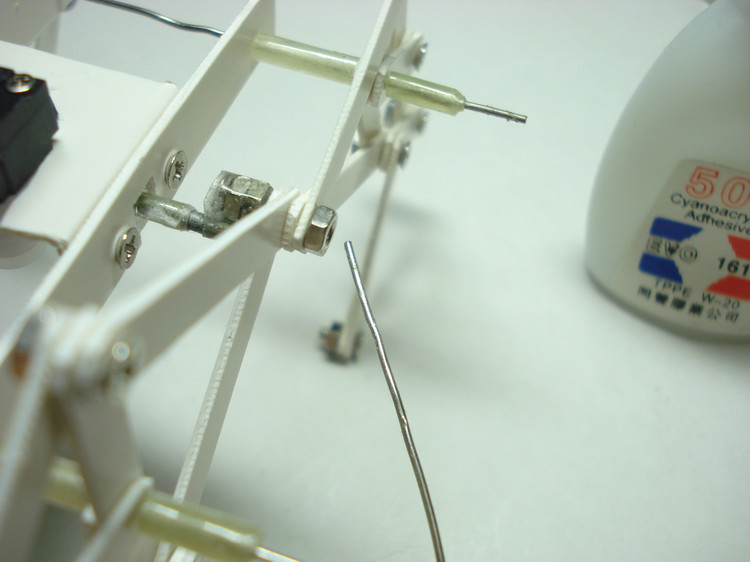
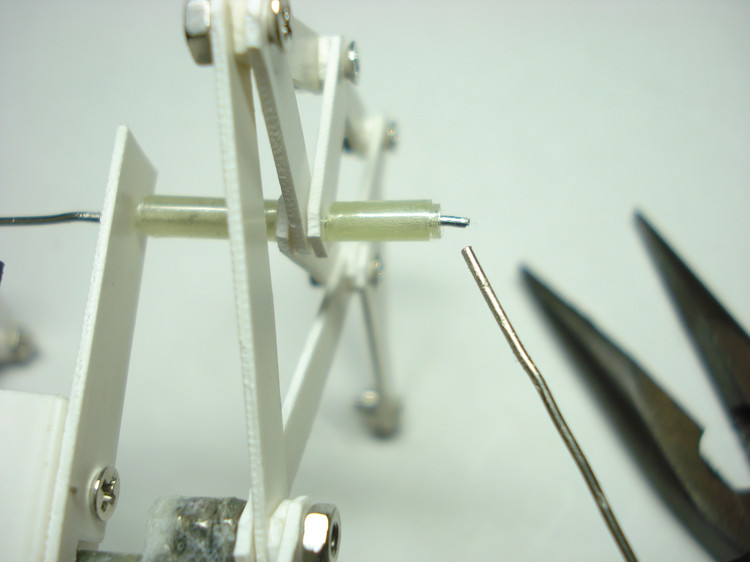
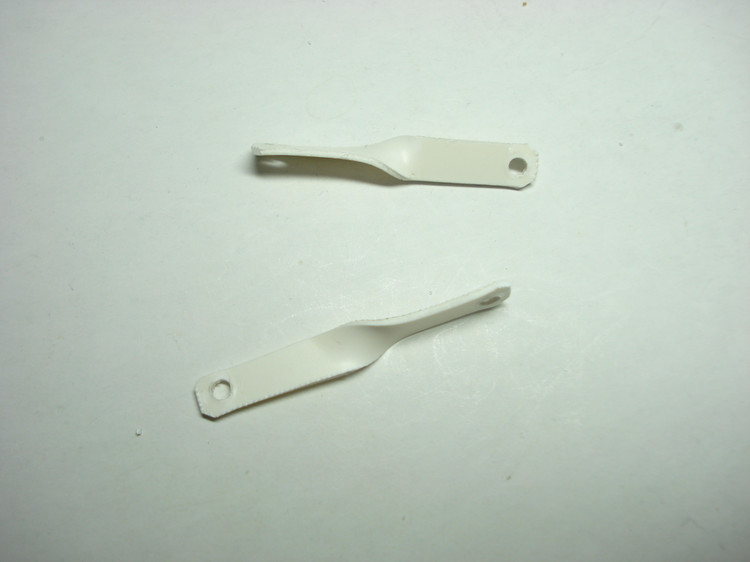
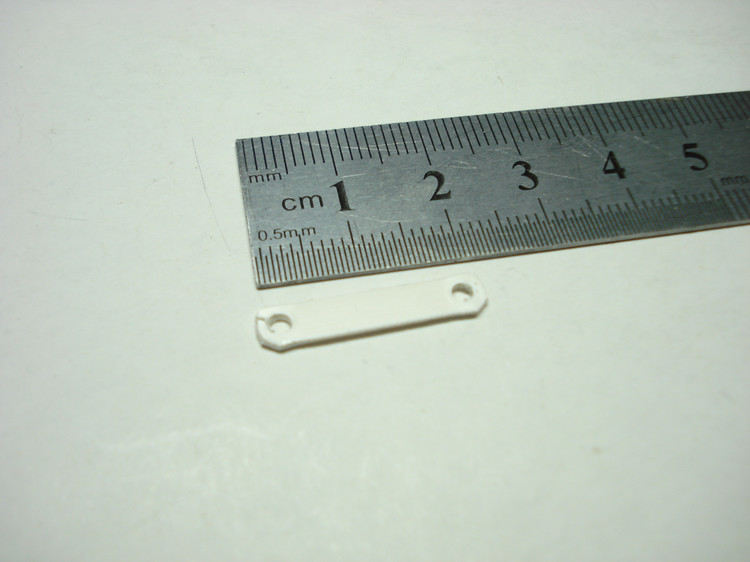
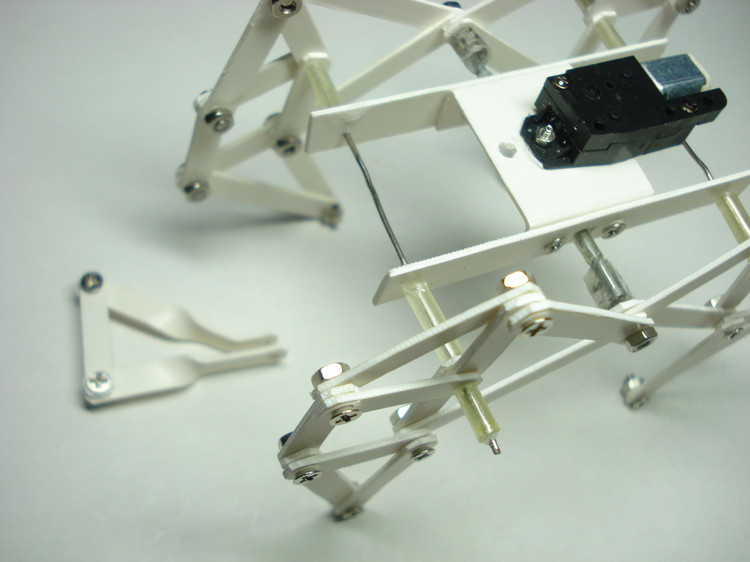
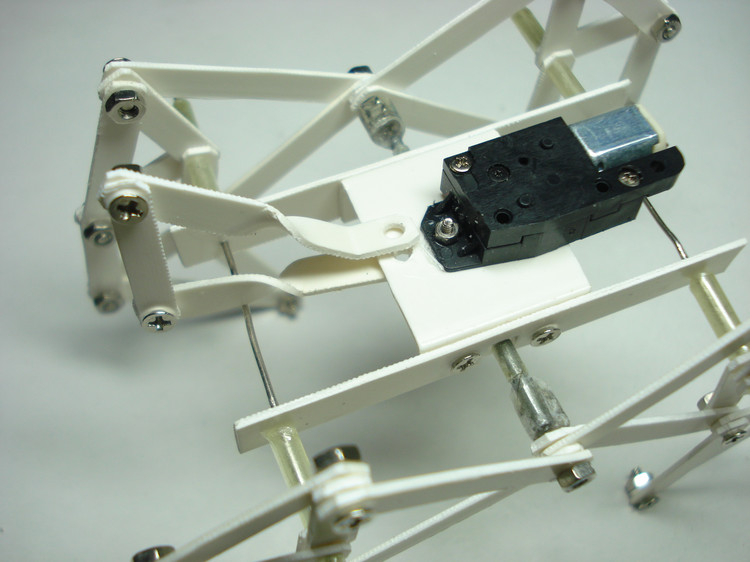
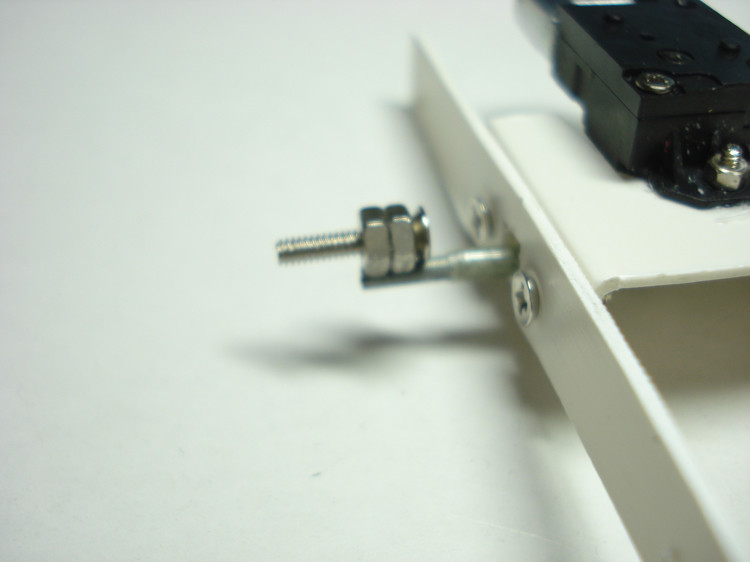
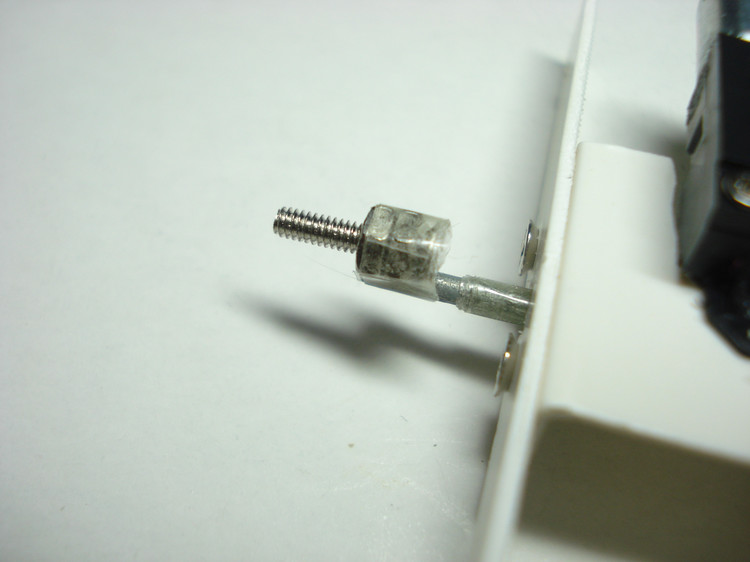
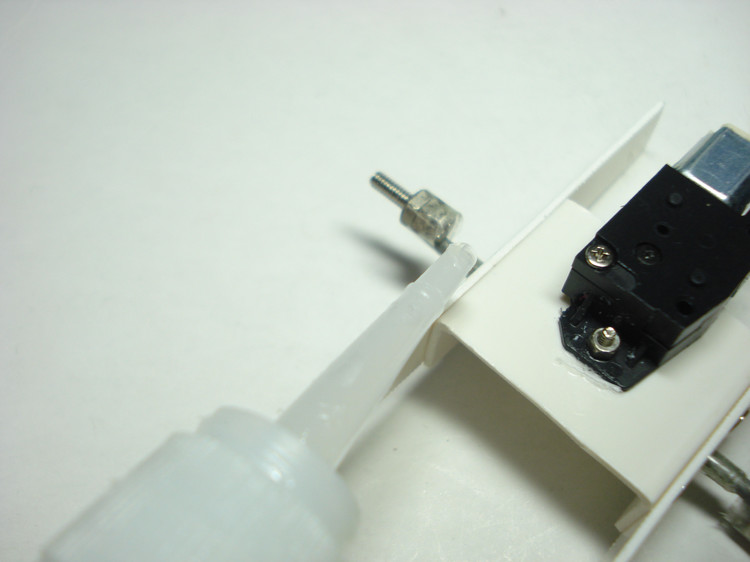
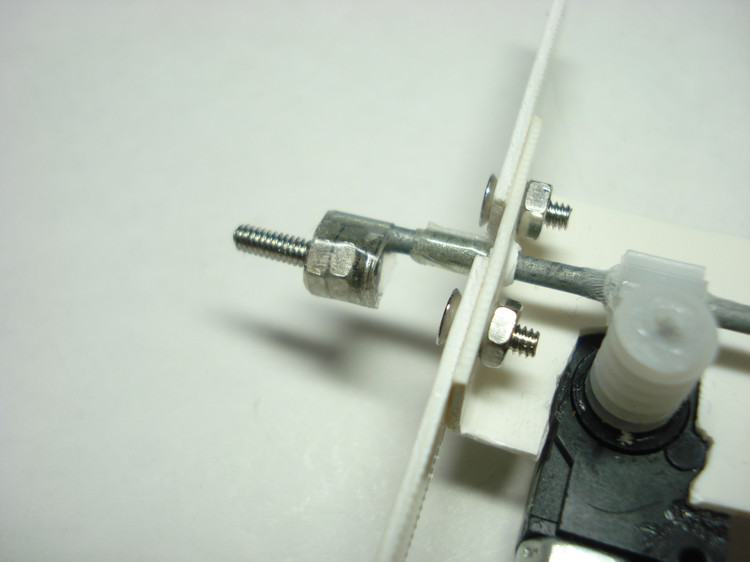
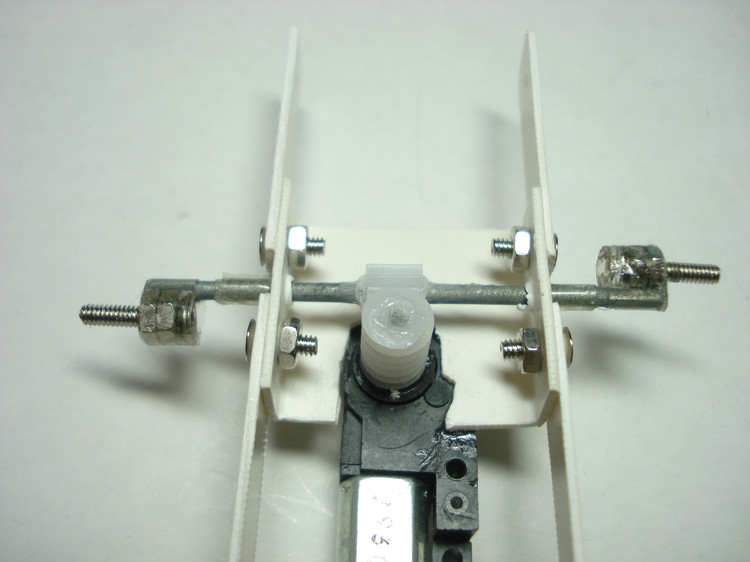
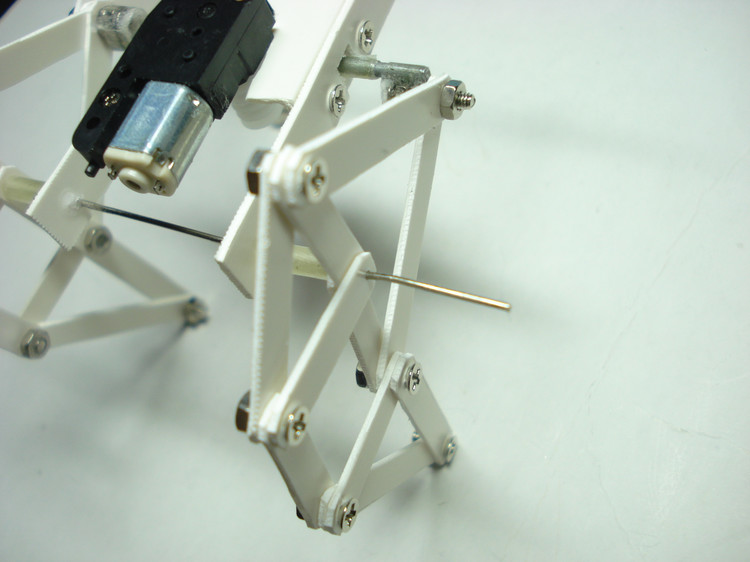
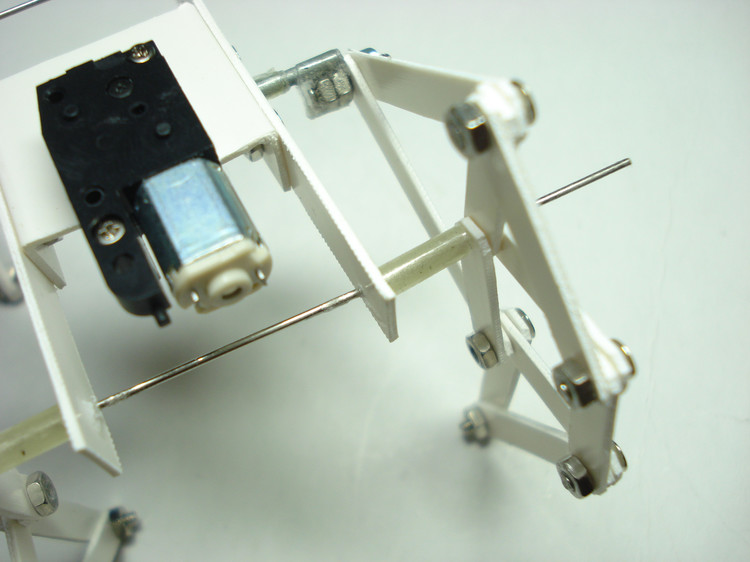
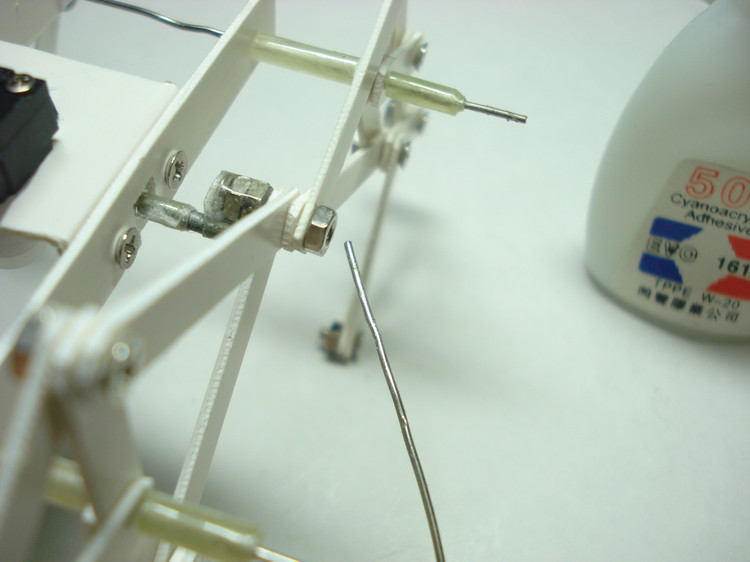
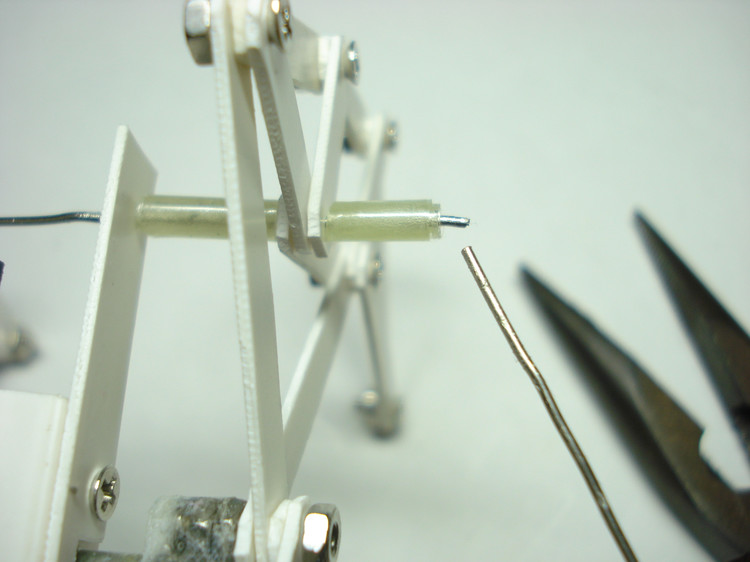
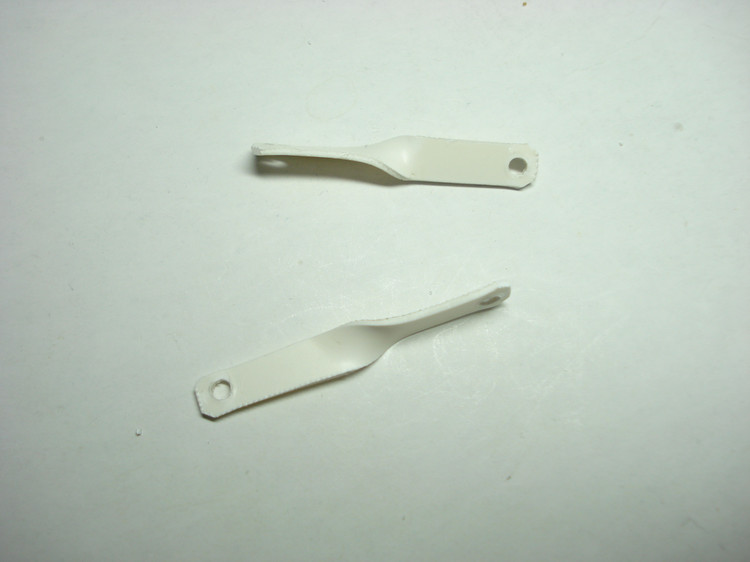
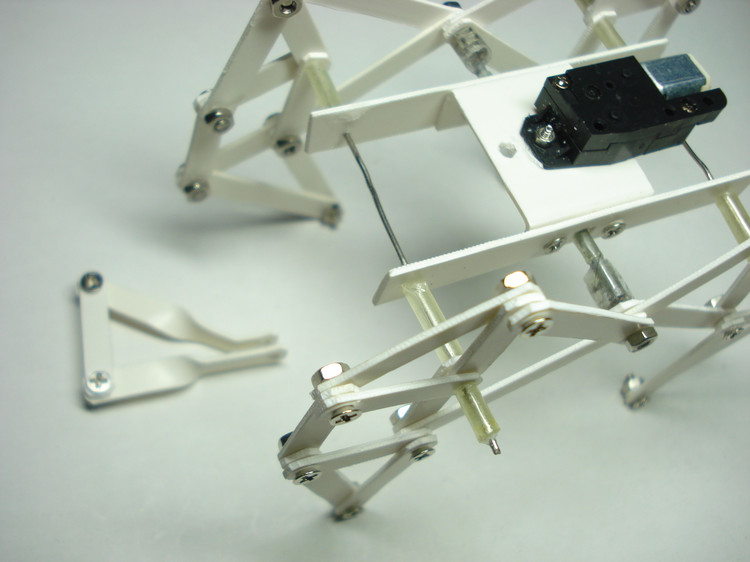
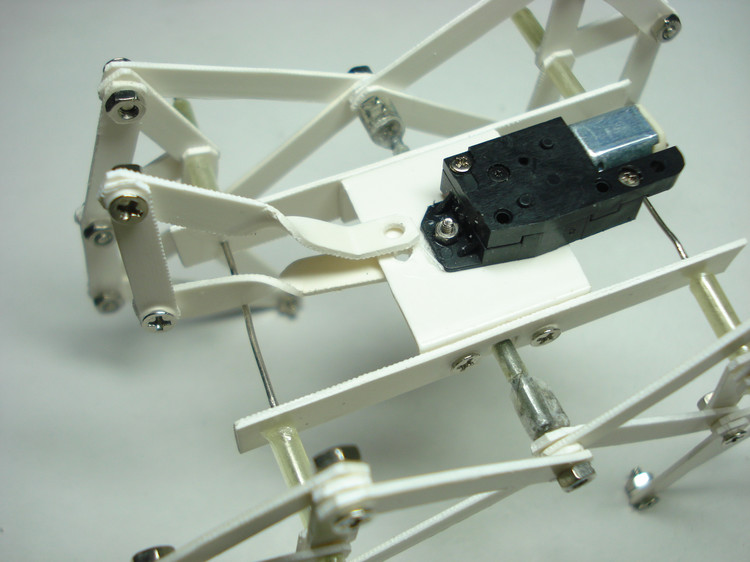
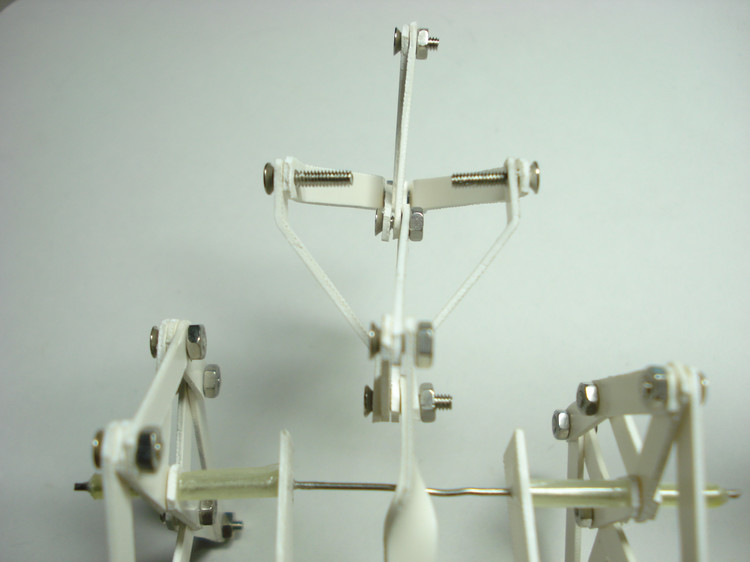
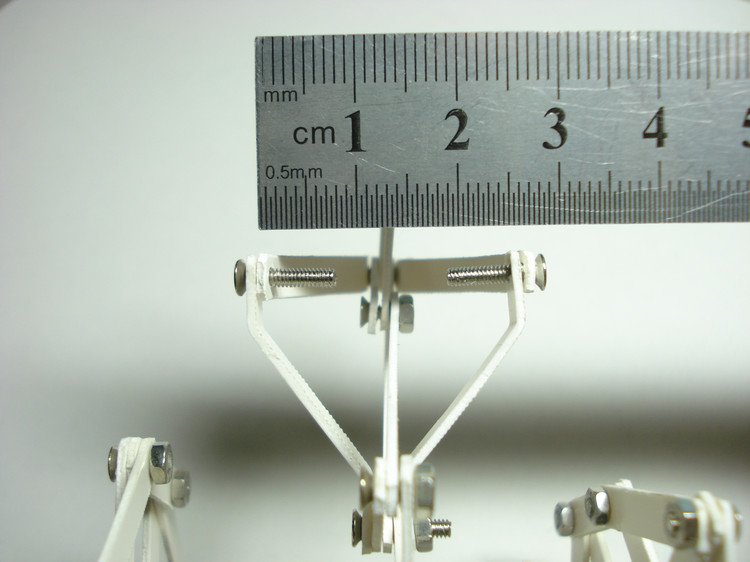
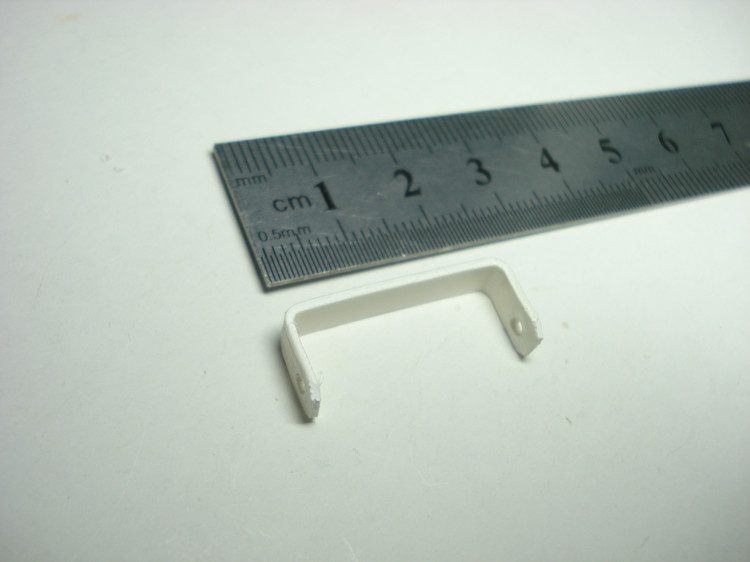
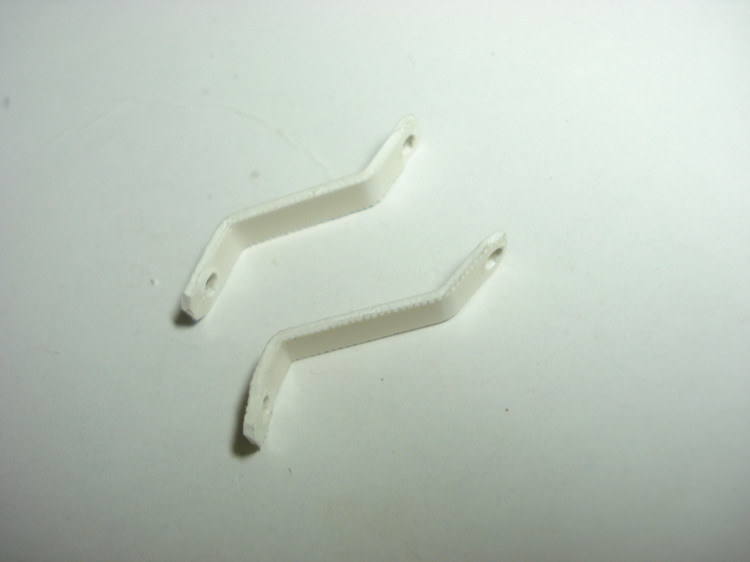
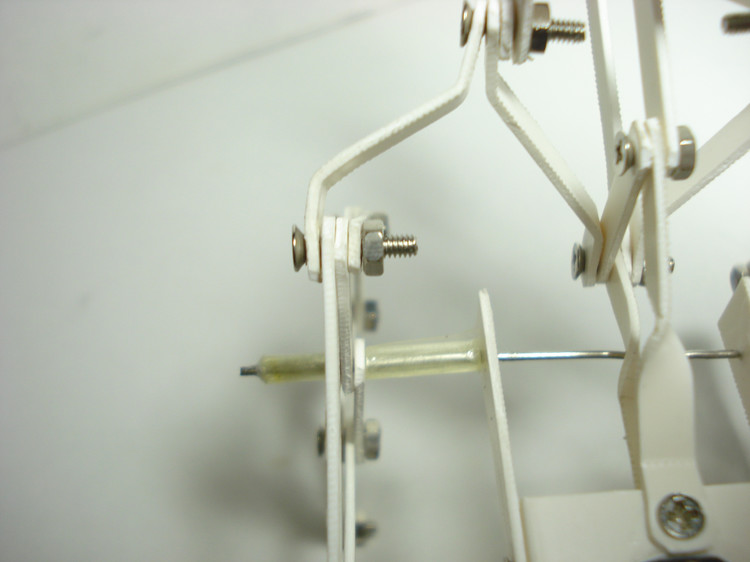
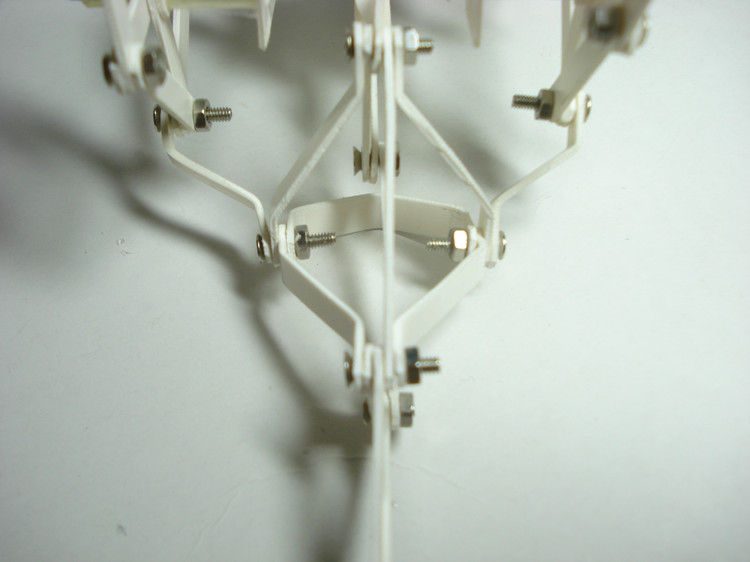
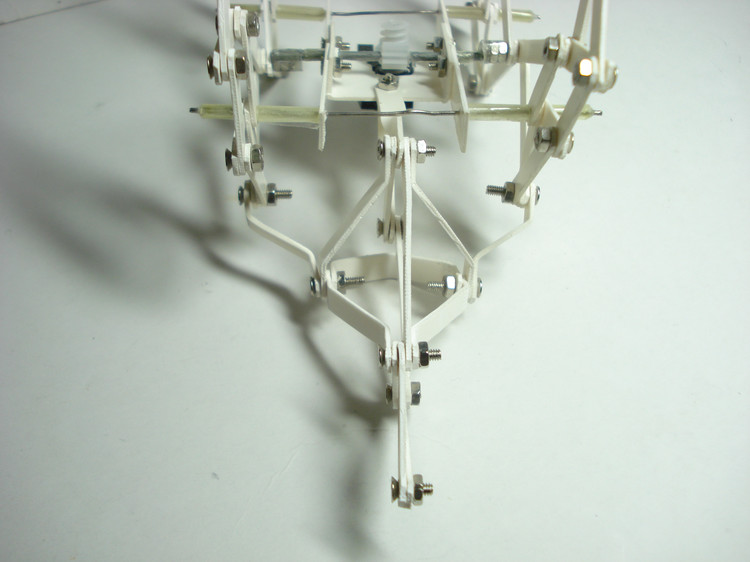
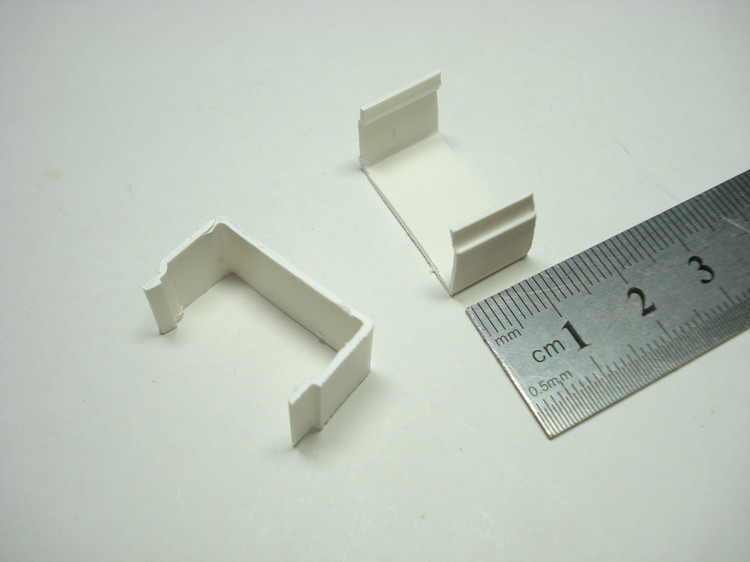
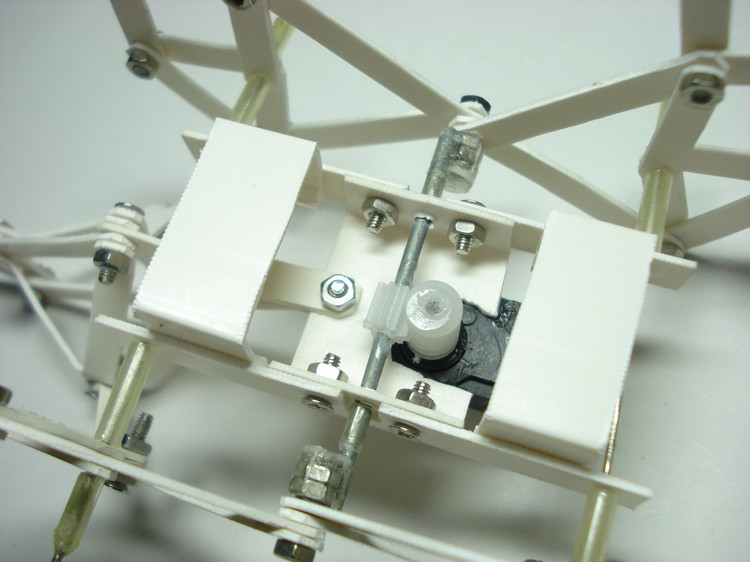
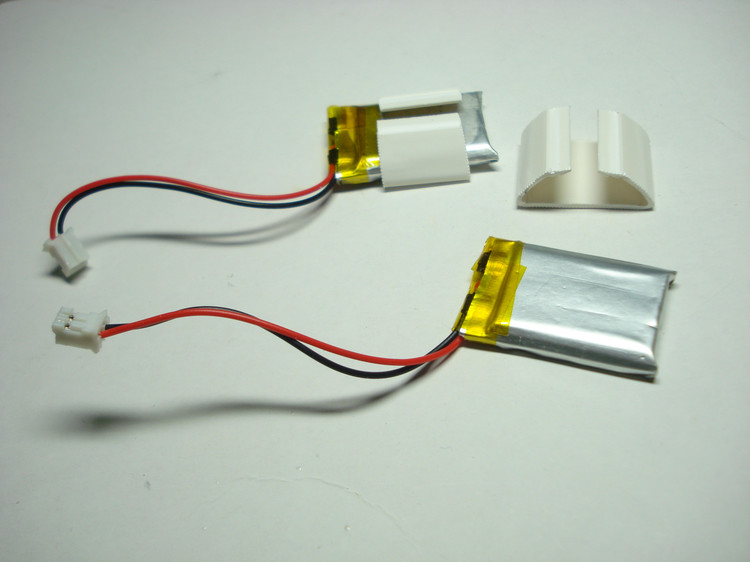
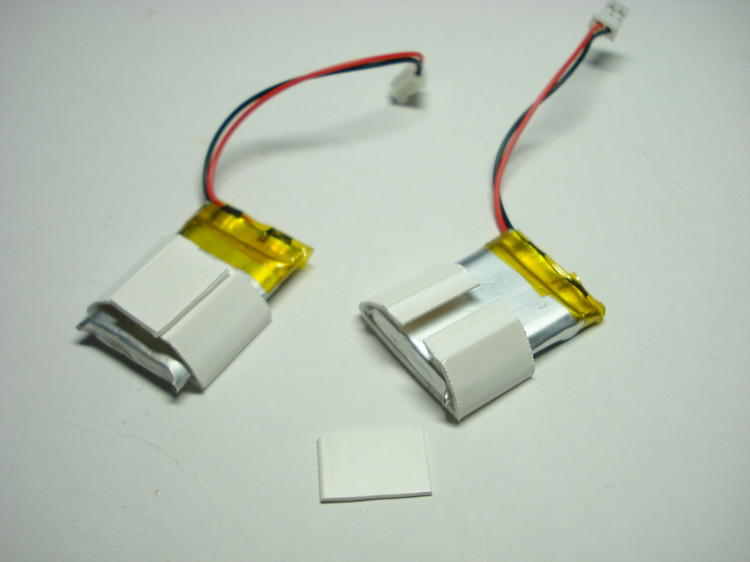
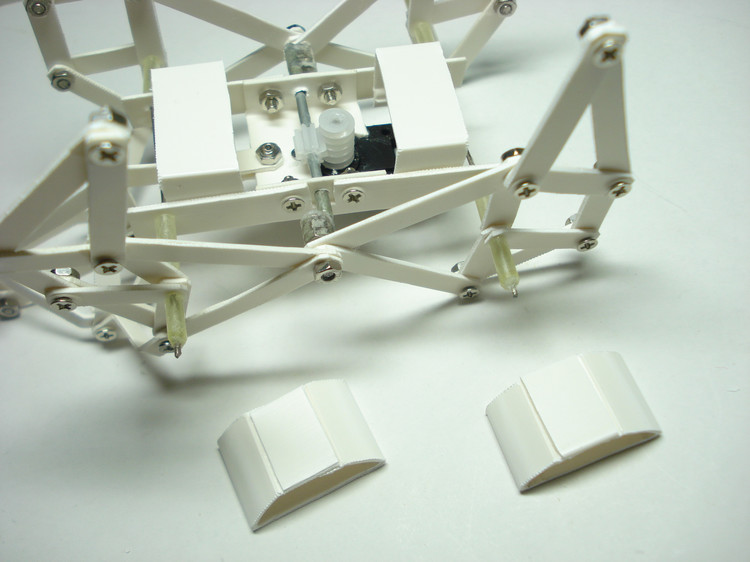
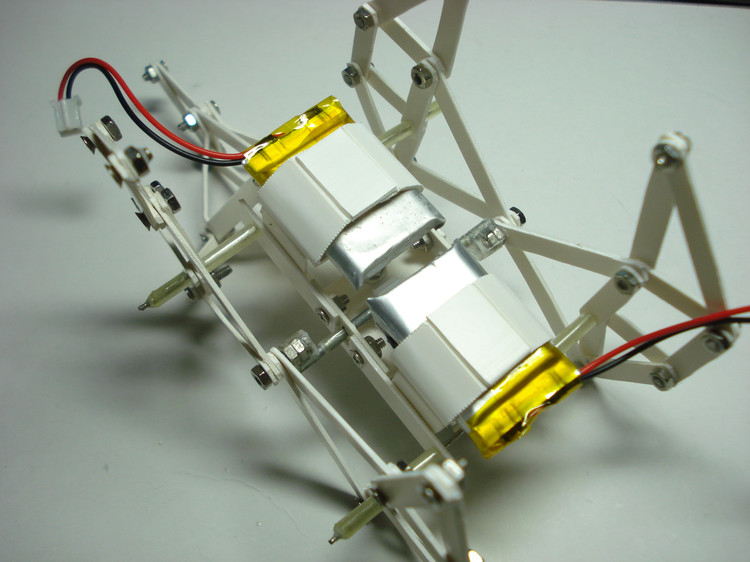
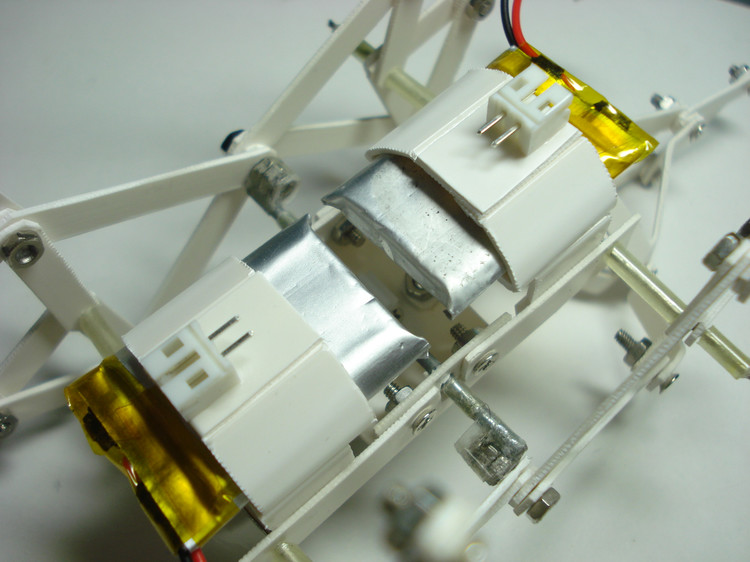
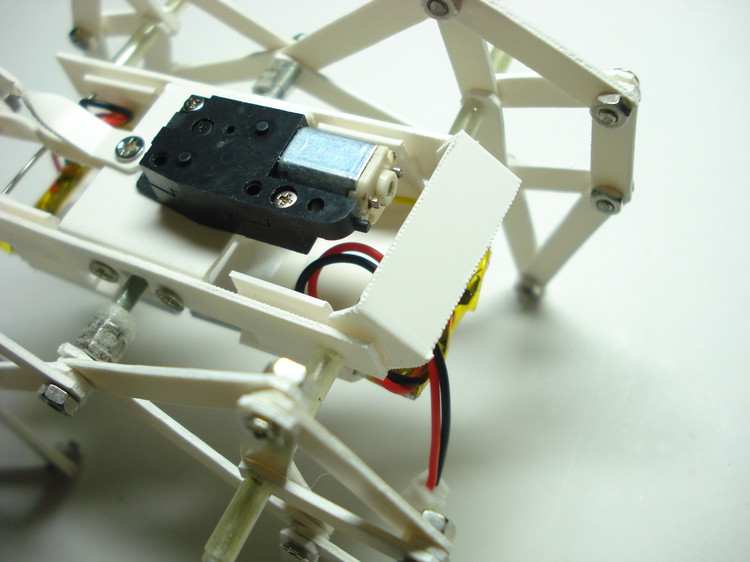
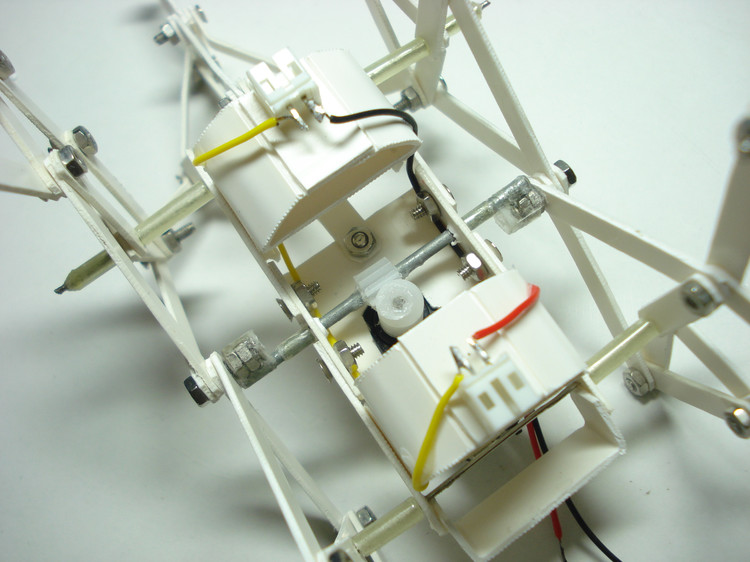
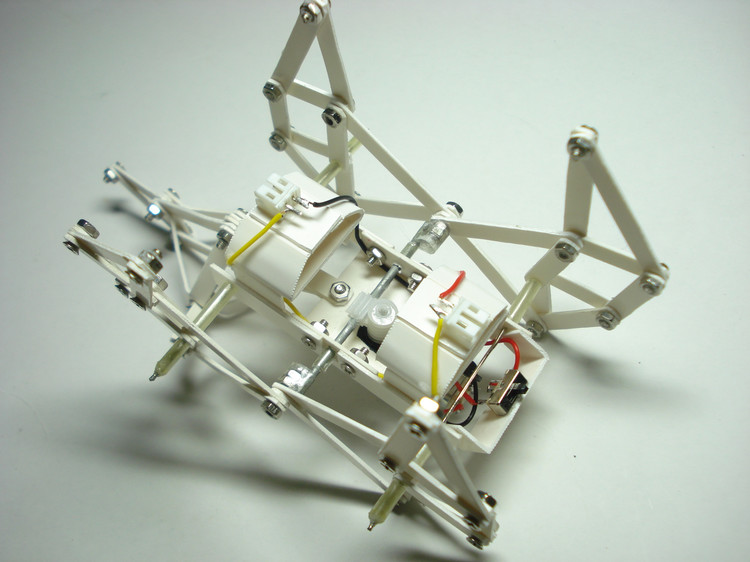
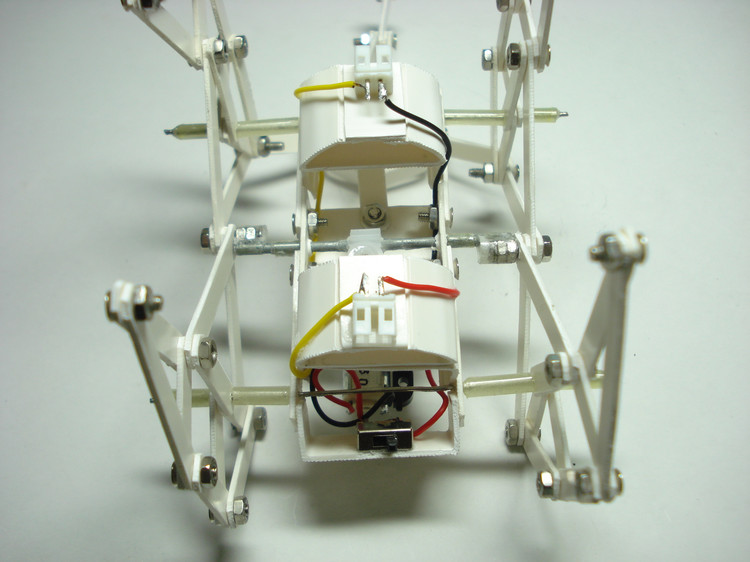
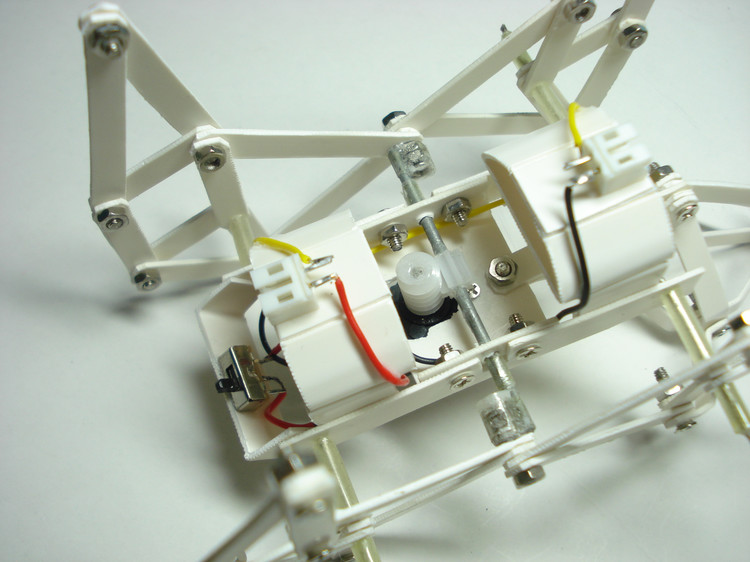
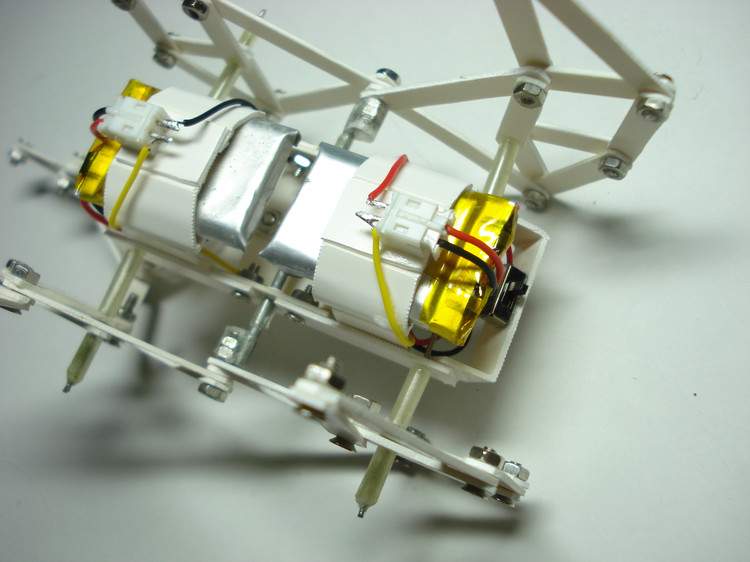
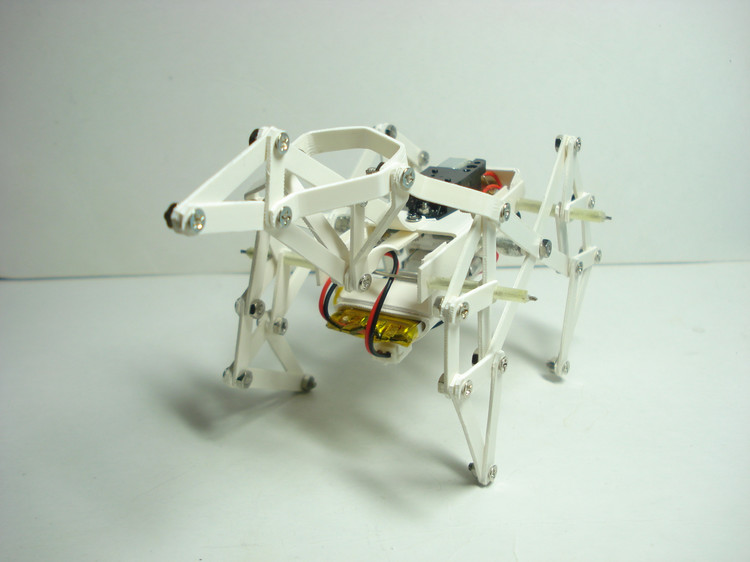
把拉直作为限位杆的两根曲别针,分别穿过两侧的外壳侧板小孔,看限位杆是否平行对齐,假如不够端正还需要重新调整限位杆的小孔位置。 (3)传动 本项目与之前所有用到曲柄的项目不同,本项目要求曲柄的长度(即曲柄半径)尽可能小,所以没有用PVC制作曲柄,而是直接用曲柄轴紧挨着减速箱输出轴固定起来。 取两颗M2*10的螺丝,分别套上两颗M2的螺母,并且把螺母都扭紧,这是作为曲柄轴。 把曲柄轴直接挨着减速箱的输出轴。 用透明胶带将曲柄轴上的两颗螺母与减速箱的输出轴绑扎在一起。 并且滴上502胶水将两者固定起来。 特别提醒:由于502胶水渗透性强,干得快,使用时要格外小心,如果没有控制好用量,轻则会把不该粘住的东西粘起来了,严重的有可能会导致器件的损坏报废,一般建议使用前先试一下会不会出水孔过大一次性会滴出过多胶水,必要的时候可以用牙签之类的工具蘸着胶水涂到要粘贴的部位。 安装另一侧曲柄轴时,要求方向正好这原来的一侧相反,即一侧假如在减速箱输出轴的最左边,则另一侧就在最右边假如一侧在最上边,则另一侧就在最下面。 可以把减速箱反转过来,让装好一侧从原来位于减速箱输出轴顶端的变成位于底端,则继续在另一侧的顶端安装另一个曲柄轴。 将要组装整个肢体结构。 给曲柄轴上套上一个塑料垫片。 把一条后腿套到限位杆上,并且传动连杆套到曲柄轴上。 这时把后腿顶端的关节铰链螺母也蘸上少量502胶水进行固定。注意:这里只是针对两个后腿的顶部关节铰链螺母。 把两个后腿安装好后,再安装两个前腿。 用透明胶带反复缠绕拉直的曲别针,卷成管状,作为限位胶管。 在限位杆与腿部之间套上长度适合的胶管,确保腿部结构装到曲柄轴上后,能够与躯干外壳平行。 再在限位杆外侧也套上胶管,稍微加紧腿部结构,让其不至于在限位杆上摆动过大或脱离限位杆。 把腿部的传动连杆套到曲柄轴上后,在曲柄轴外侧再扭入固定螺母。 这个时候可以尝试给减速电机的两根电极接上导线,再连接电源,看整体结构驱动是否顺畅。 假如整体结构能够比较顺畅的活动的时候,可以把曲柄轴外侧的螺母蘸上少量502胶水固定起来。 特别提醒:由于502胶水渗透性强,干得快,使用时要格外小心,如果没有控制好用量,轻则会把不该粘住的东西粘起来了,严重的有可能会导致器件的损坏报废,一般建议使用前先试一下会不会出水孔过大一次性会滴出过多胶水,必要的时候可以用牙签之类的工具蘸着胶水涂到要粘贴的部位。 然后限位杆外侧的胶管也涂上少量502胶水固定起来。 下面制作颈部。 分别剪两根长3.5CM和3CM,宽都为0.5CM的PVC方条,然后在两侧都打上2mm的小孔,并且把四角都剪成圆角。 用尖嘴钳夹住两根PVC方条的中部进行扭折,呈如下形状,即方条两端小孔处的平面是互相垂直的。 再剪一根长2CM、宽0.5CM左右的PVC方条,并且在两侧边缘都打上2mm的小孔,并且把四角都剪成圆角。 把以上三根PVC方条如下图所示用M2*6螺丝/螺母组装起来,做成颈部底座结构。 在减速箱外壳顶部前端打上1个直径2mm的小孔。 把颈部底座结构如下图所示安装到减速箱外壳上,并用M2*6螺丝/螺母固定起来。 把拉直作为限位杆的两根曲别针,分别穿过两侧的外壳侧板小孔,看限位杆是否平行对齐,假如不够端正还需要重新调整限位杆的小孔位置。 本项目与之前所有用到曲柄的项目不同,本项目要求曲柄的长度(即曲柄半径)尽可能小,所以没有用PVC制作曲柄,而是直接用曲柄轴紧挨着减速箱输出轴固定起来。 取两颗M2*10的螺丝,分别套上两颗M2的螺母,并且把螺母都扭紧,这是作为曲柄轴。 把曲柄轴直接挨着减速箱的输出轴。 用透明胶带将曲柄轴上的两颗螺母与减速箱的输出轴绑扎在一起。 并且滴上502胶水将两者固定起来。 特别提醒:由于502胶水渗透性强,干得快,使用时要格外小心,如果没有控制好用量,轻则会把不该粘住的东西粘起来了,严重的有可能会导致器件的损坏报废,一般建议使用前先试一下会不会出水孔过大一次性会滴出过多胶水,必要的时候可以用牙签之类的工具蘸着胶水涂到要粘贴的部位。 安装另一侧曲柄轴时,要求方向正好这原来的一侧相反,即一侧假如在减速箱输出轴的最左边,则另一侧就在最右边假如一侧在最上边,则另一侧就在最下面。 可以把减速箱反转过来,让装好一侧从原来位于减速箱输出轴顶端的变成位于底端,则继续在另一侧的顶端安装另一个曲柄轴。 将要组装整个肢体结构。 给曲柄轴上套上一个塑料垫片。 把一条后腿套到限位杆上,并且传动连杆套到曲柄轴上。 这时把后腿顶端的关节铰链螺母也蘸上少量502胶水进行固定。注意:这里只是针对两个后腿的顶部关节铰链螺母。 把两个后腿安装好后,再安装两个前腿。 用透明胶带反复缠绕拉直的曲别针,卷成管状,作为限位胶管。 在限位杆与腿部之间套上长度适合的胶管,确保腿部结构装到曲柄轴上后,能够与躯干外壳平行。 再在限位杆外侧也套上胶管,稍微加紧腿部结构,让其不至于在限位杆上摆动过大或脱离限位杆。 把腿部的传动连杆套到曲柄轴上后,在曲柄轴外侧再扭入固定螺母。 这个时候可以尝试给减速电机的两根电极接上导线,再连接电源,看整体结构驱动是否顺畅。 假如整体结构能够比较顺畅的活动的时候,可以把曲柄轴外侧的螺母蘸上少量502胶水固定起来。 特别提醒:由于502胶水渗透性强,干得快,使用时要格外小心,如果没有控制好用量,轻则会把不该粘住的东西粘起来了,严重的有可能会导致器件的损坏报废,一般建议使用前先试一下会不会出水孔过大一次性会滴出过多胶水,必要的时候可以用牙签之类的工具蘸着胶水涂到要粘贴的部位。 然后限位杆外侧的胶管也涂上少量502胶水固定起来。 下面制作颈部。 分别剪两根长3.5CM和3CM,宽都为0.5CM的PVC方条,然后在两侧都打上2mm的小孔,并且把四角都剪成圆角。 用尖嘴钳夹住两根PVC方条的中部进行扭折,呈如下形状,即方条两端小孔处的平面是互相垂直的。 再剪一根长2CM、宽0.5CM左右的PVC方条,并且在两侧边缘都打上2mm的小孔,并且把四角都剪成圆角。 把以上三根PVC方条如下图所示用M2*6螺丝/螺母组装起来,做成颈部底座结构。 在减速箱外壳顶部前端打上1个直径2mm的小孔。 把颈部底座结构如下图所示安装到减速箱外壳上,并用M2*6螺丝/螺母固定起来。 剪三根长度分别是4CM、3.5CM、1.5CM,宽度都为0.5CM的PVC方条,在两侧都打上直径2mm的小孔,并且把四角都剪成圆角。 把以上三根PVC方条如图所示借助M2*6的螺丝螺母固定到颈部底座上,完成整个颈部的安装。 剪两根长分别为3CM、2.5CM,宽都为0.5CM的PVC方条,两个边缘都打上直径2mm的小孔,并且把四角都剪成圆角。 把以上两根PVC方条如图所示借助M2*6螺丝/螺母固定到颈部结构上,做成头部结构。 再剪四根长3CM、宽0.5CM的PVC方条,在两侧边缘都打上直径2mm的小孔,四角也都剪成圆角。 用尖嘴钳把以上四根PVC方条折成如下形状的头部与颈部骨架。 把以上四根头部与颈部骨架如图所示安装到头部与颈部的结构上,即先拆下原来各关节的M2*6螺丝/螺母,套上这些连杆后再把螺丝/螺母装起来。 对于身体同侧两根骨架,要对接在一起(即下图中还没有上螺丝/螺母的部分)。 把同侧两根骨架的接合部分,套上M2*10的螺丝。 适当调整各骨架弯折的角度,让两组骨架接合部分之间的距离大概为2.5CM左右。 剪一根长4.5CM、宽0.5CM左右的PVC方条,把其用尖嘴钳弯折成如下图形状,其中两侧的距离为2.5CM左右,做成支架。 把该支架装到前面两组骨架接合部中间,也套到M2*10的螺丝上。 用直尺一组骨架结合部到前腿顶端关节的距离,比如大概为2CM左右。 剪两根长3CM、宽0.5CM左右的PVC方条,在两侧边缘都打上直径2mm的小孔,四角豆剪成圆角。 把两根方条借助尖嘴钳折成如下形状,作为头部与腿部间的骨架连杆。 把该骨架连杆装到腿部与头颈骨架接合部之间,并把相关的螺丝/螺母都拧上。 注意:这个时候考虑叠在一起的PVC厚度比较大,需要把前腿顶部的关节铰链的M2*6螺丝换成M2*10的螺丝。 另外,因为叠在一起的PVC厚度比较大,头部底下的螺丝也可以考虑换成M2*10的螺丝。 同样的,颈部与颈部底座下面的螺丝也可以换成M2*10的螺丝。 选宽度为2.5CM线槽的凹槽部分,剪大约长为1CM的两段,作为支架。 把支架装到减速箱底部,用502胶水粘帖好。 宽度为2.5CM线槽的凹槽部分,剪大约长为2CM的两段,弯折把锂电池包在里面,做成电池夹。 在电池夹开口处用一块小PVC方块封好,用502胶水固定好。 把做好的电池夹,借助502胶水固定到支架上。 尝试把锂电池装上。 把PH插座用502胶水固定在电池夹顶部封口板上。 特别提醒:由于502胶水渗透性强,干得快,使用时要格外小心,如果没有控制好用量,轻则会把不该粘住的东西粘起来了,严重的有可能会导致器件的损坏报废,一般建议使用前先试一下会不会出水孔过大一次性会滴出过多胶水,必要的时候可以用牙签之类的工具蘸着胶水涂到要粘贴的部位。 选宽度为2.5CM左右的PVC线槽的凹槽部分,剪大约长1CM的一端,把两侧凹槽卡口部分剪掉,作为尾部支架。 把尾部支架装到减速箱外壳侧板的后部内侧。 按照电路原理图或者焊接示意图把电路接好。
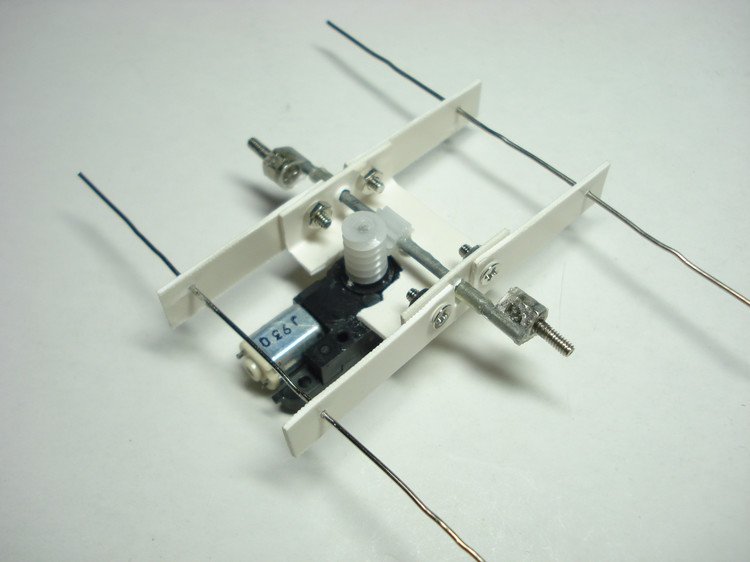
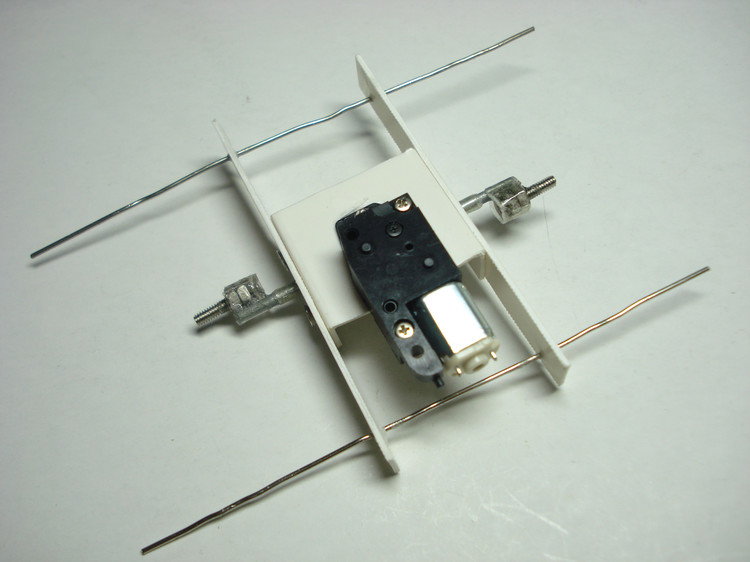
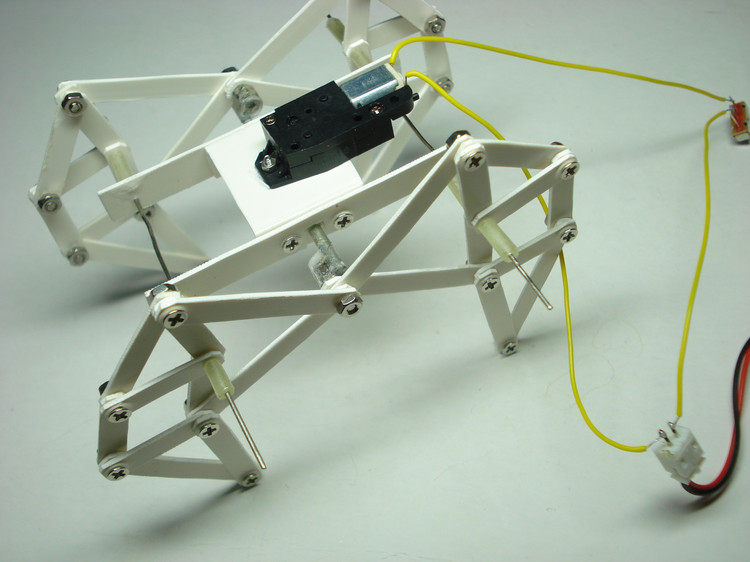
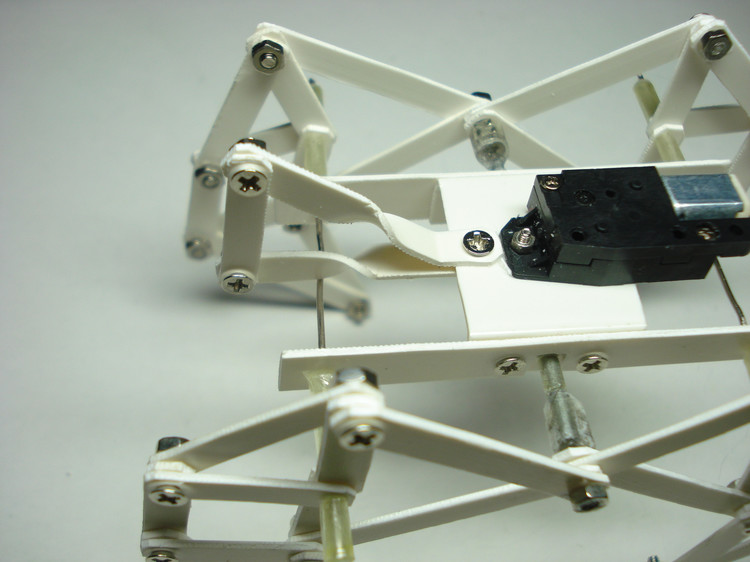
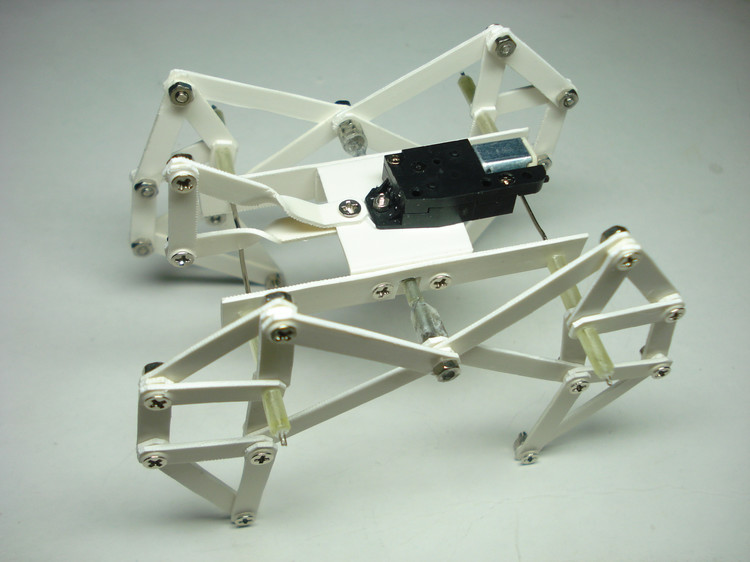
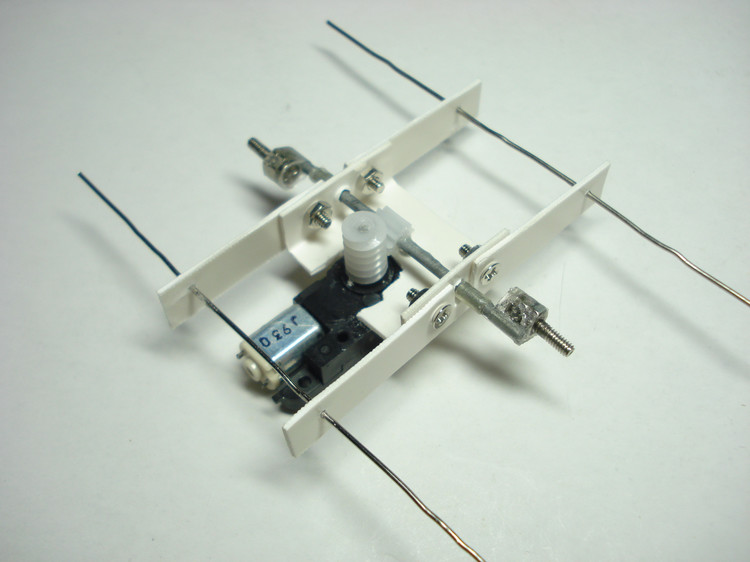
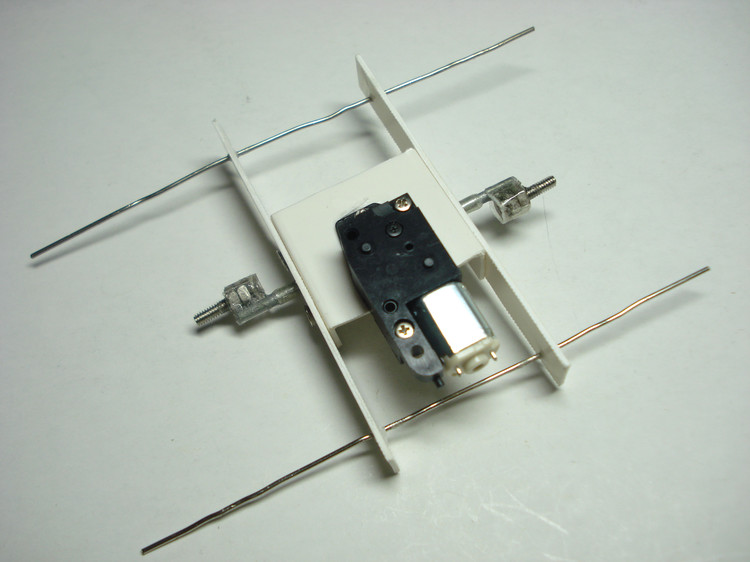
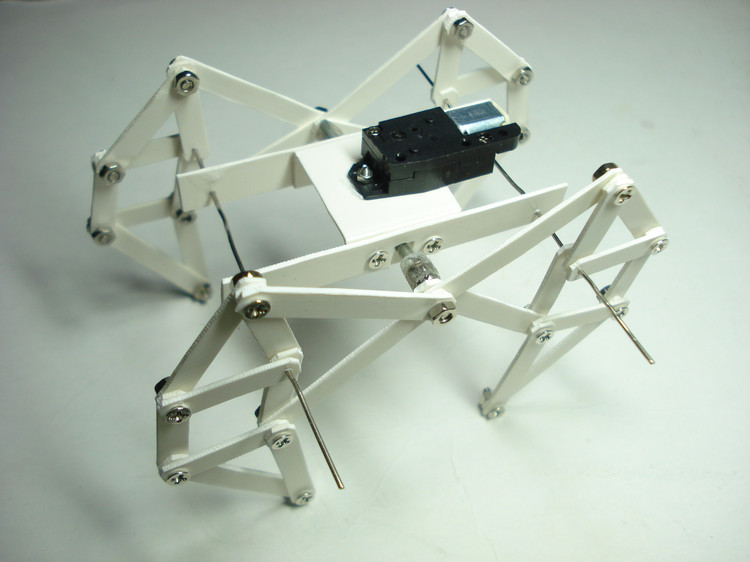
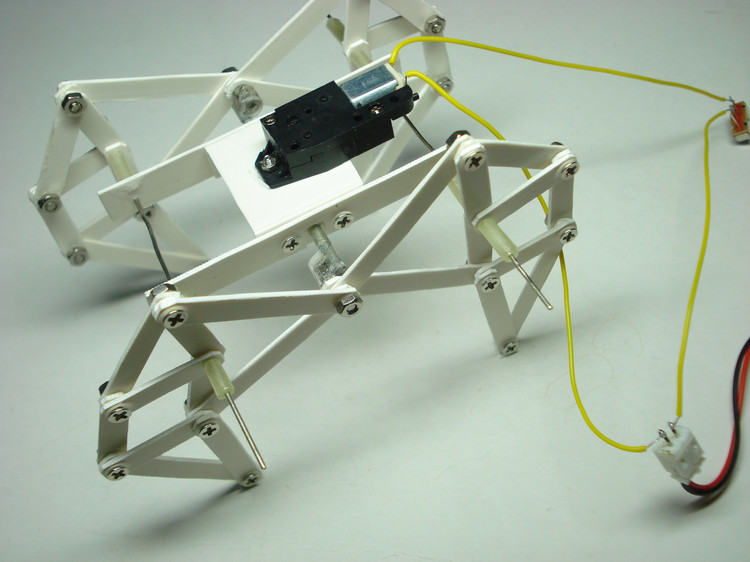
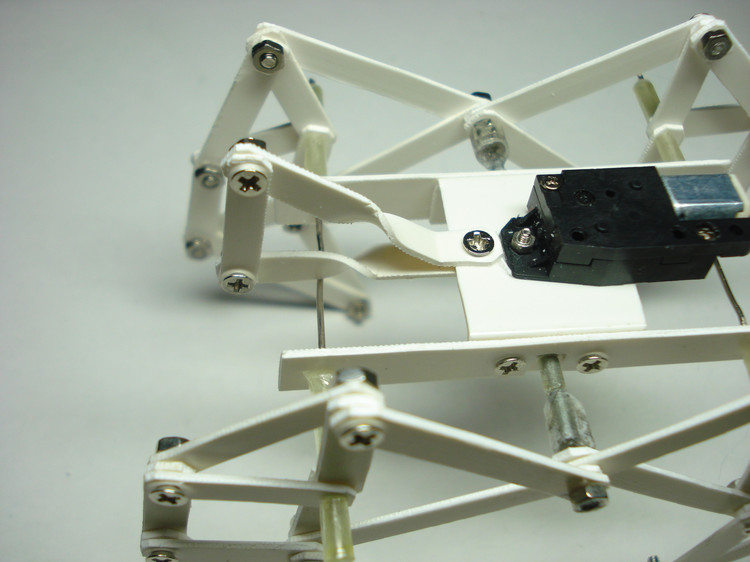
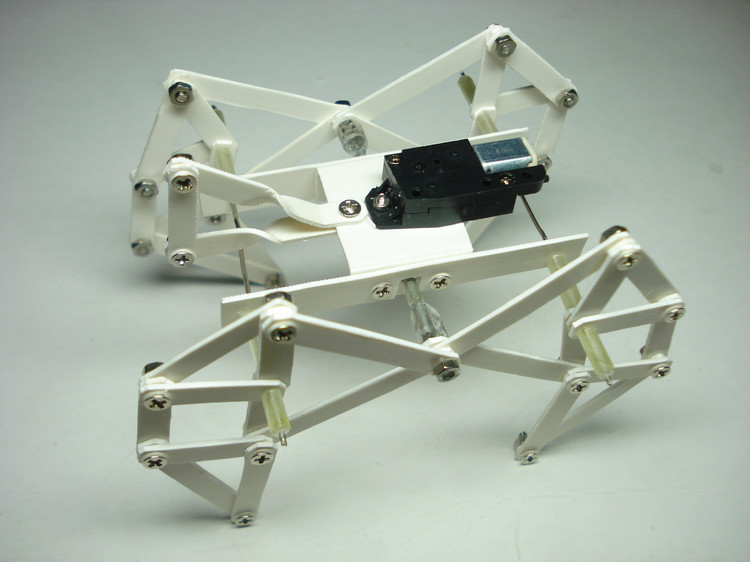
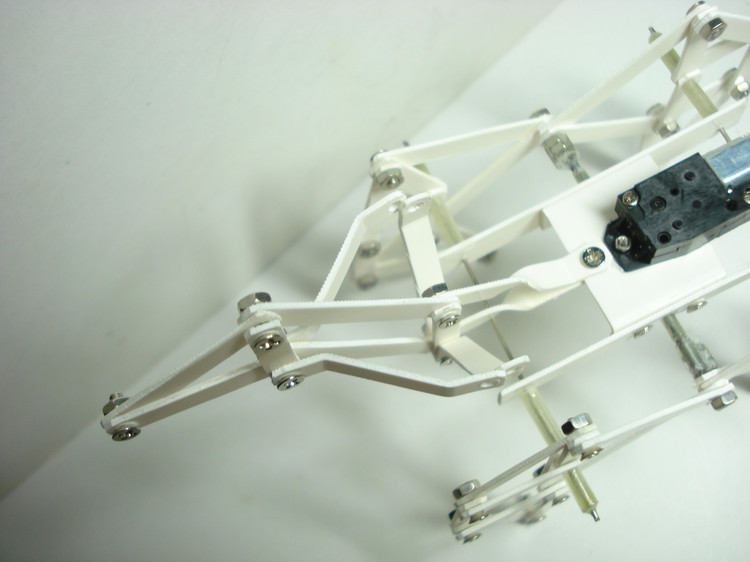
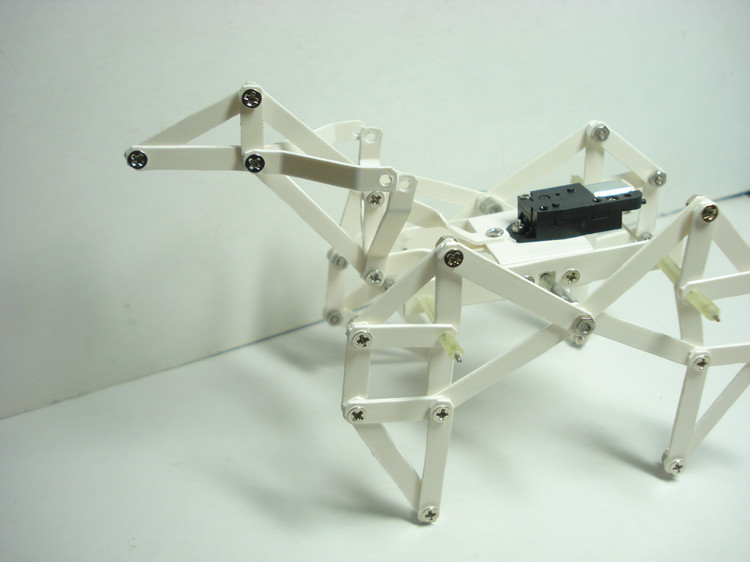
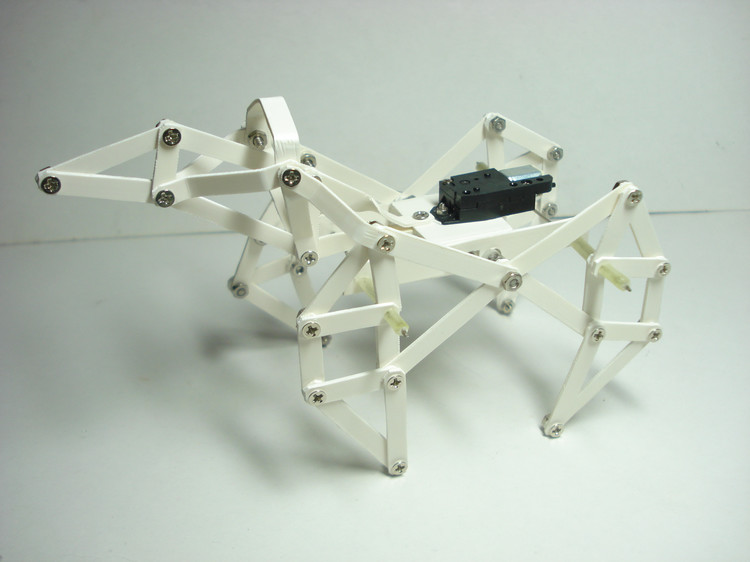
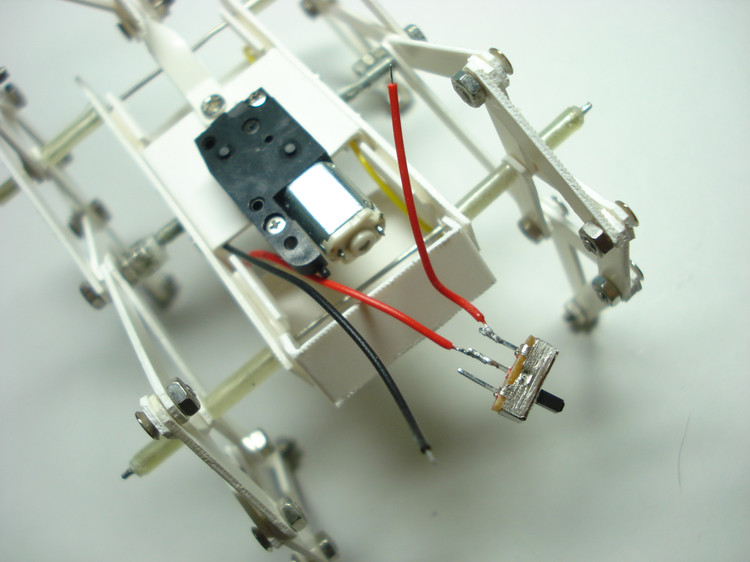
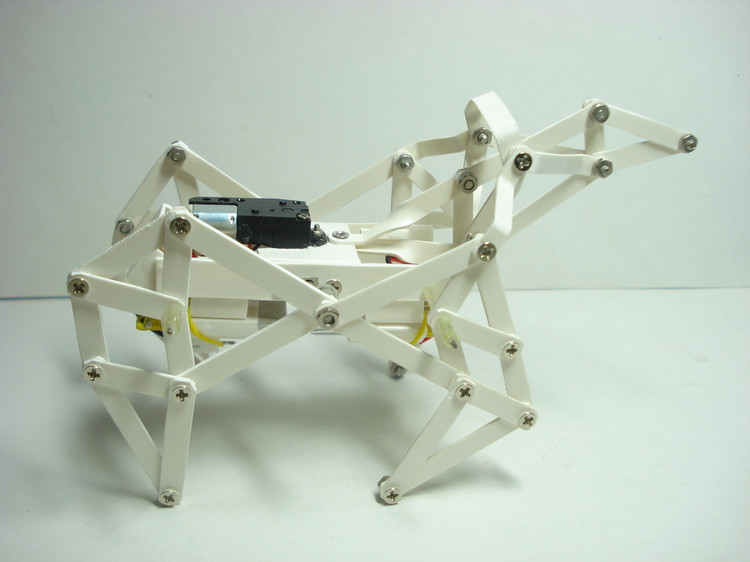
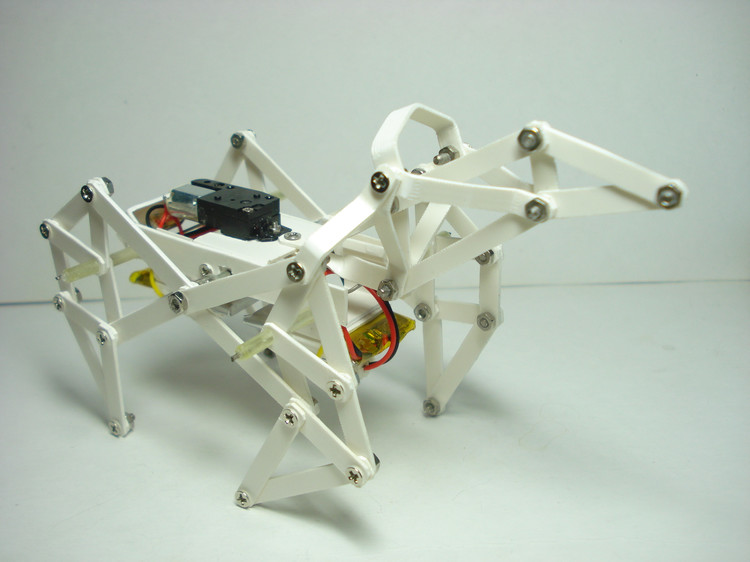
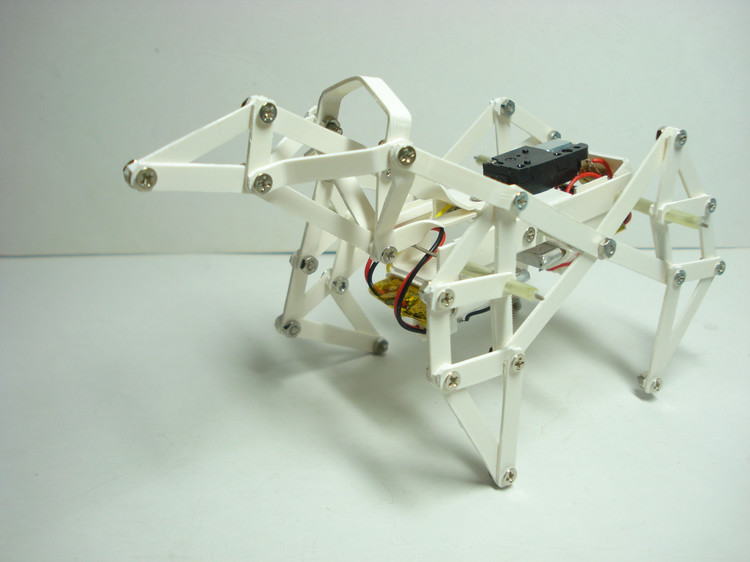
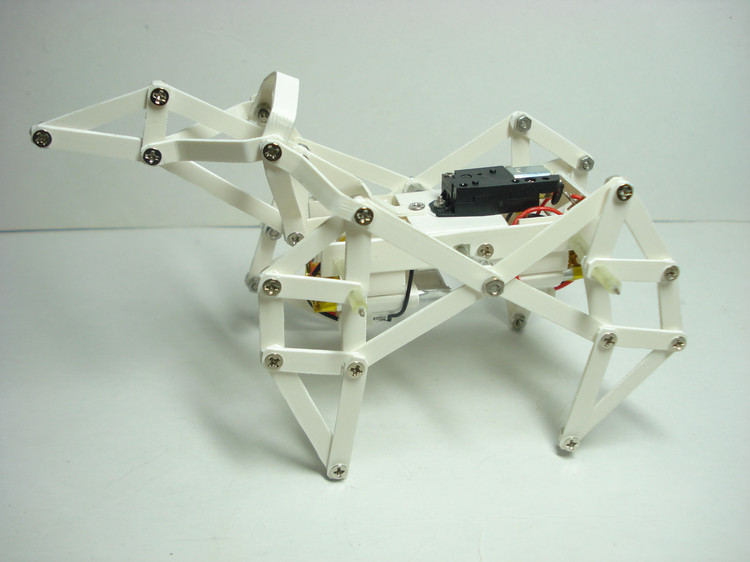
因为要用502胶水固定拨动开关,所以拨动开关一侧的外壳最好用锉刀挫钝了。 把尾部支架向后下部倾斜,并用502胶水固定起来。而拨动开关蘸上少量502胶水,固定到尾部支架内侧。 特别提醒:由于502胶水渗透性强,干得快,使用时要格外小心,如果没有控制好用量,轻则会把不该粘住的东西粘起来了,严重的有可能会导致器件的损坏报废,一般建议使用前先试一下会不会出水孔过大一次性会滴出过多胶水,必要的时候可以用牙签之类的工具蘸着胶水涂到要粘贴的部位。 把锂电池都装到电池夹中,并且把锂电池的PH插头插到电池夹的PH插座上。 打开拨动开关,测试整体的运动效果。 最常见的问题就是容易关节被卡住,减速电机转不动,这主要是要检查和调整各部分结构,尤其是要保证各关节要有一定的松动空间,则联动运行的效果才能够顺畅。 如果出现被卡住的情况,仔细观察看看有哪个部分有可能导致被卡住的。 常见的情况包括: 1、某关节铰链的螺丝螺母太紧,这是时候可以强行把螺母松开一定空间; 2、假如是关节直接被502胶水粘死了,这个时候就要想办法把502胶水清除(具体见: 以上是按照配置两个锂电池的制作过程,假如是选择配一个锂电池的,请相应减少对应的电池夹等结构即可,具体不再赘述。 四、效果展示 以下是PVC-Robot 24号完成组装后的整体效果。 本项目是结构更为复杂的步履机器人,通过这个项目我们可以: 1、继续加深对四足仿生爬行原理的理解; 2、熟练掌握多连杆复合的结构的制作; 3、扩展更多连杆结构的认识。 本项目是作为本已经相当复杂的步履机器人的升级版,除了步履结构的腿部之外还增加了更多的连杆结构,要制作成功必须是拥有足够熟练的动手能力,外加足够的耐心。 本文已经刊登在: |