基于不同控制理念的两只爬虫机器人 作者:佚名 转贴自:http://www.hobbypress.cn/bencandy.php?fid-376-id-7472-page-1.htm 点击数:42
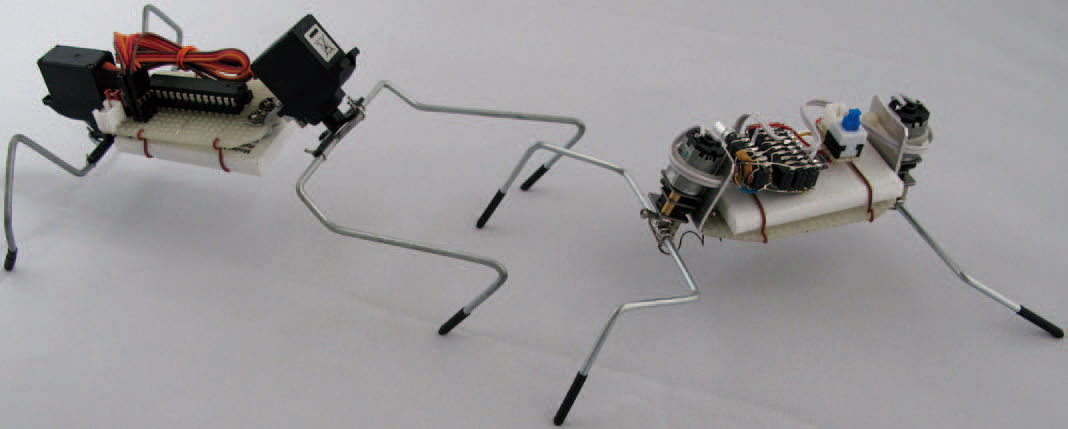
照片展示了我近期制作的两只仿生爬虫机器人,左侧的爬虫采用AVR ATMEGA8单片机控制两只舵机运转的模式,右侧的则采用BEAM神经元网络控制两只减速电机运转的模式。我们可以通过对比它们,来获知数字控制和模拟控制各自的特点