|
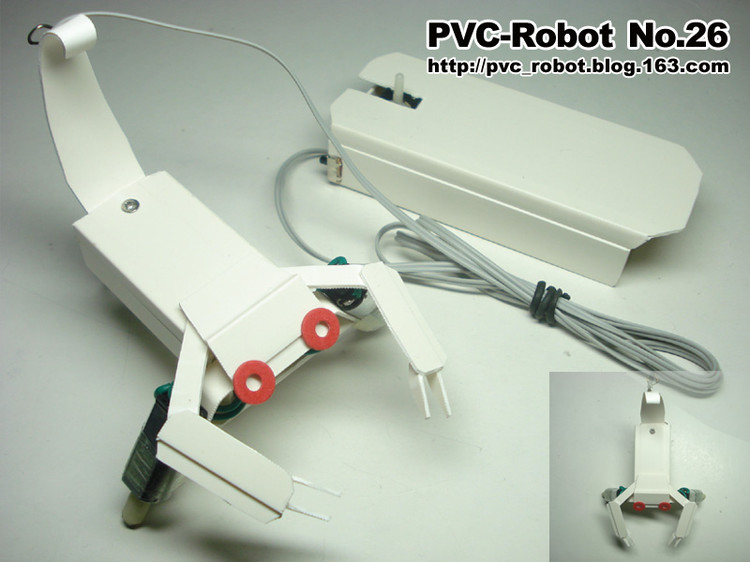
PVCBOT【26号】机械蝎子・单路线控机器人
作者:佚名 转贴自:http://www.hobbypress.cn/bencandy.php?fid-376-id-7472-page-1.htm 点击数:49
|
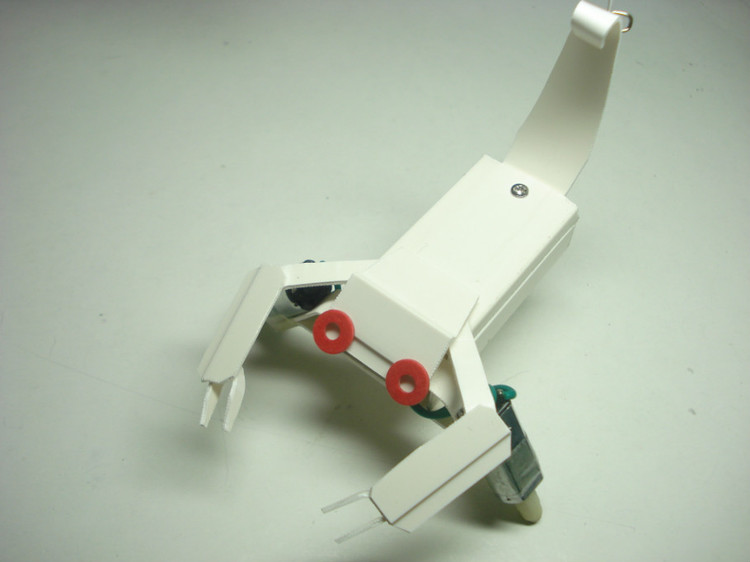
作为线控系列机器人的第一个项目,为了降低难度便于理解,当前我们先介绍一个最简单的线控机器人。由于采用的是PVCBOT最简单的单路双通道有线控制器,所以当前机器人只能实现最单一的前后运动,不过配合上专门的造型设计以及特殊的操作控制手法,倒是能够在较大程度上模仿一只张开双钳、翘起尾钩发动攻击的大蝎子。
使用“有线控制器”,除了可以控制机械蝎子前后来回运动,还可以利用前进然后突然急刹车后退的操作手法,让蝎子突然把屁股翘起来作出用尾钩攻击的姿态。
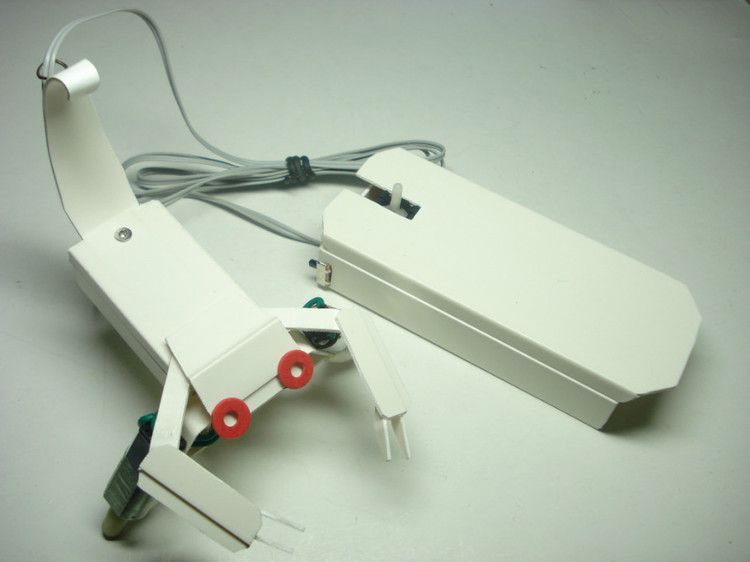
本项目实际上是一个由有线控制器操纵的小车,通过有线电缆控制器可以人为控制小车的前进、停止、后退等不同状态。
为充分发挥模块化制作的优势,本项目机器小车直接使用通用的PVCBOT-A 型基础平台车作为小车底盘,并且使用PVCBOT标准的PVCBOT-CCtrl-12A单路双通有线控制器作为控制器,大大降低了制作的难度,提高了制作的效率。
本项目的机器小车是PVCBOT-A型基础车,也就是三轮传动结构:前面左右两边的两个轮子是主动轮,各接一个电机作为动力;后轮是从动轮,起到平衡的作用。
控制前面两个轮子的转动方向就可以控制整个机器小车行进的方向:
1、左右两个前轮都向前转,则机器小车向“正前方”直线前进;
2、左右两个前轮都向后转,则机器小车向“正后方”直线倒退; 3、假如左右两个轮子的转动方向不同,就可以控制机器小车转向。
不过,当前项目我们采用的是单路双通有线控制器,仅能够控制左右两个轮同时转相同的方向,即实现前面的1和2两种情况,只能控制机器小车的前进、停止、后退,所以这里我们暂不涉及机器小车转弯的控制。
下面是机器小车的控制原理:
1、机器人的动力是一个直流电机提供的,众所周知,直流电机的两个电极连接直流电源,通过改变两个电极所连接电源的正负极,可以改变电机的旋转方向(顺时针或逆时针),即可控制小车的前进或者后退。 2、电源为两节7号电池,每节电池作为一个独立的供电单元,通过选择开关选择电机某一时刻由哪一个电池为其供电。如果前进时是一节电池供电,后退时则是另外一节电池以相反电流的方式供电。
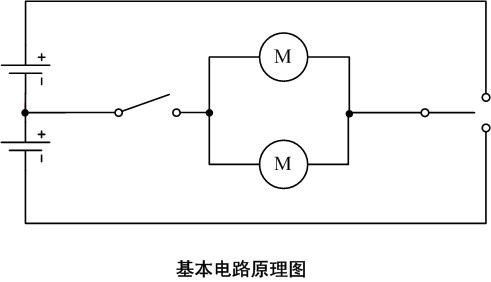
依据以上控制原理,结合本项目双轮驱动的功能需求,则整体电路的原理如下:
1、操纵开关为一个拥有三个状态的复位开关,可以控制电机的的正转、反转、停止三个状态;
2、左右两个前轮的电机以并联的方式连接在一起,两个电机同时静止,或同时前转,或同时后转; 3、电源开关可以控制总的电源通断。不过,由于采用了三状态复位开关作为操纵开关,即便打开电源开关,默认复位开关在中间位置时整个电路还是处于断路状态不通电的,也就是说一定程度上我们也可以认为这个电源开关是多余的,加上只是为了整个电路控制更完善,不至于误操纵触发。
以下是本项目机器人完整的电路原理图,即是结合了“单路双通有线控制器”在内的整体电路原理图。
1、接通电源开关; 2、操作开关默认在中间位置,机器小车的左右两个前轮电机不转动,即机器人处于静止状态; 3、左右(或上下)拨动操纵开关,控制机器小车的左右两个前轮电机同时实现正转或反转,即机器人处于前进或后退状态。
为方便初学者,这里再提供电路焊接示意图。
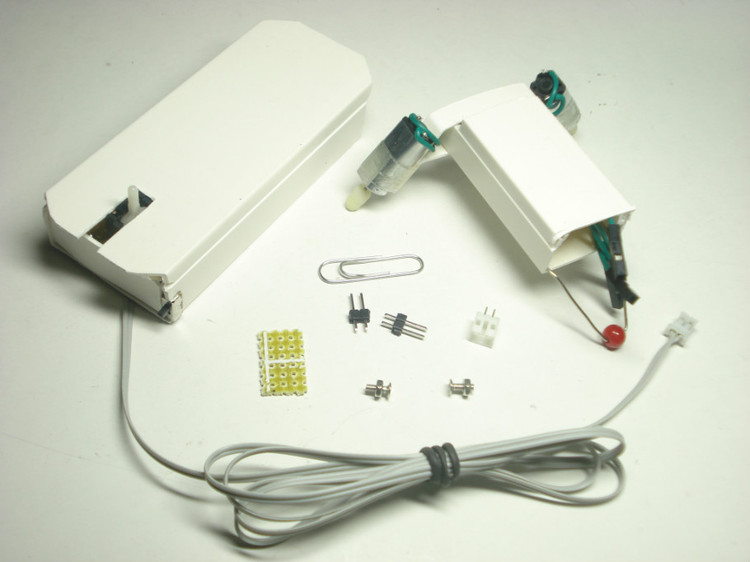
本项目需要的器材主要包括:PVC线槽、PVCBOT-A型基础平台小车、PVCBOT-CCtrl-12A有线控制器、螺丝、排针等。
本项目直接使用PVCBOT-A 型基础平台车作为底盘,直接使用PVCBOT-CCtrl-12A单路双通有线控制器作为控制设备,简化了制作过程,关于底盘和控制器的制作过程见:PVCBOT-A 型基础平台车、PVCBOT-CCtrl-12A单路双通有线控制器,这里也不再重复介绍。
以下将主要针对其他部分的制作过程进行详细介绍。
首先焊接电路板。 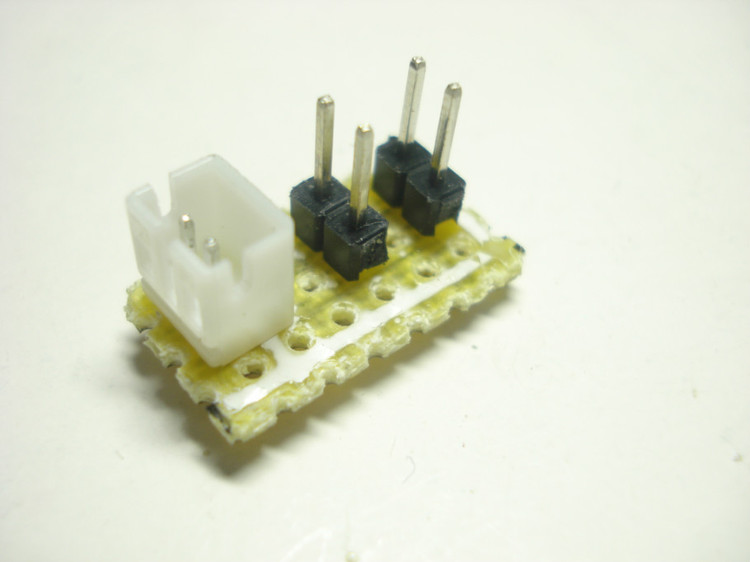 把PH插座、排针按照下面的示意图的位置焊接到洞洞板上,并且焊接好连线。
 然后把准备好的 PVCBOT-A 型基础平台车 上连接电机的两组杜邦线(绿)分别插到电路板上的两个排针上;再把 PVCBOT-CCtrl-12A单路双通有线控制器 电缆上的PH插头也插到电路板上。
 尝试打开有线控制器侧边上的电源开关,然后前后拨动有线控制器上操纵杆。正常情况下,应该是往前拨动就是两个电机都能够往前走;向后波动操作杆则两个电机都同时退后。
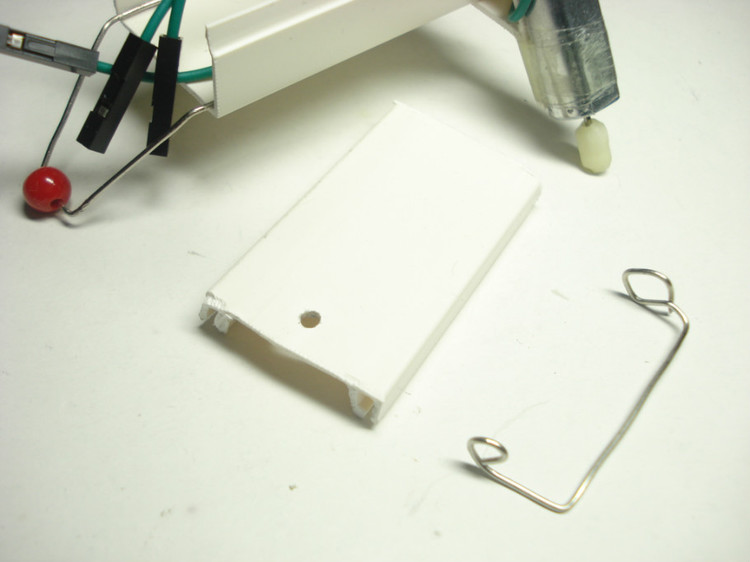
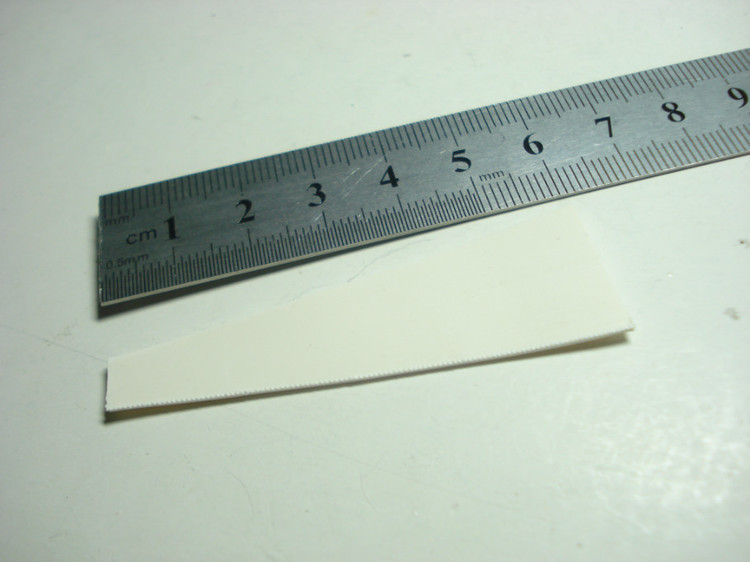
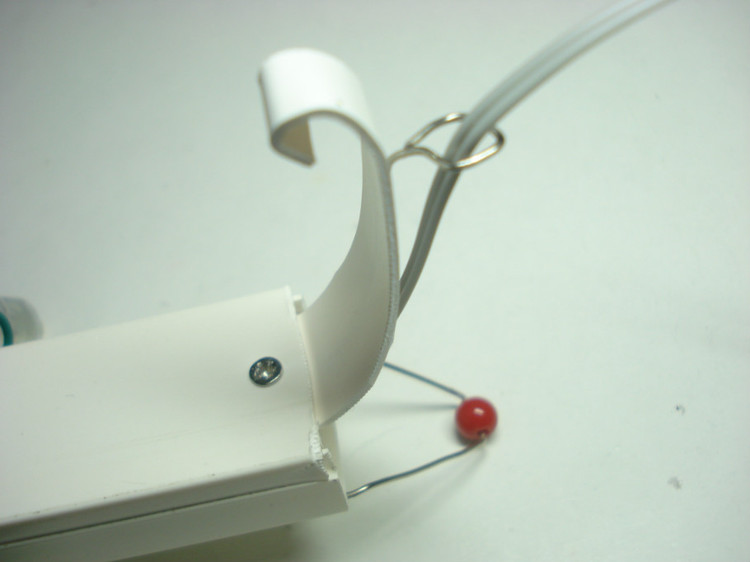
1、假如小车原地打转,说明是其中一个电机安装错误,把该电机找出来,然后调换其两根杜邦线所插接的排针; 2、假如有线控制器操纵的小车运动方向搞反了,即往前拨操作杆小车是后退,而往后拨操纵杆小车却是前进的,则可以把两组电机的杜邦线都调换过来插到排针上。 用曲别针借助尖嘴钳扭成如下形状的线架,两端都是一个弯折的圆圈,其中小的一个圆圈直径最好是在2mm左右,以便后面借助M2螺丝来安装固定。 用线槽盖,剪出大约大约长5CM的一段作为小车底盘的顶盖,并在其中一侧的边缘用锥子打上一个直径大约2mm的小孔。
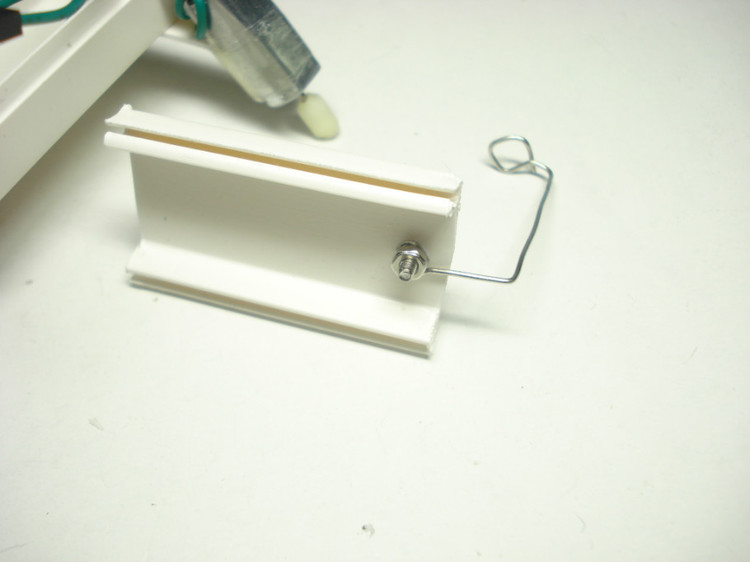
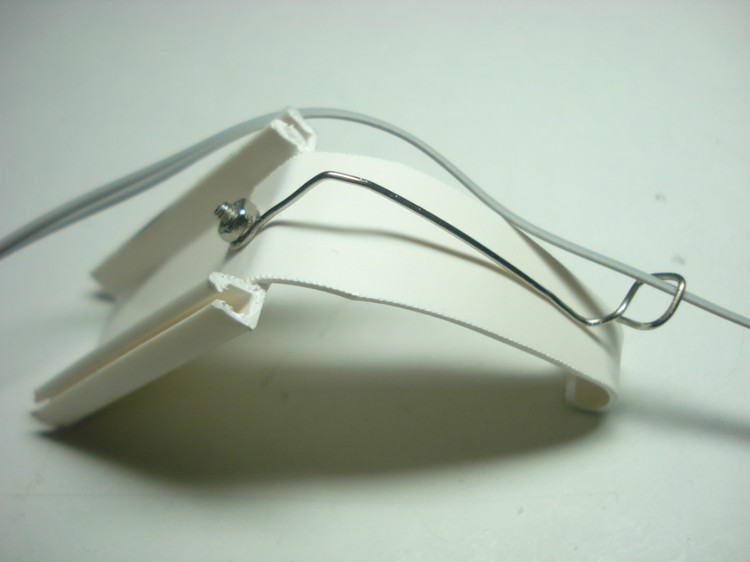
 把曲别针制作的线架借助M2*6的螺丝/螺母固定在顶盖上。
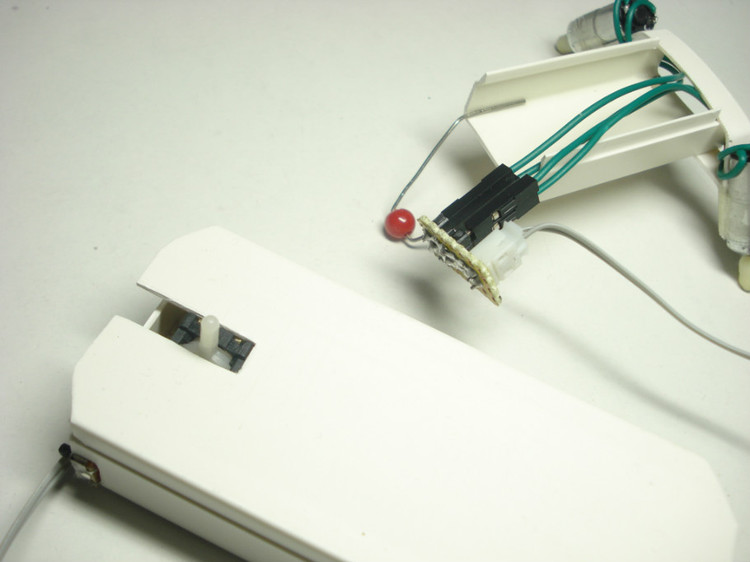
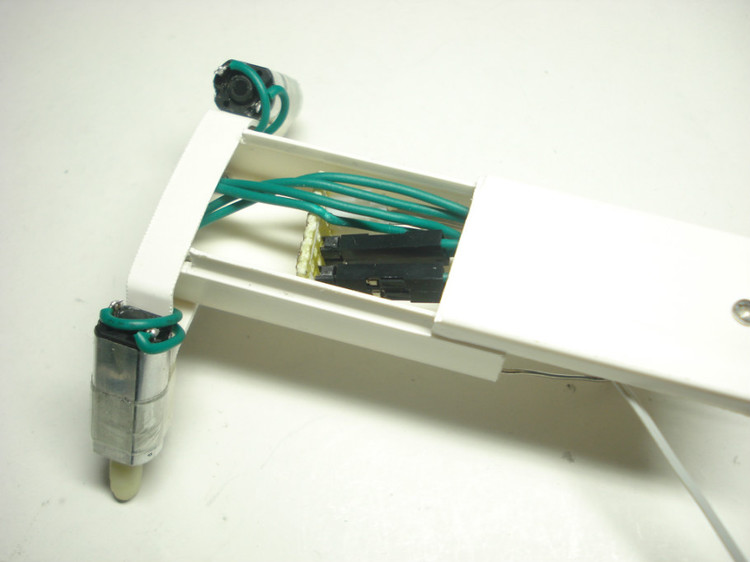
  把插接了杜邦线以及排线的电路板放置到小车底盘内部,并整理好导线。
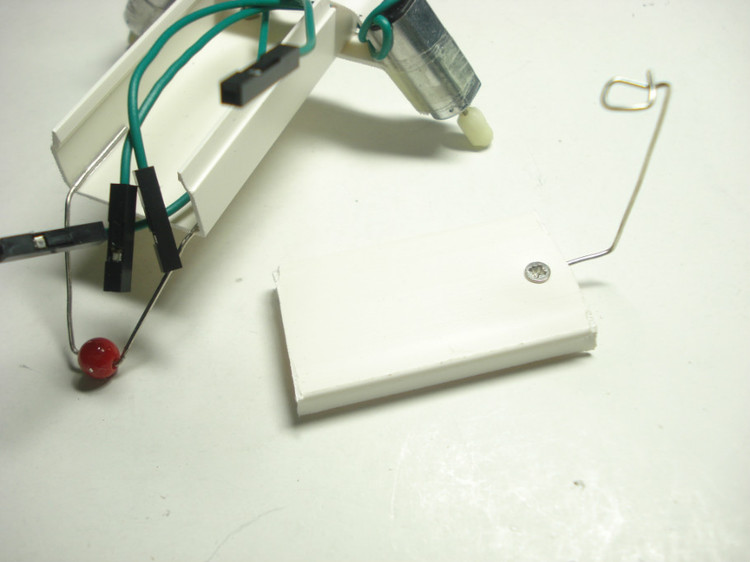
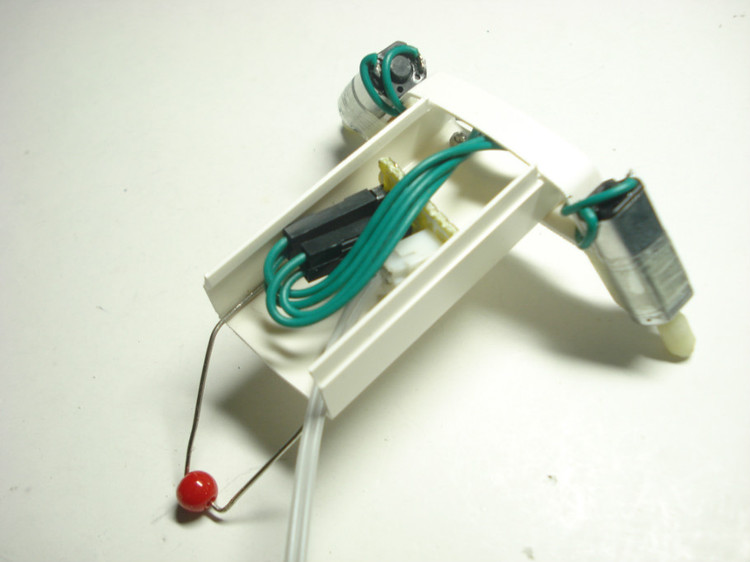 把小车的顶盖给盖上。
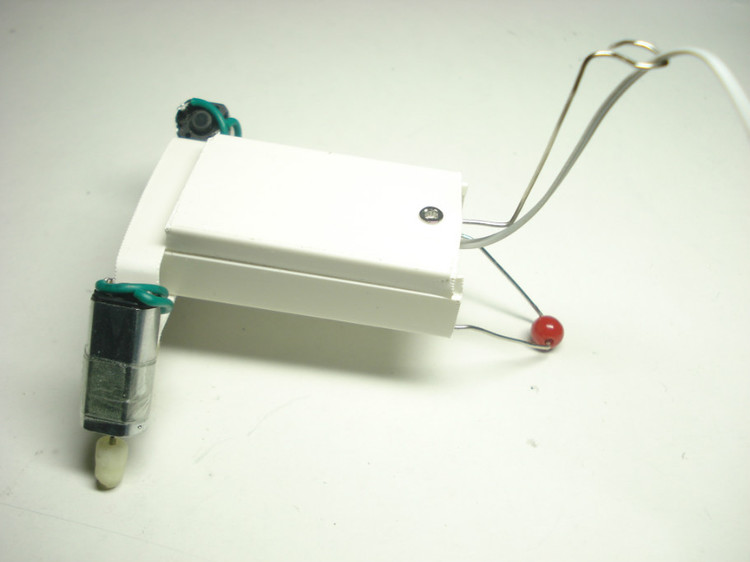
  把连接到有线控制器的电缆穿过立起来的线架上,这里之所以要用线架把电缆撑起来主要是防止电缆绊住小车轮子而影响小车的行动。
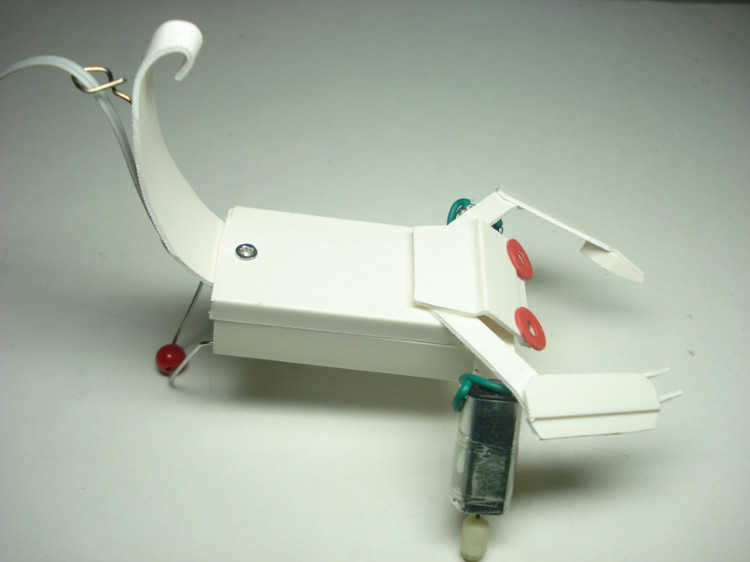
(1)尾巴 剪一段长6CM左右PVC梯形条(梯形短边大约0.5CM、长边大约2CM),作为当前蝎子机器人的尾巴。
 在梯形条长边一侧打一个直径2mm左右的小孔,并且如图所示用尖嘴钳弯折一下。
 把顶盖从小车底盘上拆下,再把之前线架与顶盖固定在一起的M2螺母也卸下来,如图所示把尾巴装在顶盖和线架之间,最后再重新拧上螺母固定好。
  把顶盖重新装到小车底盘上。
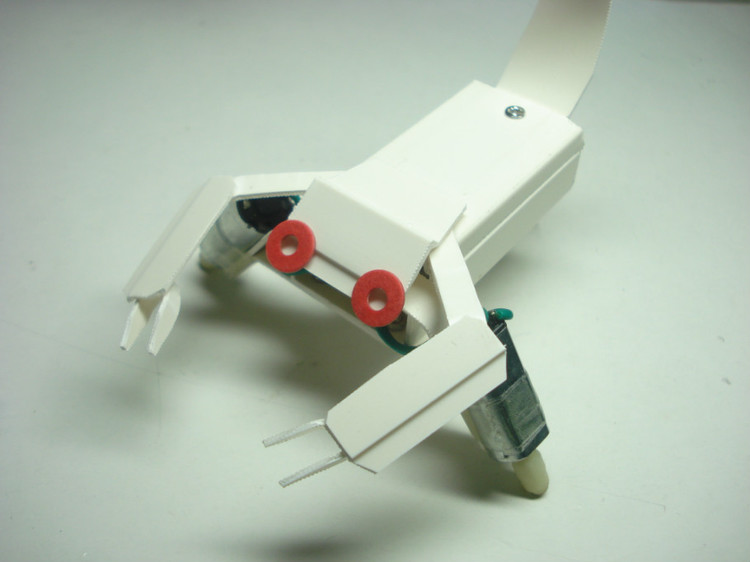
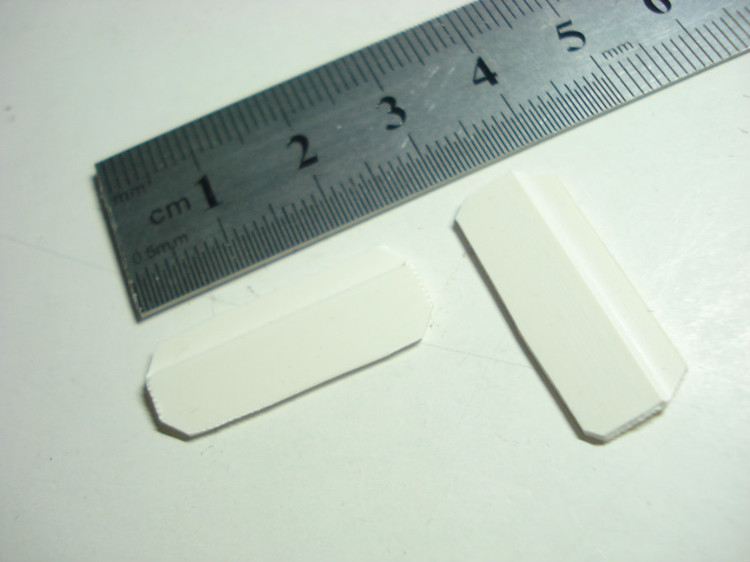
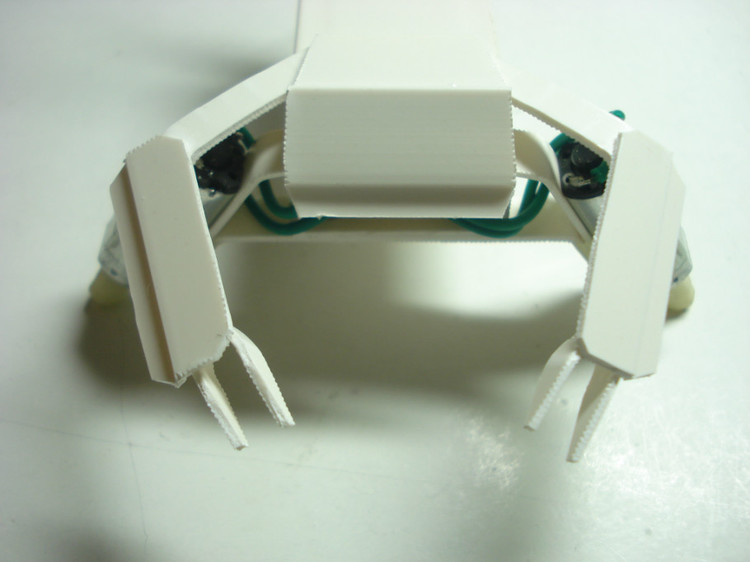
 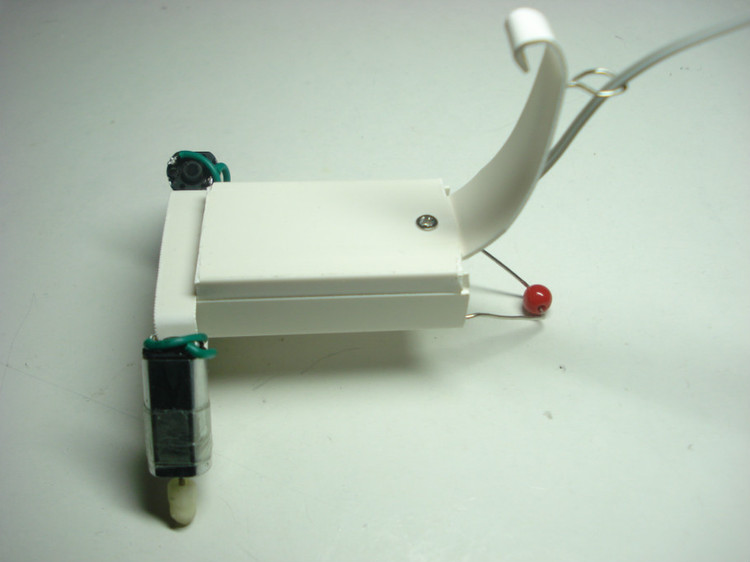  (2)双臂 剪两片长大约2.5CM、宽0.5CM左右PVC方条,作为上臂部分。
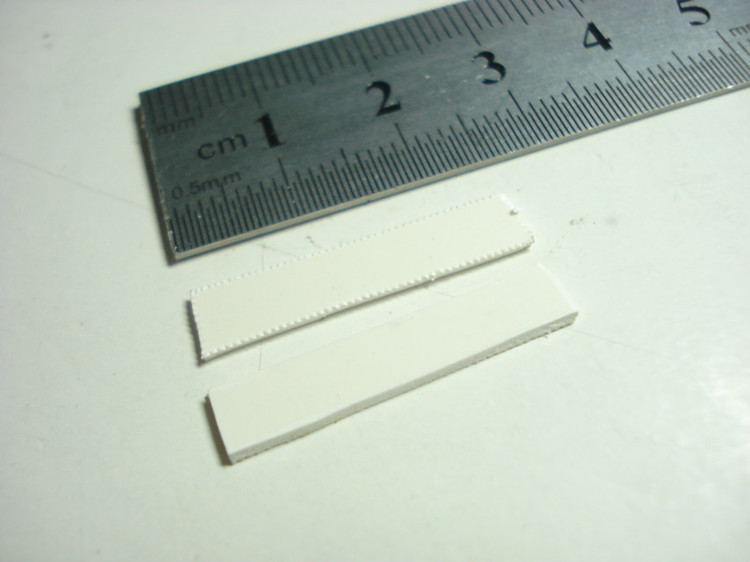 沿着PVC线槽侧边(存在槽位)再剪两块长约2.5CM、宽1CM左右的PVC方片,作为前臂部分。
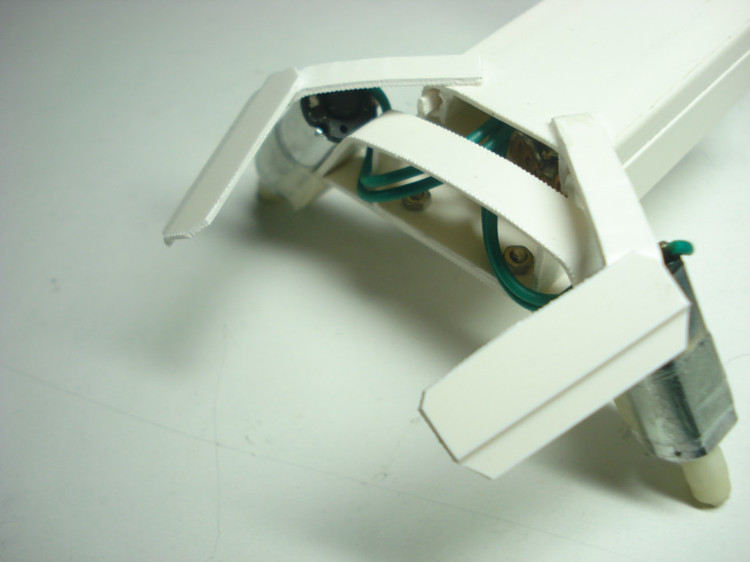
 如图所示把上臂用502胶水粘贴在小车顶盖上。
 再如图所示把前臂用502胶水连接粘贴在上臂上。
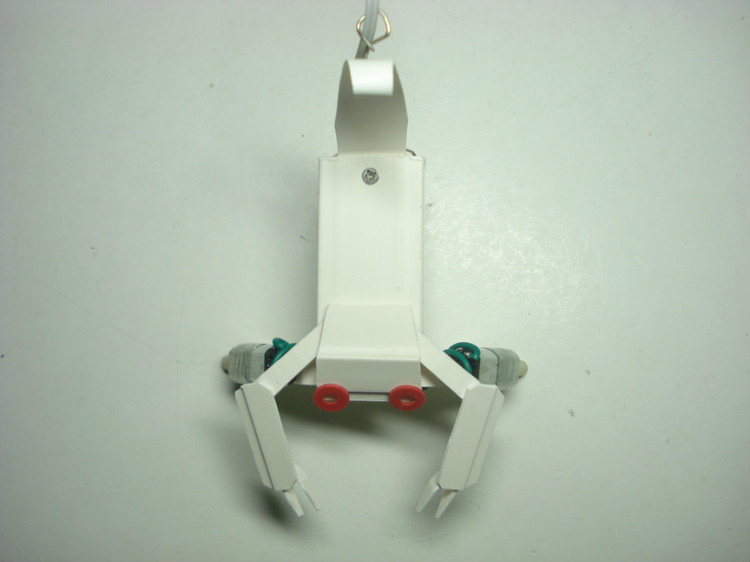
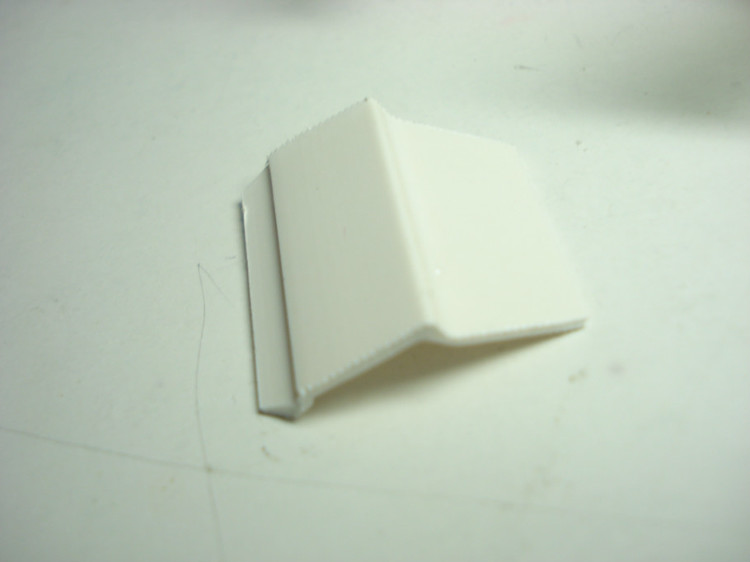
  (3)头部 把PVC线槽带弯折的部分剪出长约2CM 左右的一段。
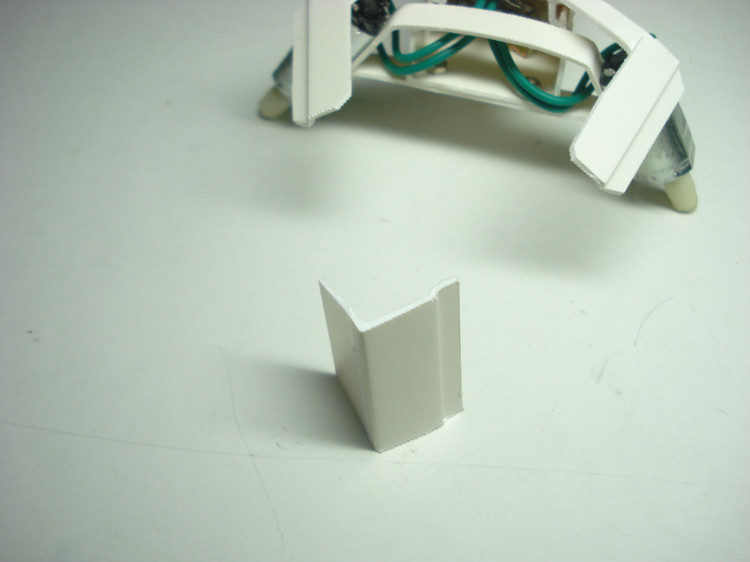 可以把弯折体底部剪成梯形状,作为头部。
 把弯折的角度稍微扩大一些。
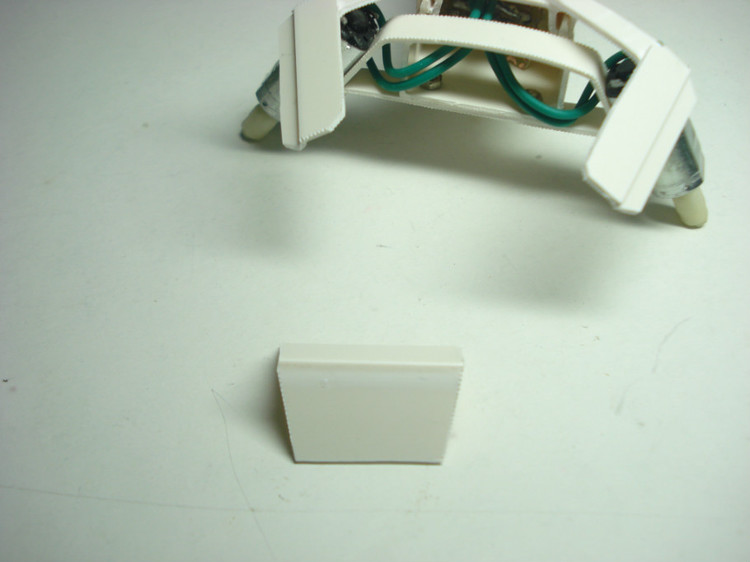
 再用502胶水把头部粘贴在上臂顶上。
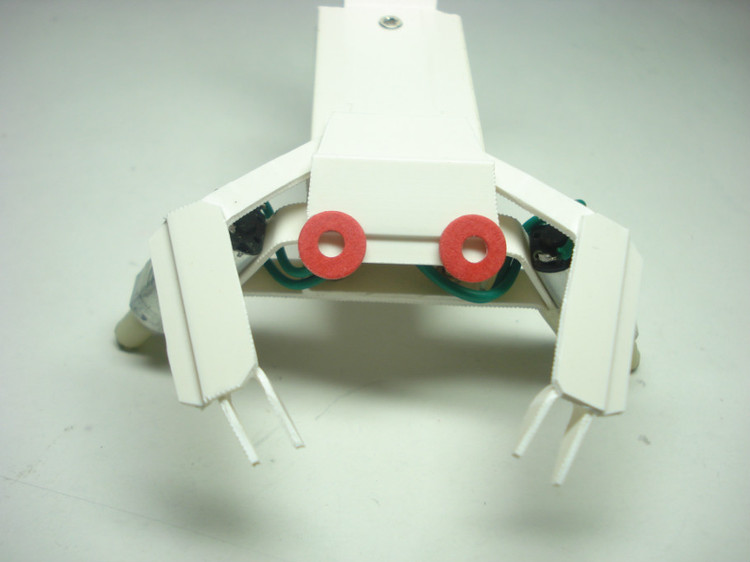
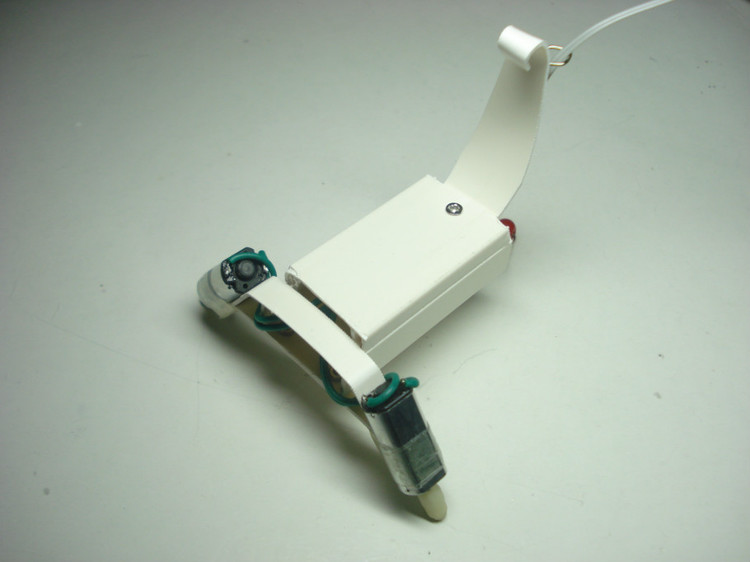
 (4)双钳 剪两段长约3CM、宽0.3CM左右的PVC条,并且两段剪尖整体呈梭状。
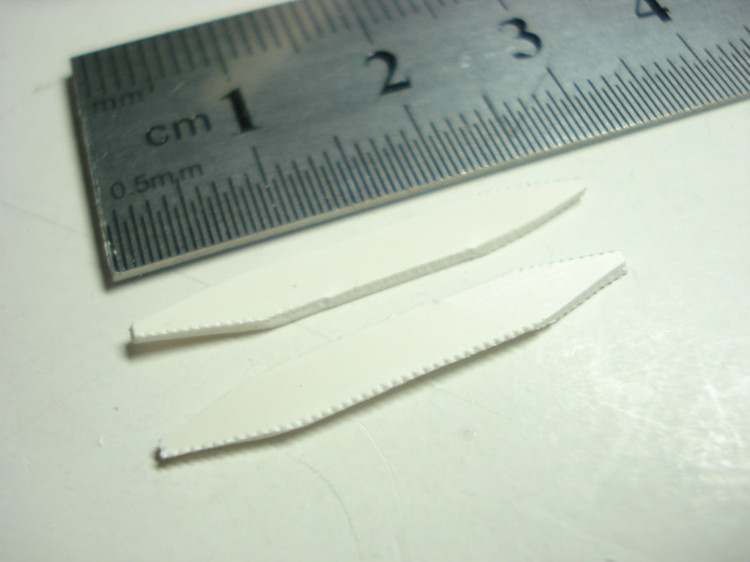 把两片梭状PVC条如图所示进行弯折,做成钳子。
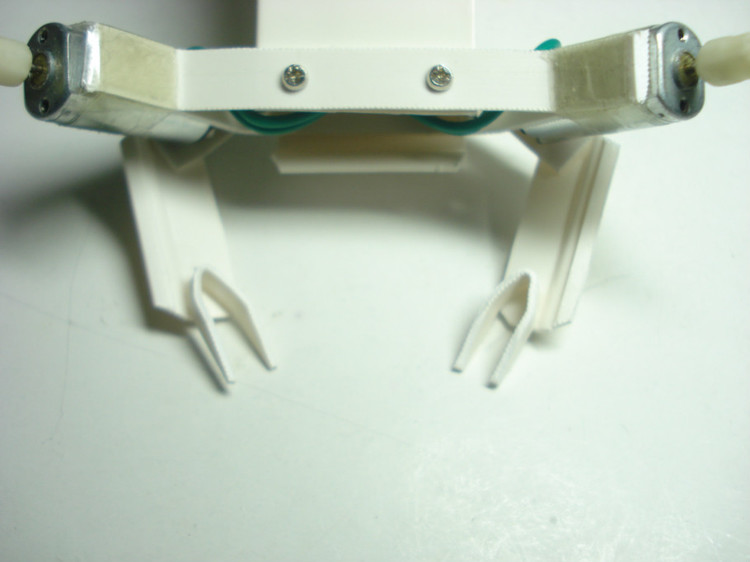
 再用502胶水把钳子如图所示粘贴在前臂上。
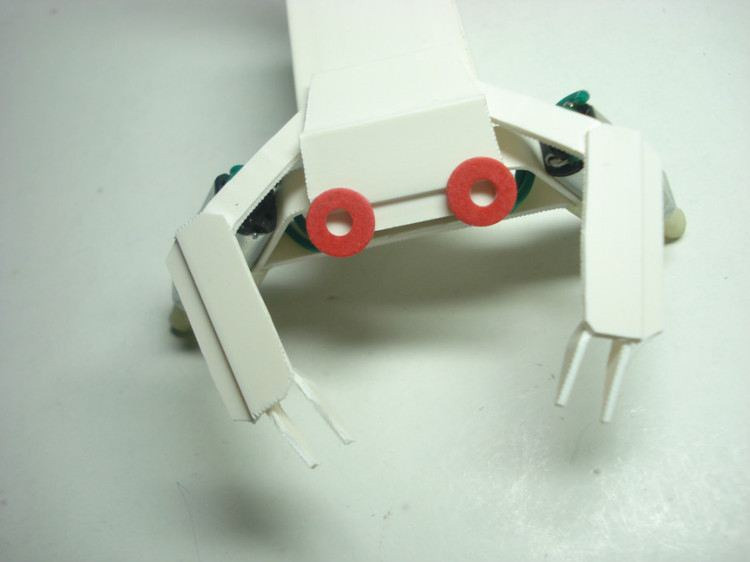
  (5)眼睛 把两片M3的垫片用502胶水粘贴到头部前端,做成一对眼睛。
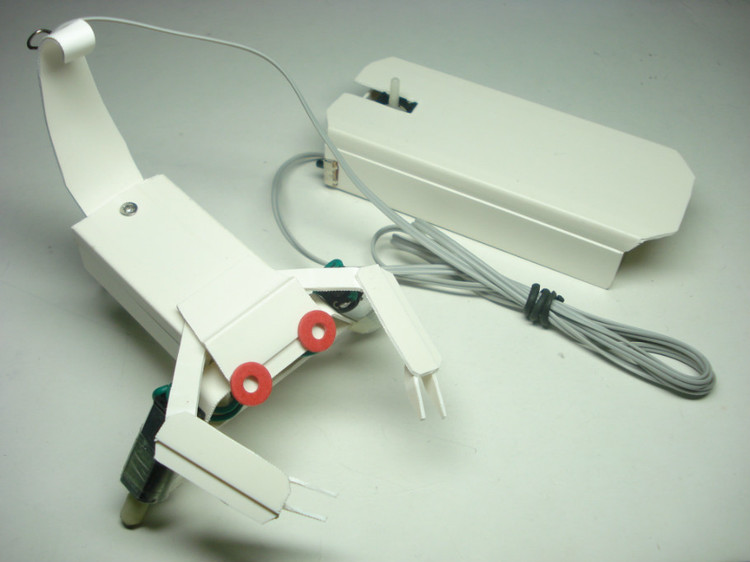
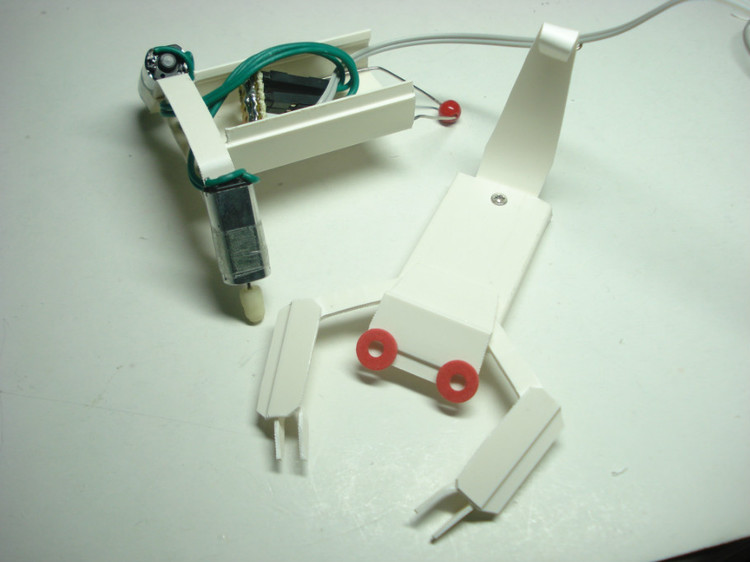
 把顶盖装到小车上,进行适当的调试,就可以完成总装。
 尝试打开有线控制器侧边上的电源开关,然后前后拨动有线控制器上操纵杆。正常情况下,应该是往前拨动就是两个电机都能够往前走;向后波动操作杆则两个电机都同时退后。 1、假如小车原地打转,说明是其中一个电机安装错误,把该电机找出来,然后调换其两根杜邦线所插接的排针; 2、假如有线控制器操纵的小车运动方向搞反了,即往前拨操作杆小车是后退,而往后拨操纵杆小车却是前进的,则可以把两组电机的杜邦线都调换过来插到排针上。  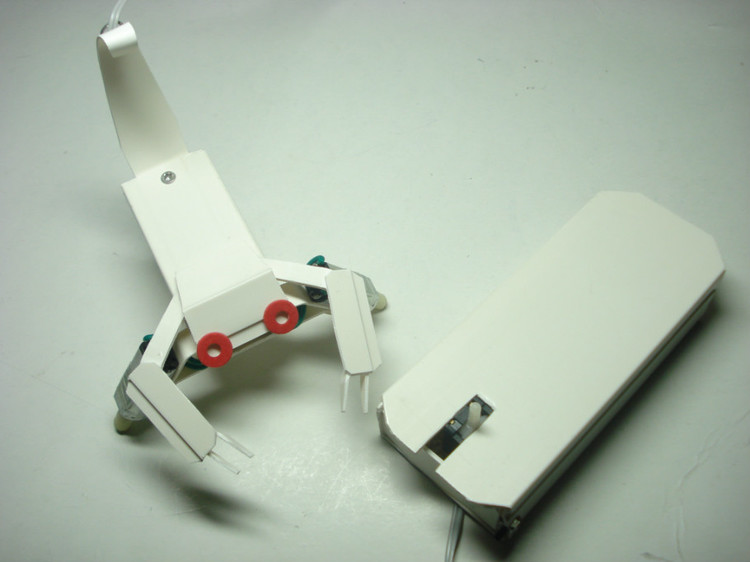 作为线控系列的第一个机器人,通过当前项目我们可以:
1、理解基本的小车控制原理;
2、理解有线控制基本原理; 3、学习制作线控机器人。
本项目实际上是比较简单和容易理解的,不过即便如此,对于初学者还是建议要关注一下。 |