作者:李慧 转贴自:微计算机信息
The Hardware Design Of Automatic Control System In Astronomical Telescope
Abstract: Automatic control system of astronomical telescope is mainly presented from the control hardware aspect in this text; We receive two signals (from handle box and PC) at the same time and dispose them and drive telescope working to implement finding star automatically offline and online adopting intelligent MPU named W77E58 with double COM ports;
Keywords: control hardware, PC, finding star automatically
摘要:本文主要从控制硬件方面对天文望远镜的自动控制系统进行阐述,采用双串口的智能微处理器W77E58,同时接收两路信号(来自把手盒和工控机),并进行处理,驱动望远镜实现在线和脱机自动找星两种功能。
关键词:控制硬件,工控机,自动找星
一、 望远镜的自动控制系统总体简介
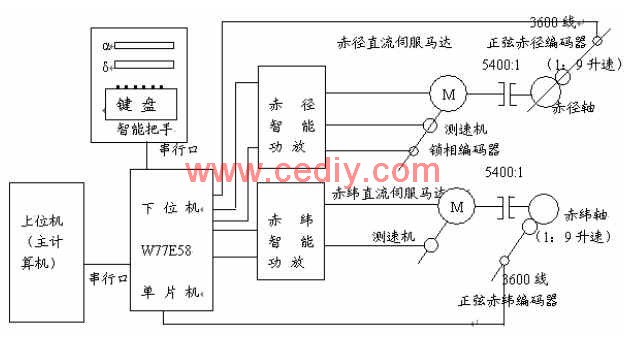
该系统主要包括:上位机、下位机、智能把手控制盒、高精度赤经赤纬增量式正弦编码器、锁相低精度增量式编码器、智能驱动功放等。与传统构成方式相比较,本系统设计突出了智能功能的应用(图一)。
望远镜的自动寻星及跟踪系统方框原理图(图一)
二、PC机部分介绍
上位机(PC机)即一台电脑,从计算机系统的SKYMAP星图软件中提取待寻天体的坐标,并做一系列换算,通过RS232串行口与下位机交换数据和命令。
三、下位机部分介绍
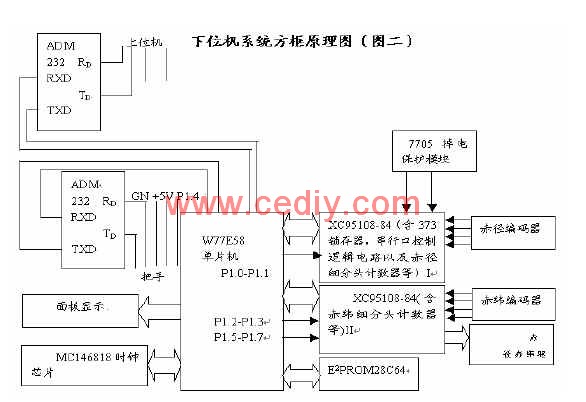
下位机主要是选用双串口微处理器W77E58 ,通过两路RS232串行口分别与上位机以及智能把手相互交换数据(见图二),以四倍频细分的方式采集赤经、赤纬增量式圆光栅编码器的角度值,实现位置闭环。还配备了具有时间校准及断电保护功能的地方恒星时时钟。此外,系统还备有8K E2PROM和控制赤经、赤纬的智能驱动模块等。
四、把手盒部分介绍
作为系统人机对话的控制核心,智能把手控制盒采用89C51微处理器,备有系统工作状态指示灯,它们分别是:赤经恒动,赤经+/-快慢微动,赤纬+/-快慢微动,系统故障指示等6只。还设有时角、赤纬各7位数码显示,分别显示天体时角(时分秒)以及赤纬(度分秒)。配有RS232串行口与下位机交换数据,作为人机对话的输入设备的微键盘有22只键,他们分别为:0-9数字键10只、α/δ置数键2只、标定功能键和寻标功能键各1只、赤经赤纬正反快慢微动控制键8只。脱开上位机,利用把手控制盒可以单独设置目标星的赤经和赤纬;自动校正望远镜的指向误差;确定望远镜的绝对零点(即标定:采用天顶附近的星作为参照,校正望远镜位置的绝对零点),望远镜的标定位置便保存到断电保护寄存器中,今后开机就不必重复作标定操作。
赤经赤纬位置编码器计数器、判相电路、4倍频电路等逻辑电路都采用了 XC95108-84大规模门阵编程方法来完成,因此他们的可靠性,可修改性及保密性都极佳,即具有柔性化的特点。
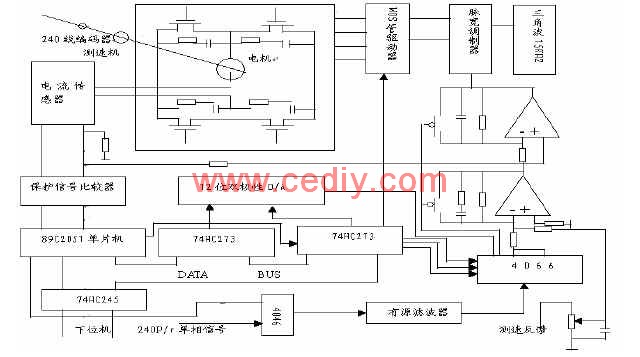
智能驱动功放原理图(图三)
五、驱动部分以及锁相跟踪控制
赤经和赤纬智能驱动模块(图三)均由89C2051微处理器与PWM驱动功放构成,只是赤经模块比赤纬模块多了一个恒动锁相跟踪环。
智能驱动功放由89C2051微处理器、12位双极性D/A、琐相环、放大校正环节、速度环、电流环、15KHZ锯齿波发生器及脉宽调制器、PWM驱动器以及保护电路等组成,集成为高精度数字化控制模块.智能驱动功放接收下位机的四位编码信号,高四位为控制赤经编码,低四位为控制赤纬编码,四位编码可以有16种控制状况,足以满足手动、自动控制状态要求。手动控制时,按照常规要求来设置望远镜速度: 由12位双极性D/A输出控制电压,此模拟量由89C2051选通模拟开关4066经放大校正环节馈给脉宽调制器,控制脉冲宽度,以达到控制速度的目的。望远镜的径轴和赤纬轴均由直流伺服电机驱动,机械传动比皆为5400:1,手控望远镜的驱动速度为:
微动 ±3′/分(赤经方向迭加在15′/分恒动速度上)
慢动 ±3˚/分
快动 ±90˚/分
该系统的速度调节范围为1800倍.采用1500转/分直流伺服电机,其测速机的灵敏度为12V/千转; 采用12位双极性型D/A,它的分辨率为±2048,便能满足上述要求。
表1中快动1和快动2为望远镜自动寻星时提供的速度选择。本系统中,恒动与手动控制无关,由锁频锁相电路单独控制,它采用一只240线空心轴增量式编码器,直接固联在电机轴上,提高锁相精度.由于赤经传动比为5400:1,所以编码器每条光栅线(3600/240/5400=1角秒)对应1角秒的锁相跟踪精度。跟踪时,89C2051微处理器每秒发出15个脉冲,对锁相来说, 这是比较容易锁定的区域。为了以高精度锁定跟踪频率, 我们采用了4046锁相电路,其输出相位差通过有源滤波器,变成线性直流电压,其作用相当于低通滤波器②,由于机械速比大,直流伺服电机功率小,从而为调节器提供了快速频率响应,锁相相位精度可达到T/8~T/6相位差,确保锁相环安全可靠地锁定在15HZ基频上.这种精度保证了望远镜对天体进行稳定的跟踪。
结束语
经过一个多月的实际使用观测,该系统运行良好,找星定位准确,精度高,能适用于各种大中小型的望远镜。
参考文献:
1 张毅刚,彭喜源,谭晓昀. MCS-51单片机应用设计. 哈尔滨:哈尔滨工业出版社,1997
2 Roland E.Best. PHASE-LOCKED LOOPS Theory, Design, and Applications. Published in USA, 1988
作者简介:
李慧,男,出生于1980年6月,淮阴工学院讲师,毕业于中国科学院南京天文仪器研制中心,主要从事自动控制方面的研究。
EMAIL:jichsli6@163.net;
通信地址:223002 江苏省淮安市大学城淮阴工学院南校区电信系 |